







 超级会员免费看
超级会员免费看
系列文章目录
提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加
TODO:写完再整理
文章目录
前言
机器人人动作策略规划相关教程及博客请关注专栏:
https://blog.csdn.net/qq_35635374/article/details/138175048
本文先对动作策略规划导读做个简单的介绍,具体内容后续再更,其他模块可以参考去我其他文章
提示:以下是本篇文章正文内容
一、无人驾驶/机器人规划方向综述
简述无人驾驶/机器人的决策、路径规划、控制跟踪方向的理论方向和工程部署经验
机器人自主导航可以分成两个实现部分,第一个部分就是路径规划,第二个部分就是动作控制策略。
https://blog.csdn.net/qq_35635374/article/details/120926131
二、导航任务决策常用工具及方法
介绍无人驾驶/机器人的决策的常见业务场景,并介绍一些用于决策的工具,根据不同的工程及环境机工具特性选择合适的决策工具,包括:
微控制器或者linux系统平台的中断触发机制(ROS的话题、服务、action机制、定时器机制)方法
编程语言C/C++等的条件语法if-else(switch)方法
有限状态机FSM方法
分层有限状态机HFSM方法
ROS的任务级状态机smach方法
决策树decision tree/行为树behaviar tree方法
MDP及行为决策模型(POMDP方)方法
基于知识的推理决策方法
强化学习(Reinforcement Learning, RL)方法等等
https://blog.csdn.net/qq_35635374/article/details/120592768
三、tinyfsm的实现
介绍tinyfsm的原理、使用 tinyfsm 的一般步骤及源码实现
https://blog.csdn.net/qq_35635374/article/details/137793485
四、有限状态机FSM设计方法及代码实现
介绍有限状态机FSM设计方法及代码实现,着重分享了有限状态机FSM部署的一些经验
第一章:行为树的基本概念及behavior tree core源码分析
第二章:behavior tree行为树结构设计的技巧&BT与FSM对比结合
第三章:行为树behavior tree部署示例(源码移植、库实现、ROS1/ROS2平台)
五、行为决策树BT-Tree
介绍行为决策树BT-Tree的原理、使用行为决策树BT-Tree的一般步骤及源码实现
https://blog.csdn.net/qq_35635374/article/details/138792622
六、机器人集群编队决策规划
介绍多机器人集群编队策略,作为案例介绍多机器人决策规划–tuw_multi_robot、多机器人规划 EGO-Swarm算法两种实例
https://blog.csdn.net/qq_35635374/article/details/127926425
七、相关案例
1、机器人动作规划案例move_base
介绍move_base的机器人动作规划案例
https://blog.csdn.net/qq_35635374/article/details/127926743
2、HFSM四足机器人步态的有限状态机fsm_manager
介绍四足机器人步态的有限状态机HFSM动作规划案例
https://blog.csdn.net/qq_35635374/article/details/122049813
3、autoware的决策规划控制模块案例
介绍autoware的决策规划控制模块案例
https://blog.csdn.net/qq_35635374/article/details/124654200
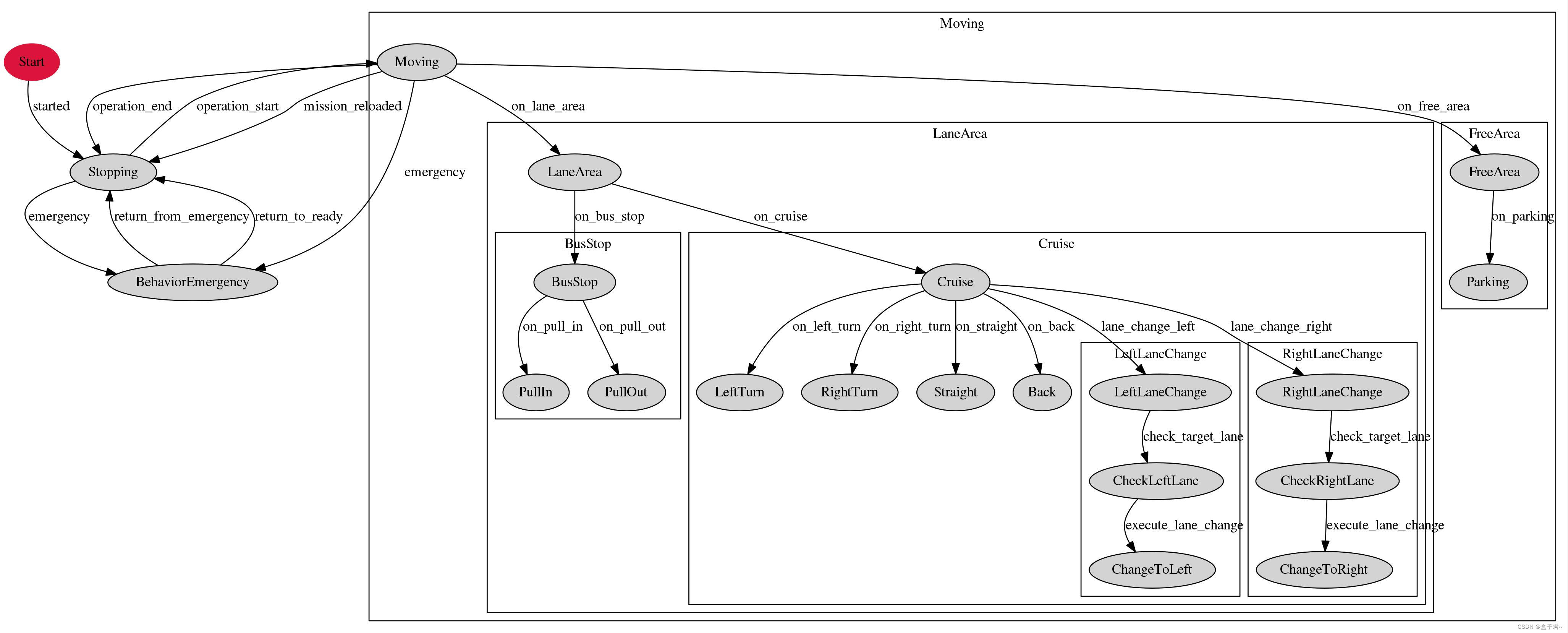
4、无人驾驶的行为决策分层有限状态机HFSM
介绍无人驾驶的行为决策分层有限状态机HFSM动作规划案例
https://blog.csdn.net/qq_35635374/article/details/121784539
5、control manager多控制器管理与切换的方法
介绍多控制器管理与切换的方法,实现机器人在不同场景调用不同控制器,或在同一场景组合多控制器,实现机器人连贯的控制动作。
https://blog.csdn.net/qq_35635374/article/details/121745509
















 460
460











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











