







即时定位与地图构建(SimultaneousLocalization AndMapping)指的是机器人在自身位置不确定的条件下,在完全未知环境中创建地图,同时利用地图进行自主定位和导航。
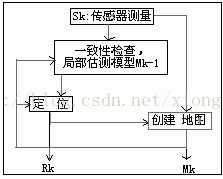
SLAM问题可以描述为:机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和传感器数据进行自身定位,同时建造增量式地图。
(1)定位(localization):机器人必须知道自己在环境中位置。
(2)建图(mapping):机器人必须记录环境中特征的位置(如果知道自己的位置)
(3)SLAM:机器人在定位的同时建立环境地图。其基本原理是运过概率统计的方法,通过多特征匹配来达到定位和减少定位误差的。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3776
3776











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









