







 本文介绍了SMART PLC的梯形加减速点动功能块,通过开启定时中断并在不同加减速时间内实现控制。文章提供STL代码供读者参考学习。
本文介绍了SMART PLC的梯形加减速点动功能块,通过开启定时中断并在不同加减速时间内实现控制。文章提供STL代码供读者参考学习。
梯形加减速算法介绍,大家可以搜索RXXW_Dor博主写的系列文章,这篇文章主要给出SMART PLC梯形加减速点动功能块梯形图代码,下面我们简单的看SMART PLC里的代码部分。
1、SMART PLC梯形加减速点动功能块
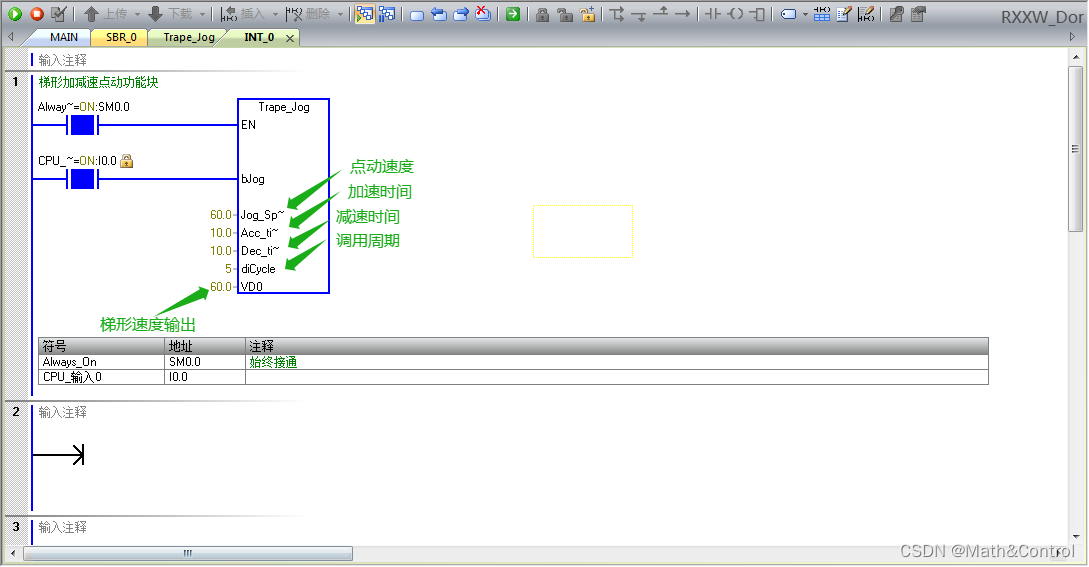
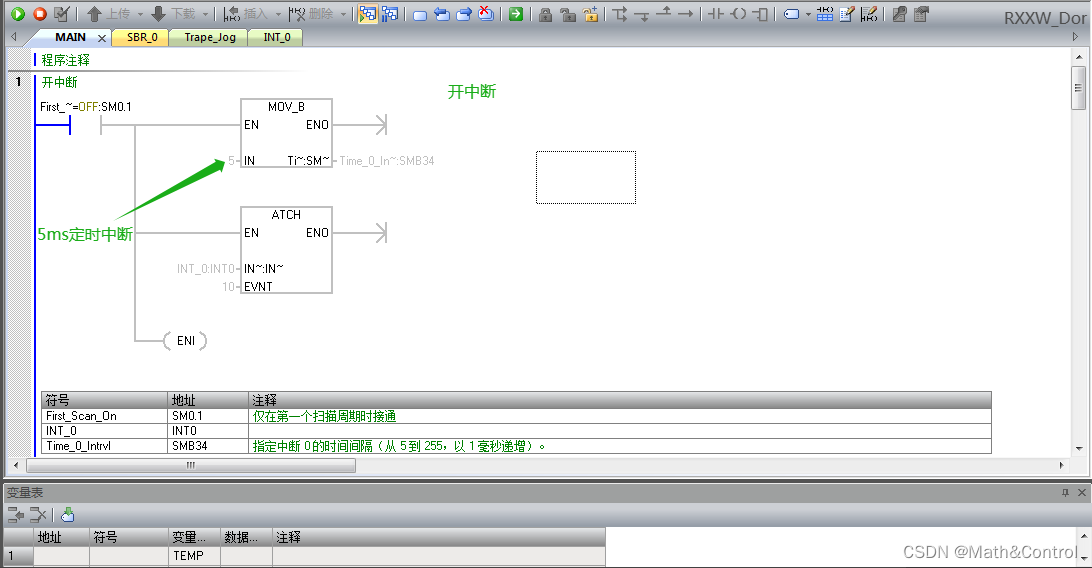
梯形加减速点动功能块需要在定时中断里调用,下面我们看SMART PLC里如何开启定时中断。
2、开启定时中断
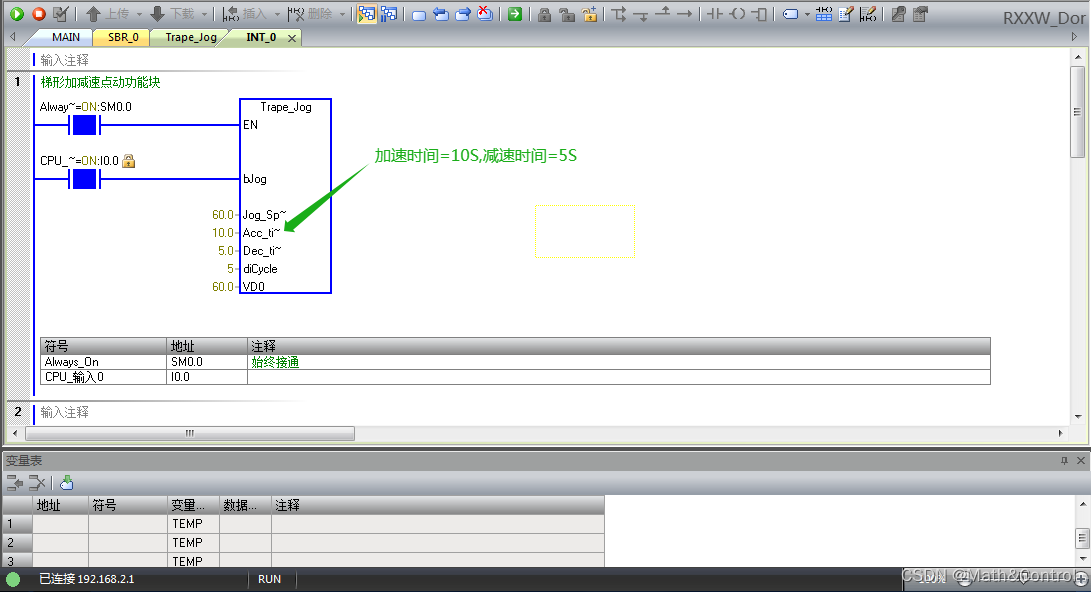
3、加减速时间可以设置不一样
 代码部分不再做过多解读,大家可以自行查看,下面将STL代码上传
代码部分不再做过多解读,大家可以自行查看,下面将STL代码上传
4、完整STL代码
SUBROUTINE_BLOCK Trape_Jog:SBR1
TITLE=梯形加
 订阅专栏 解锁全文
订阅专栏 解锁全文


















 517
517

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











