







 超级会员免费看
超级会员免费看
1硬件顺序及串口
(1)从左到右的顺序:雷达串口、imu、扩展坞

(2) 小车底盘(红色单片机控制开启)
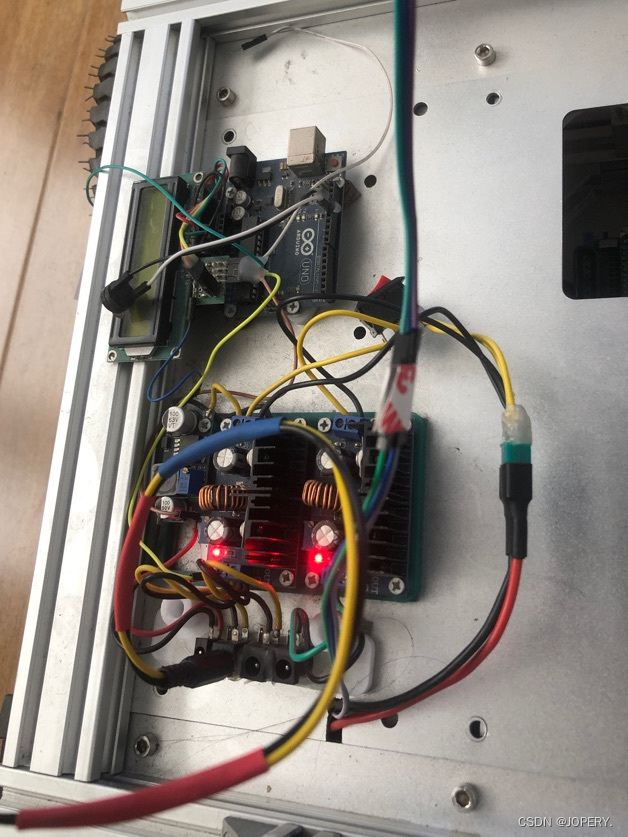
(3)扩展坞连接底盘借口与U盘

二 开启键盘控制节点与底盘节点
在base_ws文件中开启,每个节点开启前需要source
source devel/setup.bash(1)开启电脑键盘控制节点
roslaunch wheeltec_robot_rc keyboard_teleop.launch(2) 开启底盘启动节点
roslaunch turn_on_wheeltec_robot base.launch 三 开启算法节点
在 catkin_lio-sam_ws文件中开启四

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 968
968











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









