






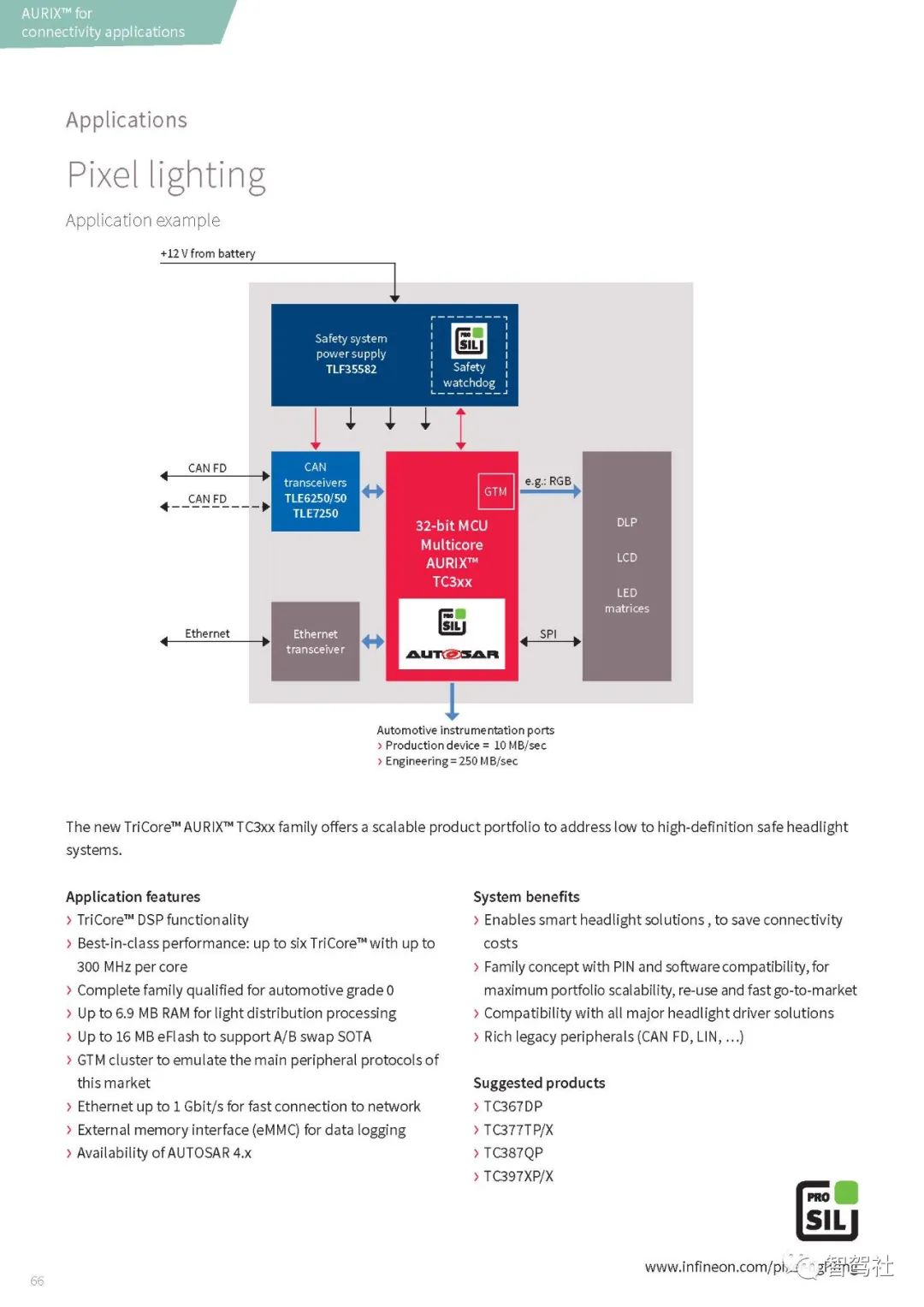
AURIX微控制器TC3xx系列具有高达六核的高性能架构及其在连接性、安全性和功能安全方面的先进特性,非常适合于广泛的汽车和工业应用领域。除了发动机管理和变速器控制外,目标动力总成应用还包括电气和混合驱动的新系统。性能和强大的安全架构的结合使该系列成为支持下一代自动驾驶的领域控制和数据融合应用的理想选择,同时也是目前底盘域、动力域的理想选择。
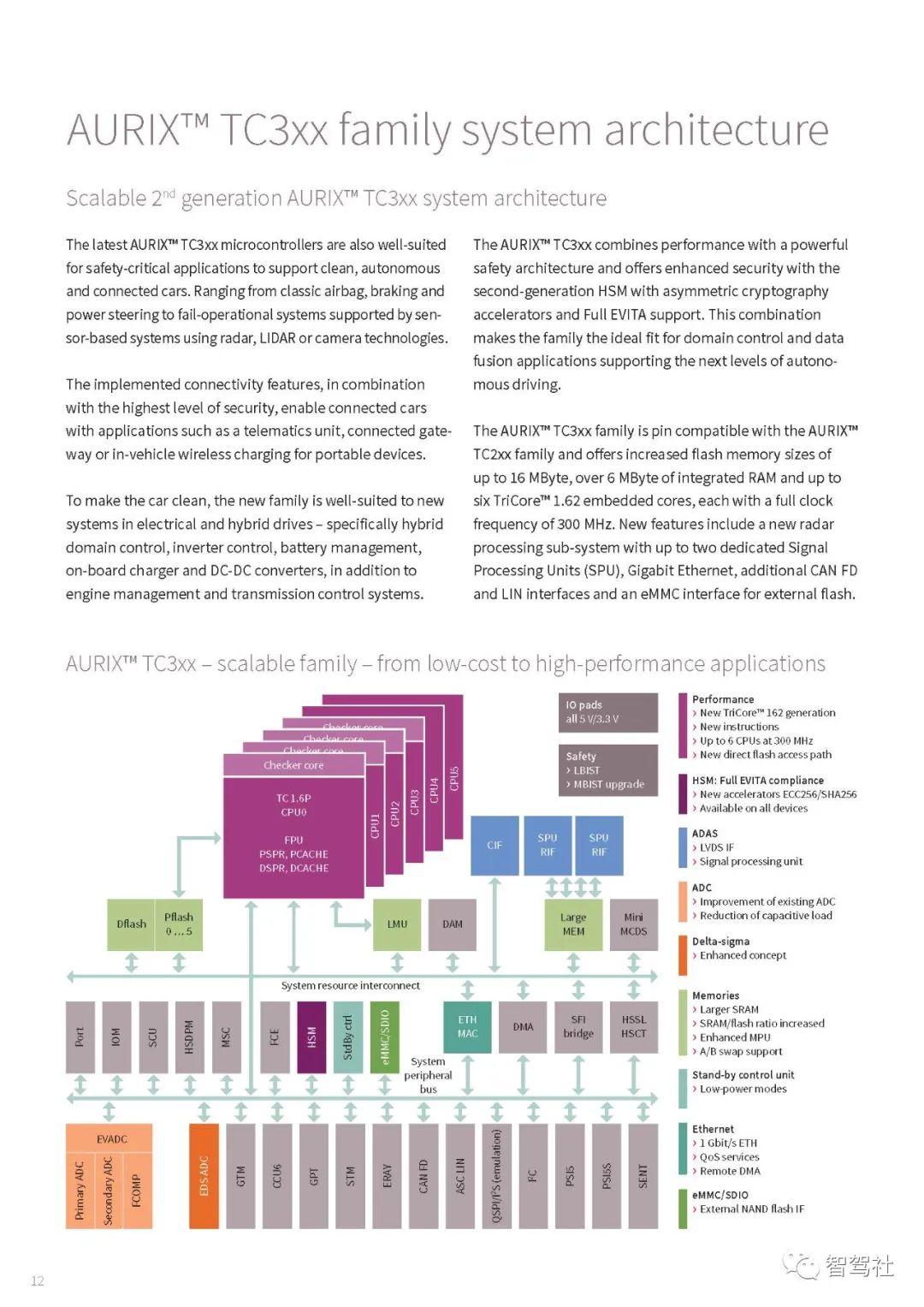
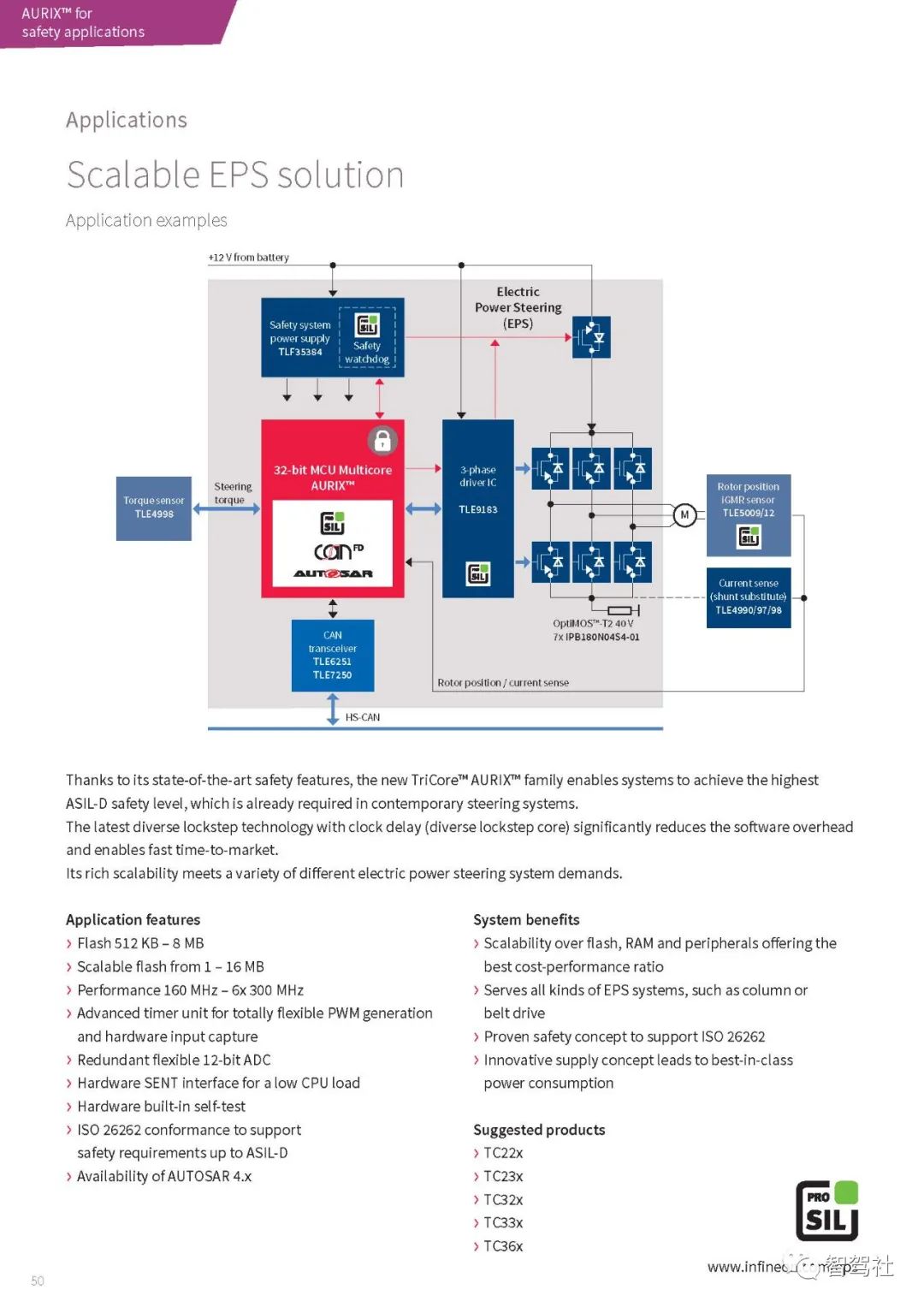
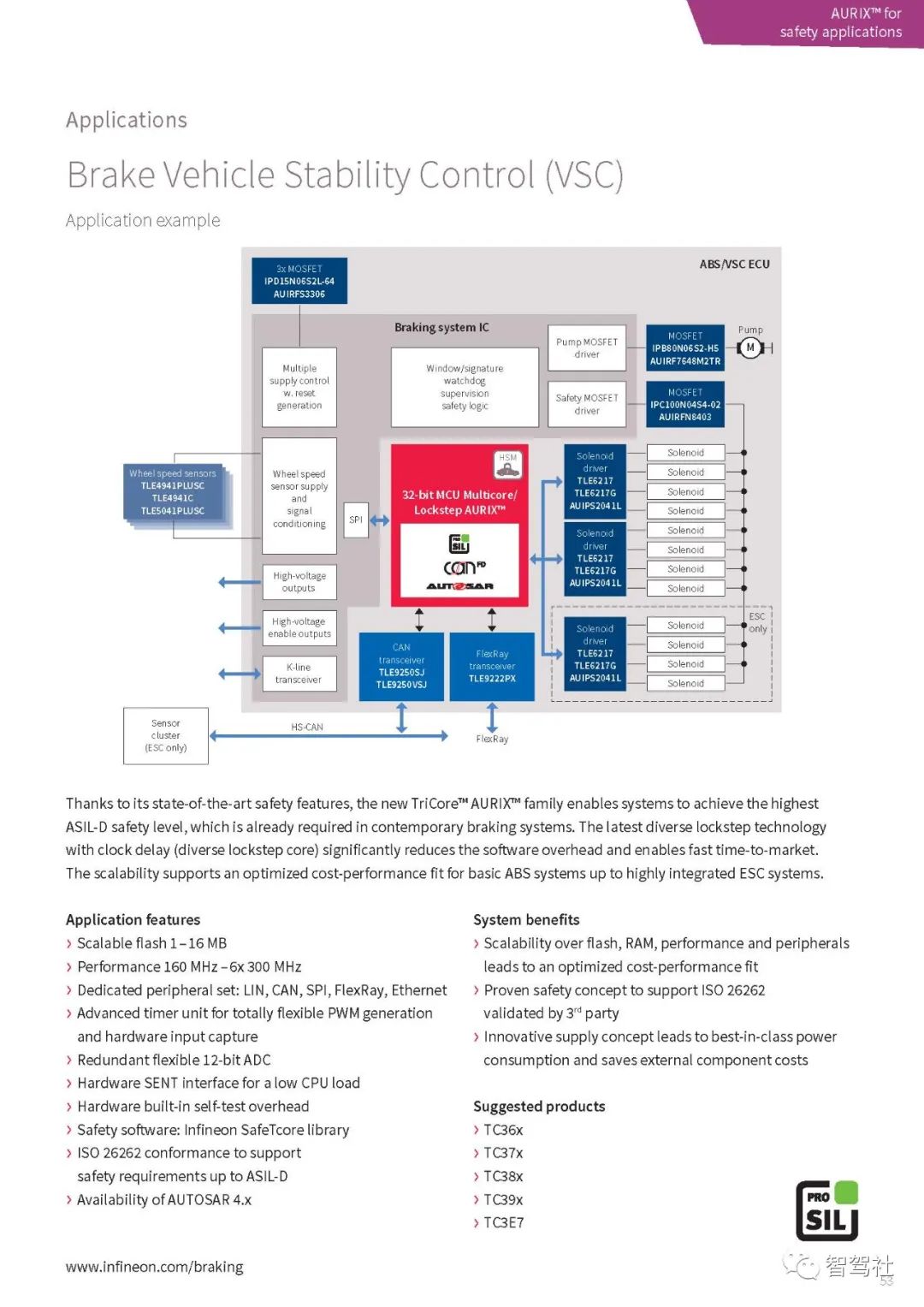
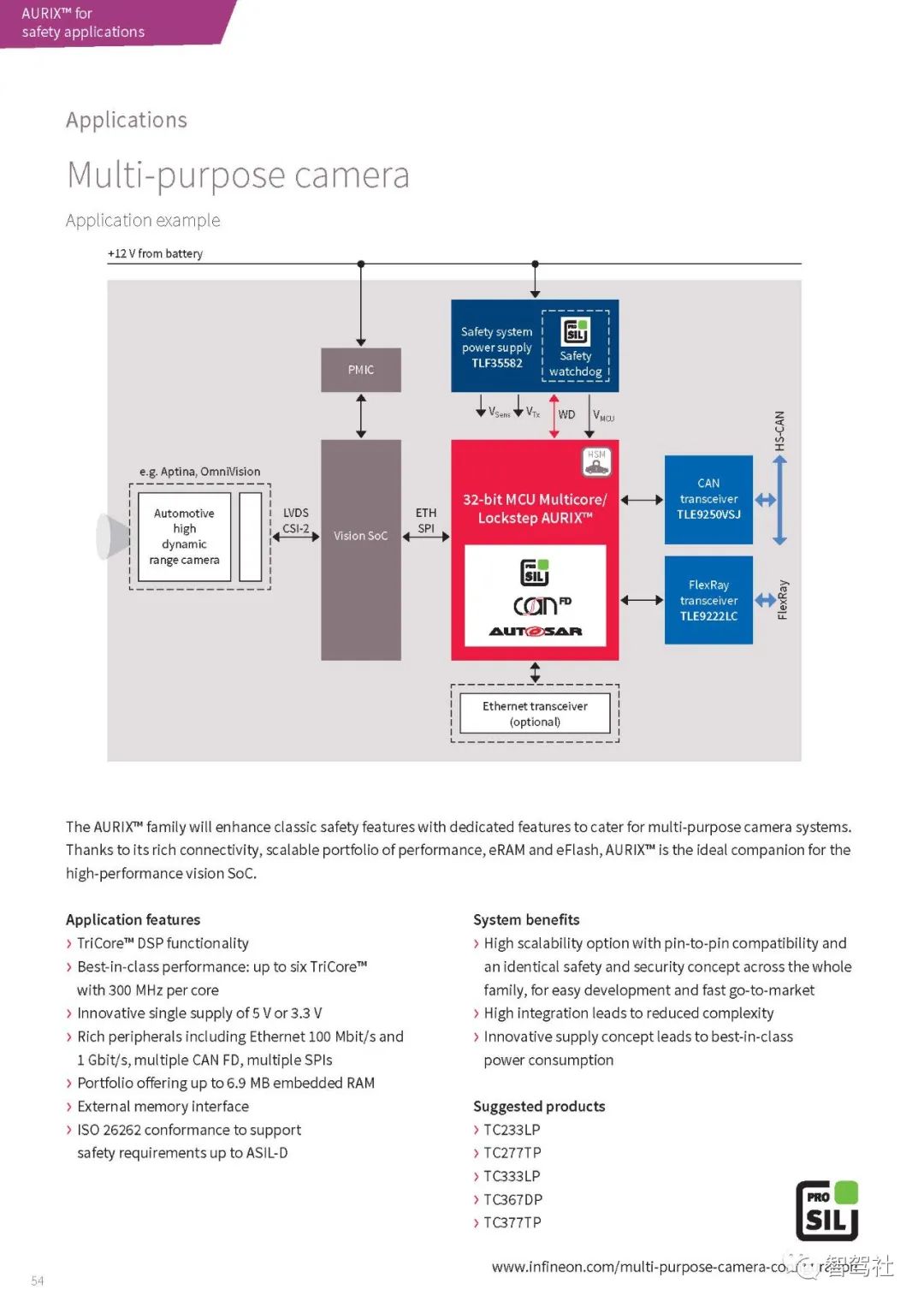
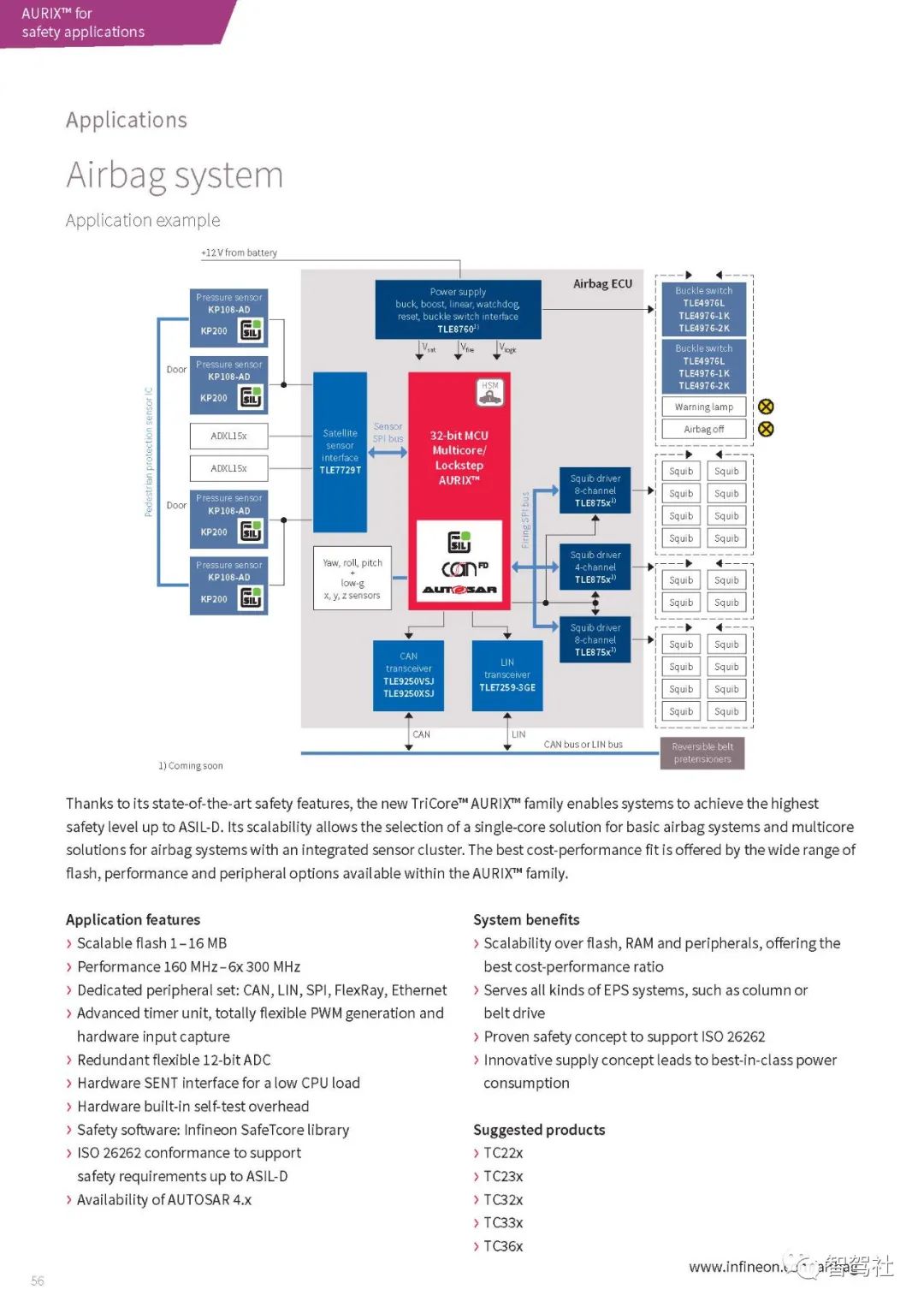
最新的AURIX TC3xx微控制器也非常适合安全关键型应用,以支持清洁、自主和联网汽车。从传统的安全气囊、制动和动力转向,到使用雷达、激光雷达或凸轮技术的基于传感器的系统支持的故障操作系统。性能和强大的安全架构的结合使该系列成为支持下一层次自动驾驶的领域控制和数据融合应用的理想选择。
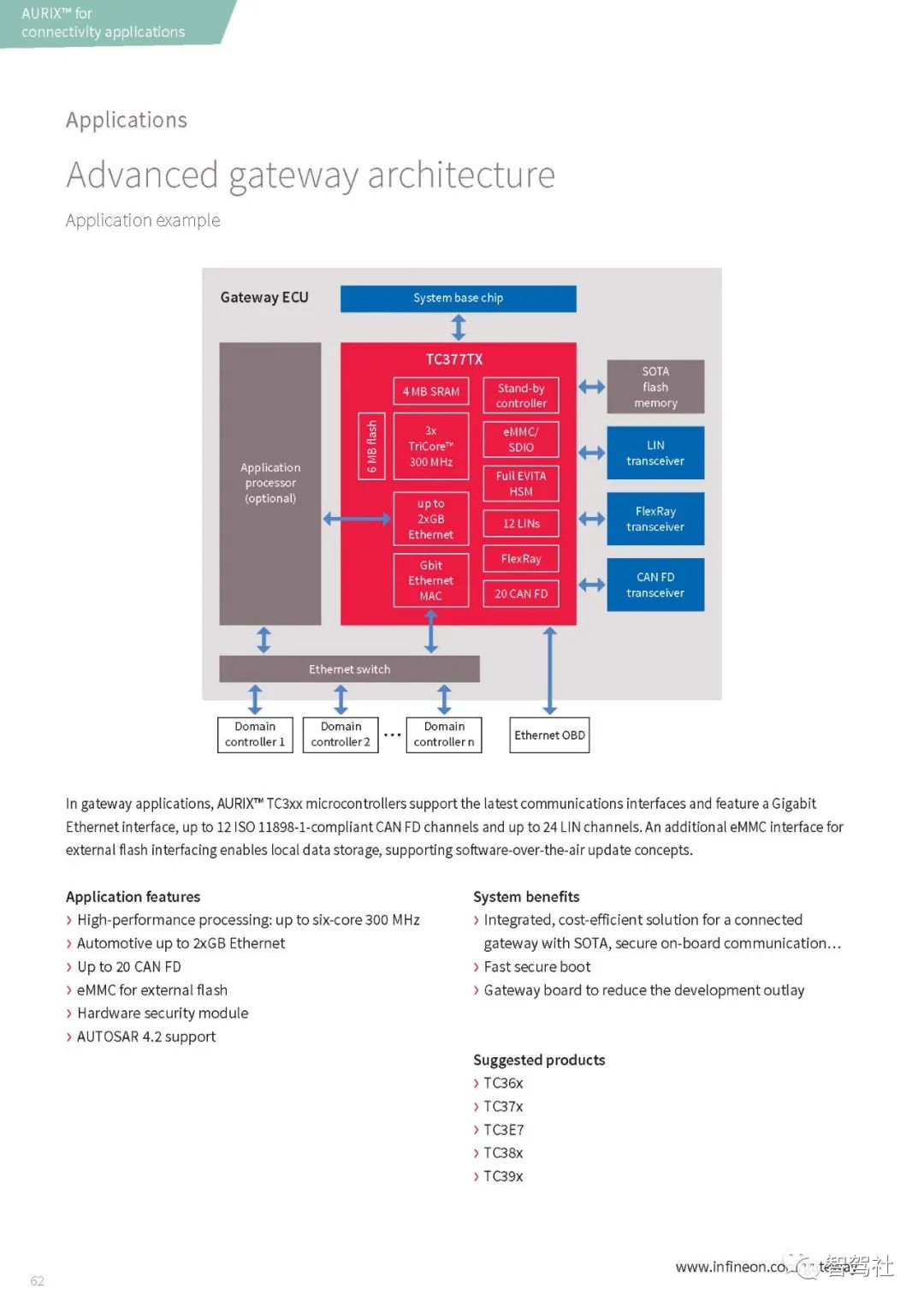
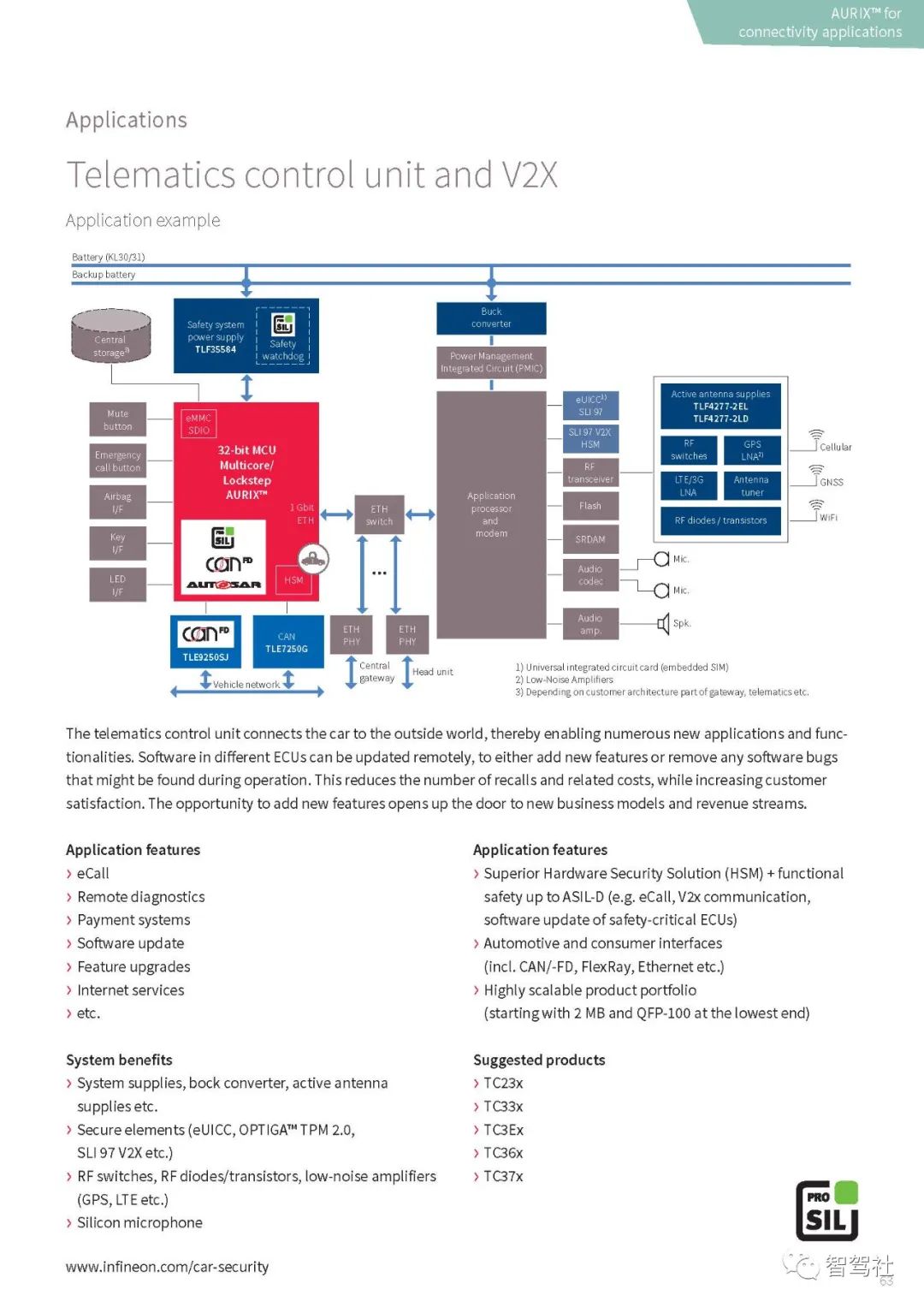
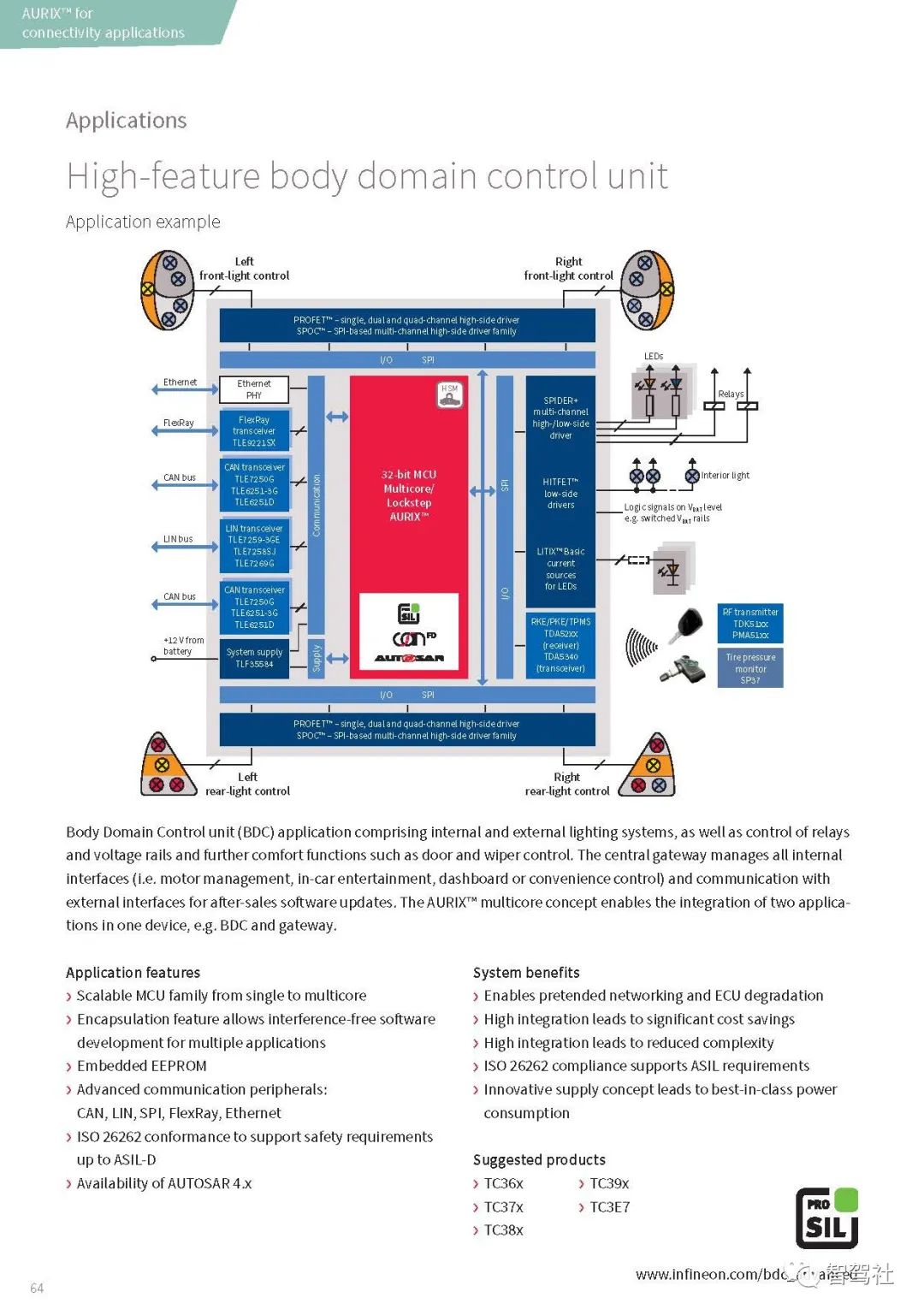
已实现的连接功能与最高级别的安全相结合,使联网汽车的应用成为可能,如远程信息处理装置、联网网关或便携式设备的车内无线充电。
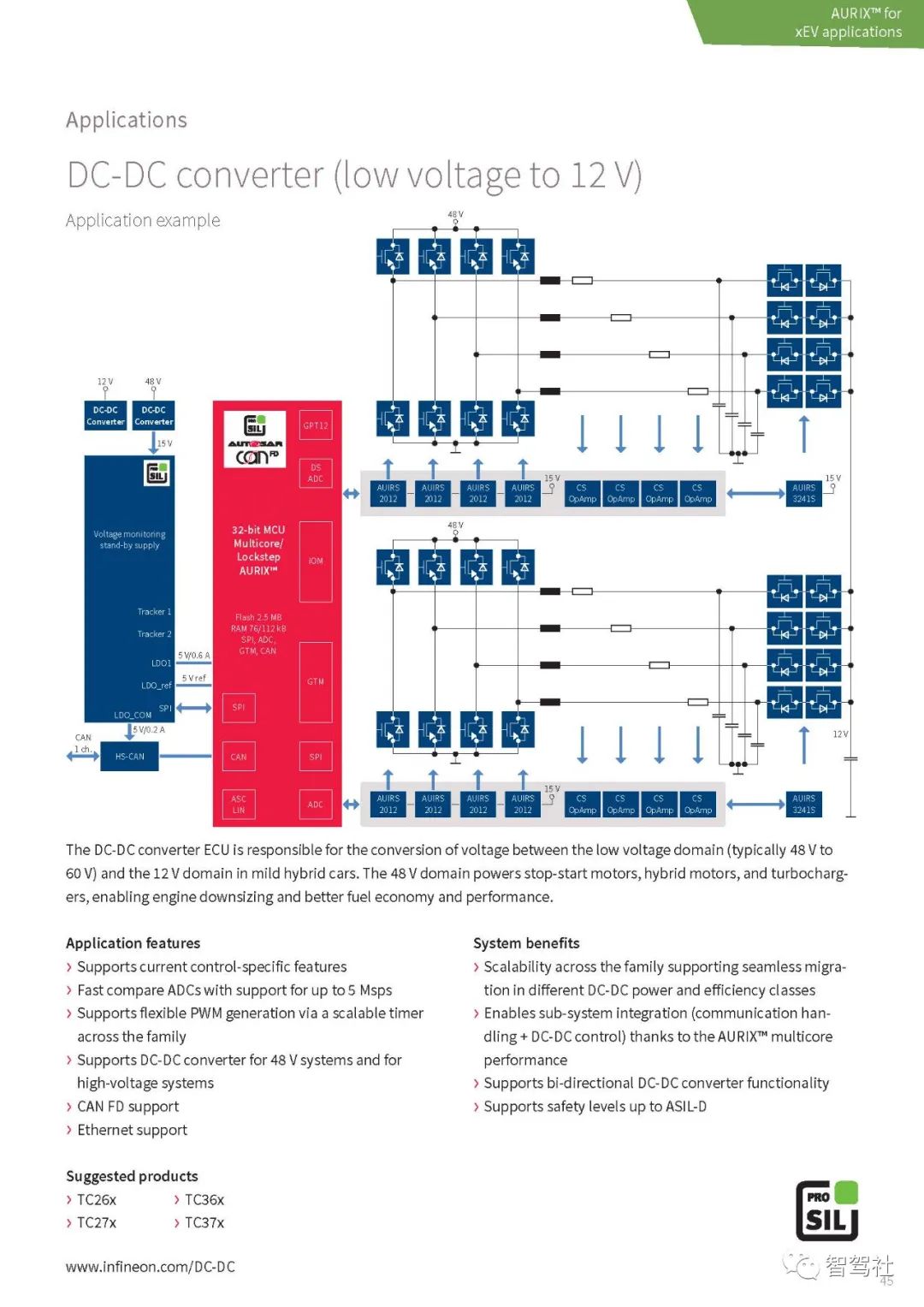
为了使汽车更加清洁,新的系列非常适合于新的系统非电力和混合驱动--特别是混合域控制、逆变器控制、电池管理、车载充电器和DC-DC转换器,此外还有发动机管理和变速器控制系统。
AURIX TC397XM系列是AURIX TC297TT产品的继任者,提供更强的性能,以实现自动驾驶传感器融合应用,该产品是与TTTech Auto合作开发的。
重点不仅放在提高ISO 26262 ASIL-D计算性能能力上,而且还集成了更丰富的外围设备(如12个CAN-FD和以太网Gbit/s)和Full-EVITA HSM,以满足未来传感器融合系统日益增长的安全和安保性能及数据流要求。
该产品与TTTech Auto的MotionWise软件栈相结合,为客户提供高度优化的安全关键应用解决方案。
TC397XM应用特点:
-
6个TriCore™,频率高达300MHz,具有DSP功能
-
所有内核都支持浮点和定点功能
-
高达16MB的闪存,带ECC保护
-
1024 KB EEPROM,500 k周期
-
高达6.9MB的RAM,带ECC保护
-
4x 12位SAR ADC转换器
-
以太网1 Gbit
-
FlexRay, CAN-FD, LIN, SPI
-
冗余和多样化的定时器模块(GTM, CCU6, GPT12)。
-
可编程HSM(硬件安全模块),全EVITA
-
外部存储器接口
-
用于处理器间通信的高速串行接口(HSL)。
-
高速跟踪端口2.5Gbit/s
-
单一电压供应5V或3.3V
最创新的安全:
-
具有时钟延迟的多样化锁步核心
-
访问许可系统
-
安全管理单元
-
安全DMA
-
LBIST(逻辑内置自检)和SBST(基于软件的自检)用于非锁步内核
-
I/O、时钟、电压监控
-
按照ISO 26262/IEC61508开发和记录,支持高达ASIL-D/SIL3的安全要求
-
可使用AUTOSAR 4.x
系统的益处:
-
高度集成化,降低了复杂性,大大节省了成本
-
创新的单电源概念带来了最佳的功耗,并减少了外部电源的数量
-
多样化的锁定核心概念使开发工作减少
-
支持ISO 26262,如自动紧急制动
-
高速跟踪端口可以降低对集成RAM的要求,减少汽车仪表视觉的消耗
-
通过AURIX™和AURIX™ TC3xx系列之间的类似架构,可轻松从带有MotionWise解决方案的AURIX™ TC297TT迁移,实现可扩展的传感器融合组合。
MotionWise安全软件平台的系统优势:
-
更短的上市时间
-
可扩展的安全软件平台,用于自动驾驶,最高可达5级
-
任何供应商的软件组件的无缝集成
-
对AUTOSAR的全面支持
-
提供高级工程服务
目标应用:自动驾驶和ADAS
-
传感器融合与全功能传感器融合:新的TriCore AURIX TC39xTT系列提供了一个可扩展的产品组合,以满足低分辨率网格融合应用以及传感器融合应用的需求,从独立的物体融合到高端AD ECU的陪伴。
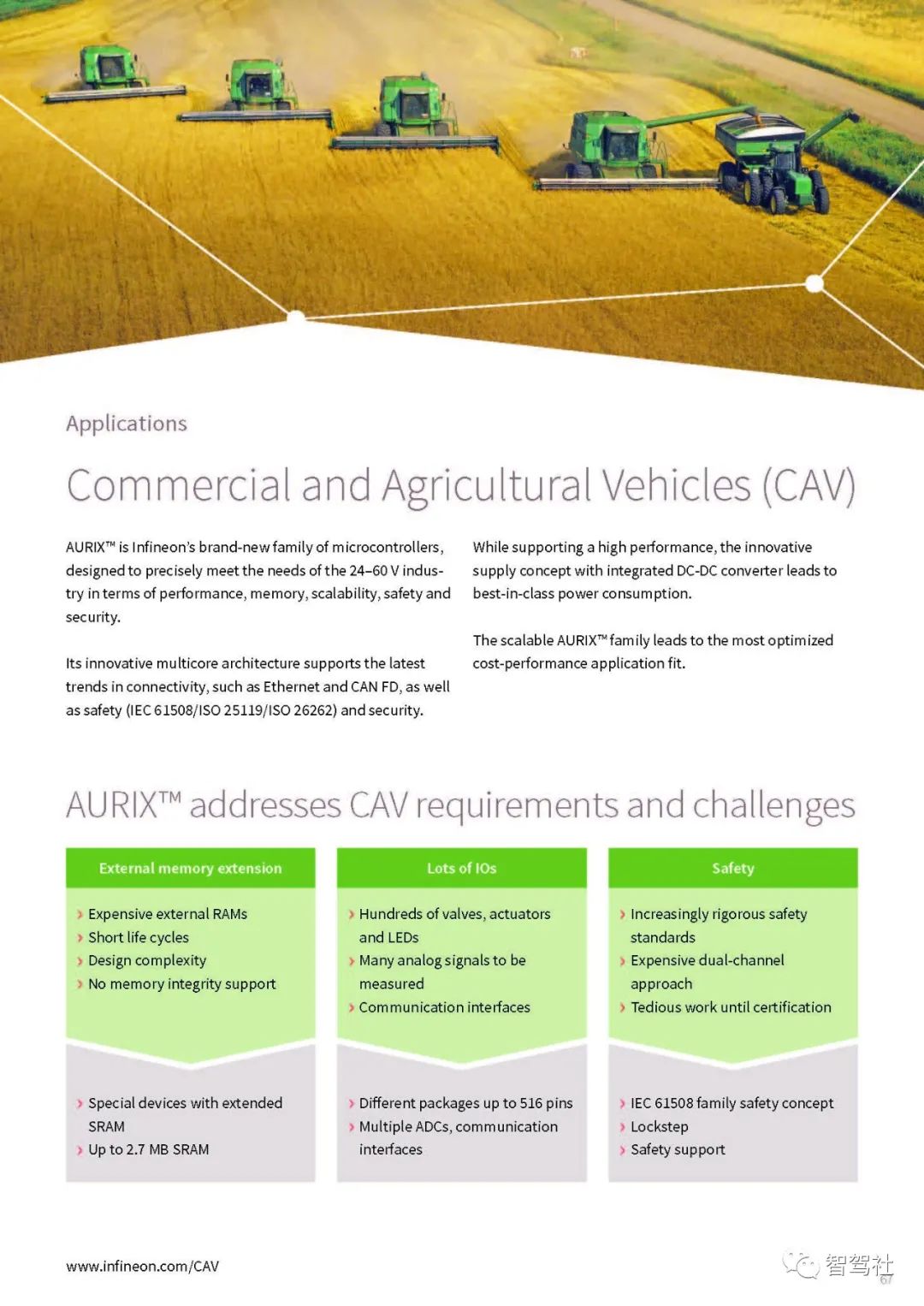
作为半导体和系统解决方案的供应商,英飞凌不断开发创新和高效的解决方案。紧跟商业、建筑和农业车辆(CAV)的最新市场趋势,需要越来越多的生态友好产品和解决方案。特别是对于那些必须以最高的可用性和最低的总拥有成本(TCO)运行的CAV。
半自动和全自动技术使CAV对操作者更安全,同时也更高效和精确。机器可以全天候运行,没有停机时间。拖拉机可以独立导航其周围环境,并根据其收集的数据做出反应。这样的机器简直让完全由人类操作的系统望尘莫及。同时,电气化正成为CAVs的一个越来越有吸引力的选择。制造商依靠电力驱动系统来遵守最新的排放和能源法规。同时,运营商利用电气化来提高加工效率和产量。
![]()
![]()

![]()



![]()
![]()






![]()



![]()




![]()


![]()


![]()

![]()

![]()


![]()


![]()

![]()
![]()
![]()




![]()


![]()
pdf下载地址:
https://download.csdn.net/download/xiaoming0907/82610287
(欢迎申请加入智能驾驶交流学习群,加小编微信号zhijiashexiaoming)
















 3285
3285











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











