







前言
抛开算法层面不谈,要利用PCL库中PCLVisualizer可视化类,显示出不同模型并对模型做出不同渲染,制作出丰富的可视化效果以增强自己应用的功能。下面将对如何添加立方体模型和圆球模型到视窗并渲染进行一个大概描述。
代码
//向视窗添加点云并渲染点云尺寸
viewer->addPointCloud(cloud, "bunny");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_FONT_SIZE, 1, "cloud");
//向视窗添加一个立方体模型并渲染,只显示线框。若不要显示线框将下面一行代码注释即可。
viewer->addCube(0.1, 0.2, 0.1, 0.2, 0.1, 0.2);
viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_REPRESENTATION, pcl::visualization::PCL_VISUALIZER_REPRESENTATION_WIREFRAME,"cube");
//向视窗添加一个立方体模型并渲染,透明显示。若不要透明显示将下面一行代码注释即可。
viewer->addSphere(cloud->points.at(0), 0.1, 1, 1, 1);
viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_OPACITY, 0.3, "sphere");说明:这些类的成员函数都做过多次重载,具体使用方法请查阅pcl的参考文档或查看源码。
显示效果
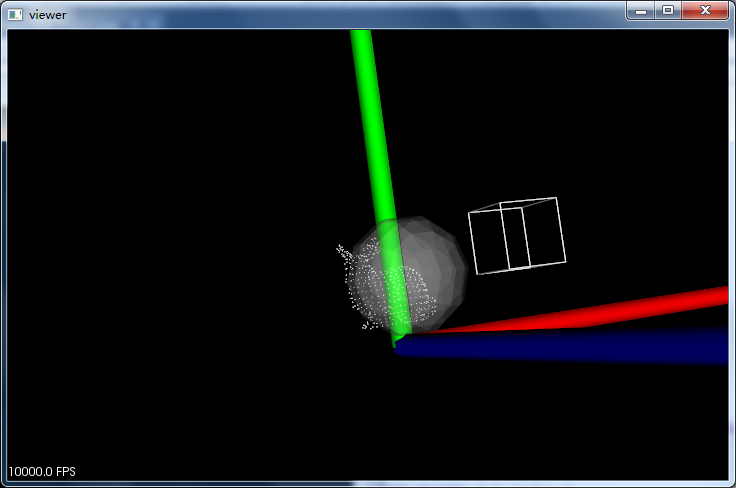
添加到自己应用中的效果如下:

















 1616
1616

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









