







配置:Y9000P i9 3060 2022 ubuntu18.04+ROS Melodic
目录
安装及配置环境过程
一.运行下载的源码
工作空间下,终端运行:
source devel/setup.bash
roslaunch lio_sam run.launch二.跑别人的数据包运行:
source devel/setup.bash #在catkin_ws工作空间下roslaunch
roslaunch lio_sam run.launch #在catkin_ws工作空间下roslaunch
rosbag play casual_walk.bag -r 3 #注意:此处在你的数据包存放位置处打开,我的放在src/data下
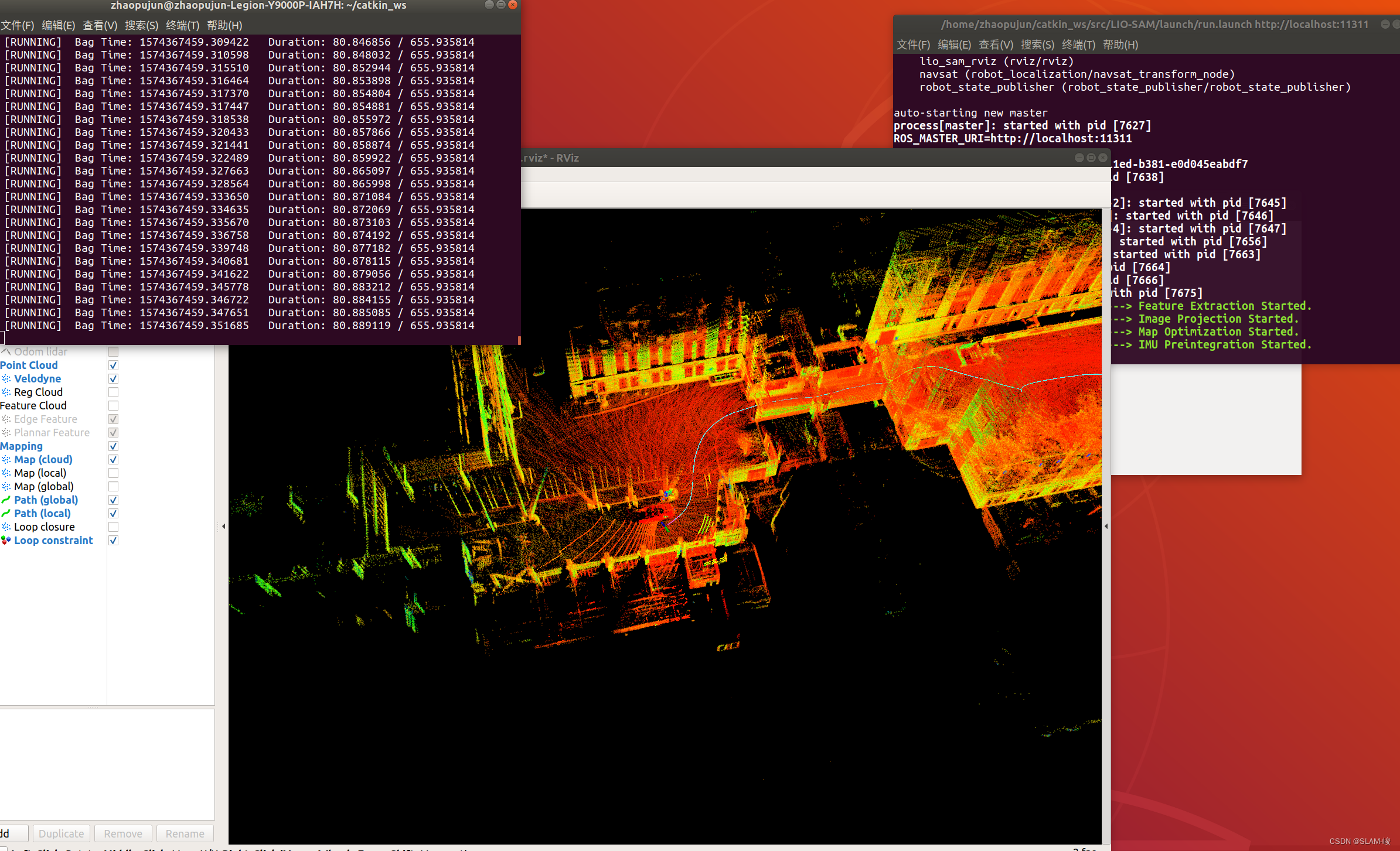
运行结果:
tips:
查看数据包信息INFO
rosbag name.bag info//查看topic和type三.运行时出现的相关错误
1.
[lio_sam_imuPreintegration-2] process has died,[lio_sam_mapOptmization-5] process has died
参考:
上文作者为剪切mv,此处改为复制cp,降低运行失败的风险
cd /usr/local/lib/
sudo cp libmetis.so /opt/ros/melodic/lib/
接着又出现如下错误,-2变成-3,怎么都解决不了
[lio_sam_imageProjection-3] process has died [pid 5264, exit code 127, cmd /home/zhaopujun/catkin_ws/devel/lib/lio_sam/lio_sam_imageProjection __name:=lio_sam_imageProjection __log:=/home/zhaopujun/.ros/log/accb98ae-6294-11ed-aea3-e0d045eabdf7/lio_sam_imageProjection-3.log].
log file: /home/zhaopujun/.ros/log/accb98ae-6294-11ed-aea3-e0d045eabdf7/lio_sam_imageProjection-3*.log
[lio_sam_featureExtraction-4] process has died [pid 5265, exit code 127, cmd /home/zhaopujun/catkin_ws/devel/lib/lio_sam/lio_sam_featureExtraction __name:=lio_sam_featureExtraction __log:=/home/zhaopujun/.ros/log/accb98ae-6294-11ed-aea3-e0d045eabdf7/lio_sam_featureExtraction-4.log].
log file: /home/zhaopujun/.ros/log/accb98ae-6294-11ed-aea3-e0d045eabdf7/lio_sam_featureExtraction-4*.log
[lio_sam_mapOptmization-5] process has died [pid 5266, exit code 127, cmd /home/zhaopujun/catkin_ws/devel/lib/lio_sam/lio_sam_mapOptmization __name:=lio_sam_mapOptmization __log:=/home/zhaopujun/.ros/log/accb98ae-6294-11ed-aea3-e0d045eabdf7/lio_sam_mapOptmization-5.log].
log file: /home/zhaopujun/.ros/log/accb98ae-6294-11ed-aea3-e0d045eabdf7/lio_sam_mapOptmization-5*.log
我是第二天早晨跑了一下就没有这个问题了,真是玄学,好多问题第二天莫名其妙解决,我佛了!
2.
make[2]: *** 没有规则可制作目标“/usr/lib/x86_64-linux-gnu/libGL.so”,由“/h............
locate libGL.so
sudo cp 源文件位置/libGL.so 目标文件位置/tips:
在/usr/lib/x86_64-linux-gnu/ 下 ls命令,可查看是否存在libGL.so,若存在且显示为红色,则动态链接出现问题,参考:http://www.kaotop.com/it/643497.html![]() http://www.kaotop.com/it/643497.html
http://www.kaotop.com/it/643497.html















 1067
1067











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









