





在智能驾驶相关功能测试中,都是从测试条件、测试系统安装与配置,测试流程及测试是否通过的KPI几个方面来看。
测试条件
其中测试条件包含测试环境条件、测试道路条件、测试车辆条件等方面。
测试环境条件:
a) 测试地点应在平坦、干燥的沥青或混凝土表面。
b) 温度范围应是10±30℃。
c) 测试地点的可见车道标记应处于良好状态,符合国家规定GB-5768,需要的请联系小编(微信 zhijiashexiaoming)。的可见车道标记。同时,应按照适用的车道标记设计和材料标准进行标记。
d) 水平可视范围应大于1公里。

测试道路条件:
测试路线应设置如ISO-17361中系统需要中为相关等级规定的最小曲率半径的±10 %范围内。测试路线应足够长,以保持最低车速(I级为17米/秒,II级为20米/秒),允许以0 < V ≤ 0.8米/秒的偏移率漂出车道。
测试车辆条件:
测试车辆的质量应介于整车重量加上驾驶员和测试设备(驾驶员和测试设备的总质量不应超过150公斤)和最大授权总质量之间(见ISO 15037)。一旦测试程序开始,就不得进行任何改动。
注1:整车重量包括润滑油、冷却液、清洗液、燃料、备胎、灭火器、标准备件、卡盘和标准工具箱。
注2:授权的最大总质量由行政当局确定为最大值。
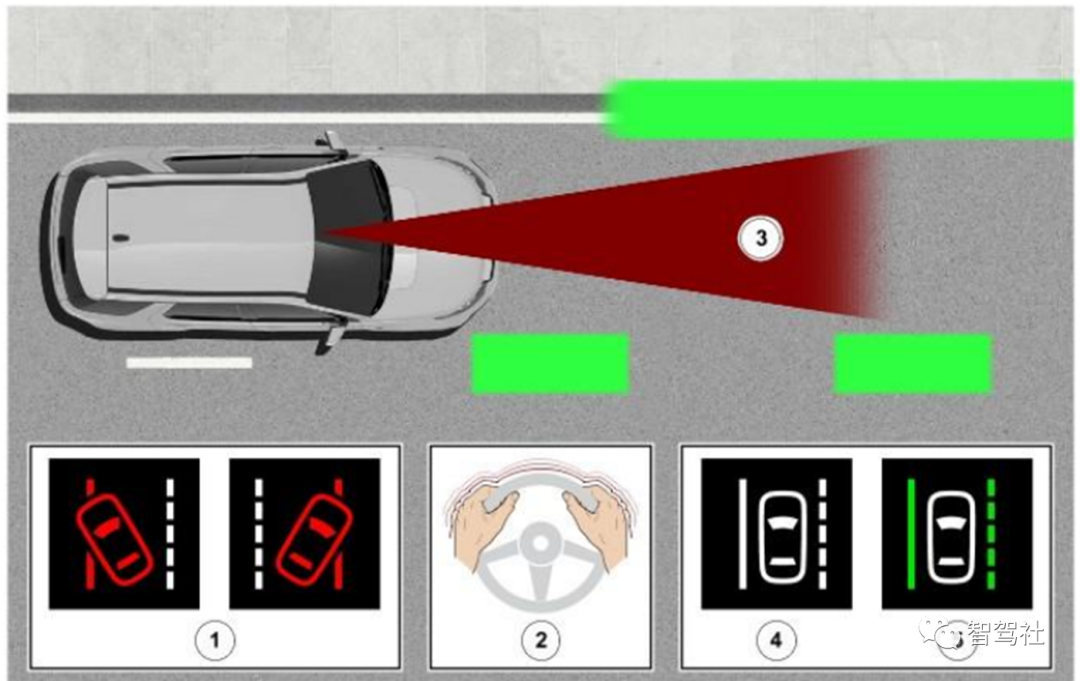
测试系统安装与配置:
LDWS应按照OEM提供的说明进行安装和配置。对于带有用户可调整的预警阈值的LDWS的测试,每次测试应进行两次:一次是预警阈值的最早设置,另一次是预警阈值的最晚设置。一旦测试程序开始,就不得对系统进行任何改动。
测试流程:
可从数据记录中恢复的参数:
以下参数可从数据记录中恢复:
a) 预警问题点
b) 偏离的速度
c) 车辆速度
测试过程中发生的所有预警都应被记录下来。数据应通过系统以外的设备进行恢复。测试设备的精度应在测试报告中注明。
流程:
测试过程一般分为预警触发测试、重复测试及预警失效测试。
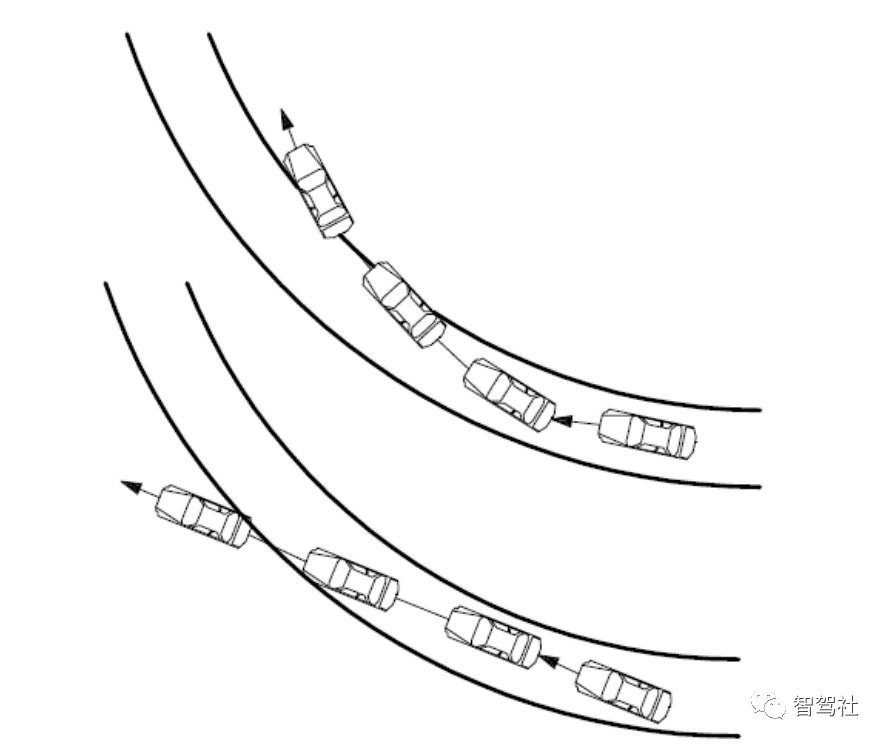
预警触发测试:
车道内的起点位置应在车道的大约中心位置。
车辆进入车道并顺利跟踪,使车辆姿态稳定后,车辆应在赛道内外缓缓漂移,同时根据曲线分类以20米/秒至22米/秒的速度(I级)和17米/秒至19米/秒的速度(II级)驶入曲线。车辆应在右侧和左侧的弯道上,在两个离去率范围内(0至0.4米/秒和0.4米/秒至0.8米/秒)向左右两边离去一次,总共有8次离去,如ISO-17361 LDW系统设计需求及下图所示。
| 偏离率(m/s) | 右侧弯道 | 左侧弯道 | ||
| 左侧偏离 | 右侧偏离 | 左侧偏离 | 右侧偏离 | |
| 0->0,4 | 一次试验 | 一次试验 | 一次试验 | 一次试验 |
| 0,4->0,8 | 一次试验 | 一次试验 | 一次试验 | 一次试验 |
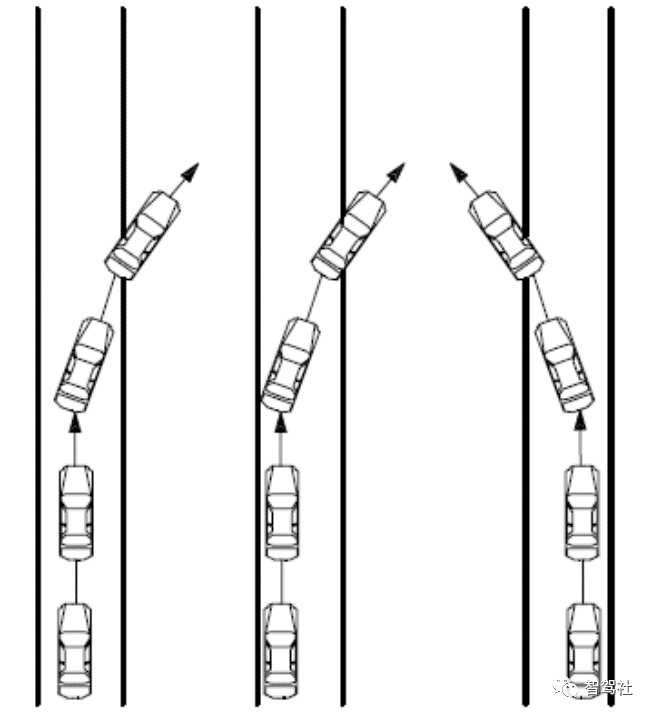
重复性试验
重复性测试应在一段直路上进行。车辆将以20米/秒至22米/秒的速度沿直线行驶。当沿直路段直行时,车辆可在车道中央行驶,也可沿车道线行驶,而车道线则与偏离车道时要越过的车道标线相反。例如,当向右偏离车道时,车辆可沿左侧车道线行驶,反之亦然,如下图所示。在保持相关级别的规定速度,车辆平稳地跟踪路线,使其姿态稳定的情况下,车辆应转向,以0.1米/秒<V1+0.05<0.3米/秒的速度从车道上缓缓驶出,进行8次测试,4次向左(第1组),4次向右(第2组)。右边(第2组),并以0.6米/秒<(V2±0.05)≤0.8米/秒的速度进行另外8次测试[左边4次(第3组),右边4次(第4组),这样总共进行了16次测试。V1和V2由OEM选择。测试人员应根据表4中给出的偏离率公差,进行车道偏离试验,直到每组中达到四个试验。
| 偏离率(m/s) | 偏离方向 | |
| 左侧 | 右侧 | |
| 0,1 < (V1 ± 0,05) ≤0,3 | 组1测试四次 | 组2测试4次 |
| 0,6 < (V2 ± 0,05) ≤ 0,8 | 组3测试四次 | 组4测试4次 |
预警失效测试:
在无警告区内行驶时,系统应在直道上总距离为1000米的范围内不发出任何警告(可分一个1000米的路段或两个500米的路段进行)。
测试评价
预警生成测试:
系统应在跨越最晚的预警线之前提供预警,但在跨越每个测试案例的最早的预警线之前不提供警告。
可重复性测试:
系统应在每个测试组的宽度为30厘米的区域内发出预警。在预警阈值放置区之外不应发出预警。如果一个特定的测试组在规定的速度容许范围内包括四个以上的试验,只考虑在规定速度容许范围内的前四个试验。
预警错误的试验:
在两条最早的警告线之间不应出现警告。
备注:
根据GB 5768-2009 中国道路相关参数如下:
中国 - 车道边界相关参数
车道宽度应在3.0米和3.75米之间。
车道边界的宽度应该是10厘米、15厘米或20厘米。
中断标志线应该是
⎯ 4米(段)+6米(空),用于相反方向。
⎯ 2米(段)+4米(空),用于城市地区的同一方向。
⎯ 高速公路上同向为6米(段)+9米(空)。

















 3549
3549

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









