







1. 前言
工作中涉及到多种激光雷达的调试和开发,记录一般的调试方法和步骤,避免反复的查找资料
2. ouster激光雷达驱动源码下载
官方地址:github驱动源码
3. 硬件连接
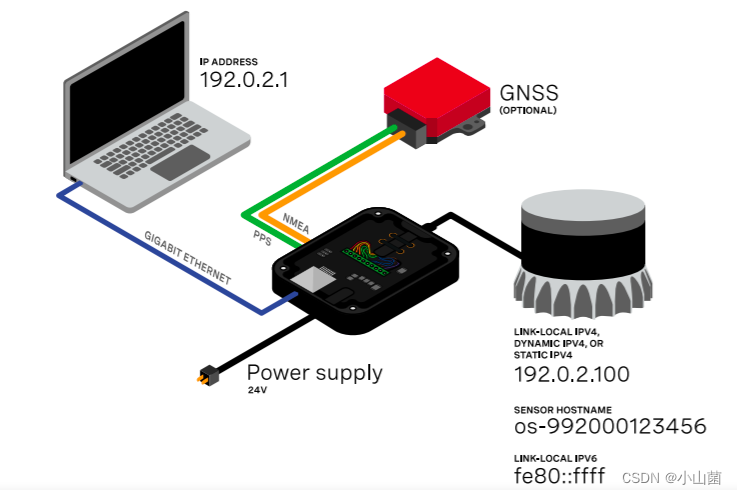
这里采用的是Ouster 128线激光雷达,物理连接完成,并且连接器上的绿灯亮起,可以听到雷达运行发出的声音,说明连接成功。

4. IP配置
4.1 雷达IP获取
雷达ip获取时,需要先关闭无线,并且有线连接方式开启,我这里通过一下两种方式获取雷达ip。
第一种是在终端执行以下命令,得到雷达ip为169.254.17.219
avahi-browse -lr _roger._tcp
效果如下:
+ enp8s0 IPv6 Ouster Sensor 122223001635 _roger._tcp local
+ enp8s0 IPv4 Ouster Sensor 122223001635 _roger._tcp local
= enp8s0 IPv6 Ouster Sensor 122223001635 _roger._tcp local
hostname = [os-122223001635.local]
address = [fe80::be0f:a7ff:fe00:6dee]
port = [7501]
txt = ["fw=ousteros-image-prod-aries-v2.4.0+20220921174636" "sn=122223001635" "pn=840-103575-06"]
= enp8s0 IPv4 Ouster Sensor 122223001635 _roger._tcp local
hostname = [os-122223001635.local]
address = [169.254.17.219]
port = [7501]
txt = ["fw=ousteros-image-prod-aries-v2.4.0+20220921174636" "sn=122223001635" "pn=840-103575-06"]
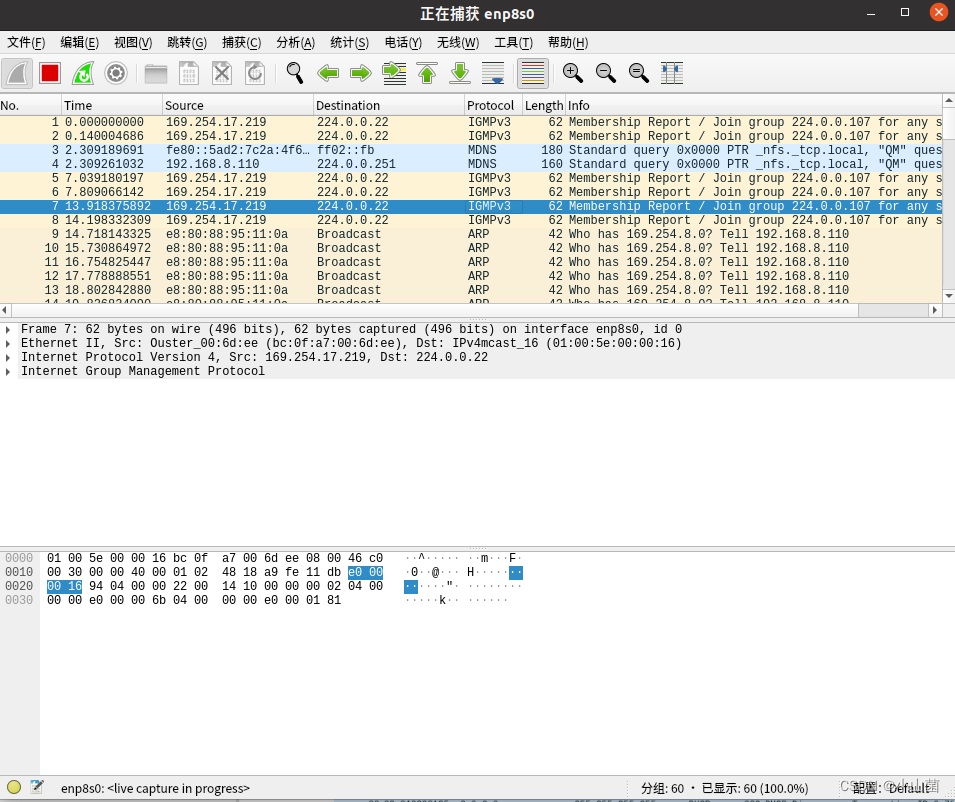
第二种方法,通过抓包工具wireshark获取,一个简单的教程,打开后可以查看连接的ip依然为169.254.17.219
4.2 主机IP配置
主机需设置到手动配置模式,将主机和雷达配准到相同的网段,如下图所示,点击应用之后,再将有线断开重连一下。

5.启动驱动
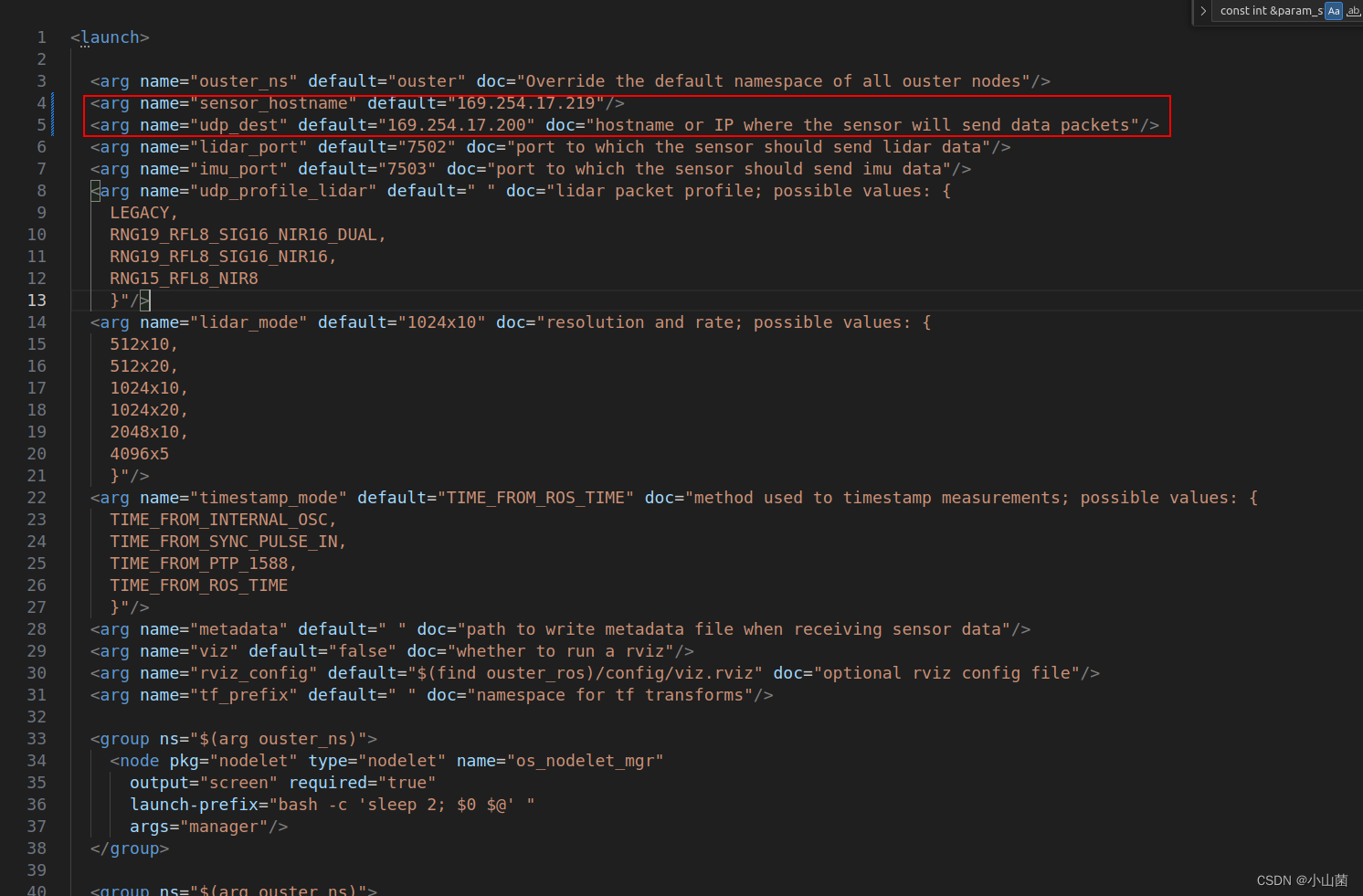
5.1 修改雷达驱动配置参数
5.2编译并启动驱动
编译
catkin build ouster_ros
启动
source devel/setup.bash
roslaunch ouster_ros sensor.launch
终端启动效果

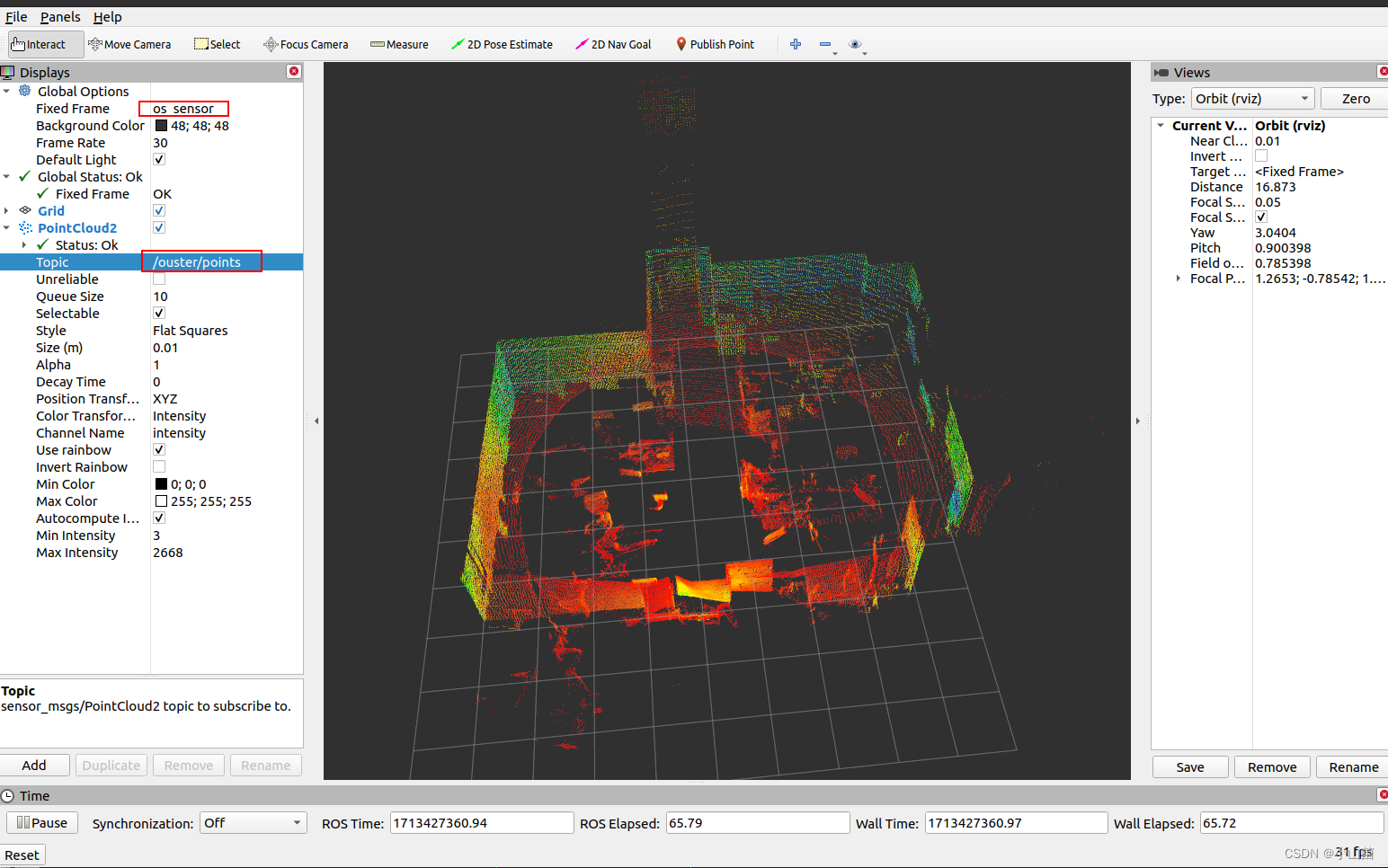
在rviz中添加坐标系和对应消息名称如下,得到点云如下图所示
6.一般问题排查思路
第一种情况:
确保可以ping通,ping不通,此时可能是硬件的物理连接松动,需要紧固接口,另一种是忘记开启有线,检查是否开启有线,
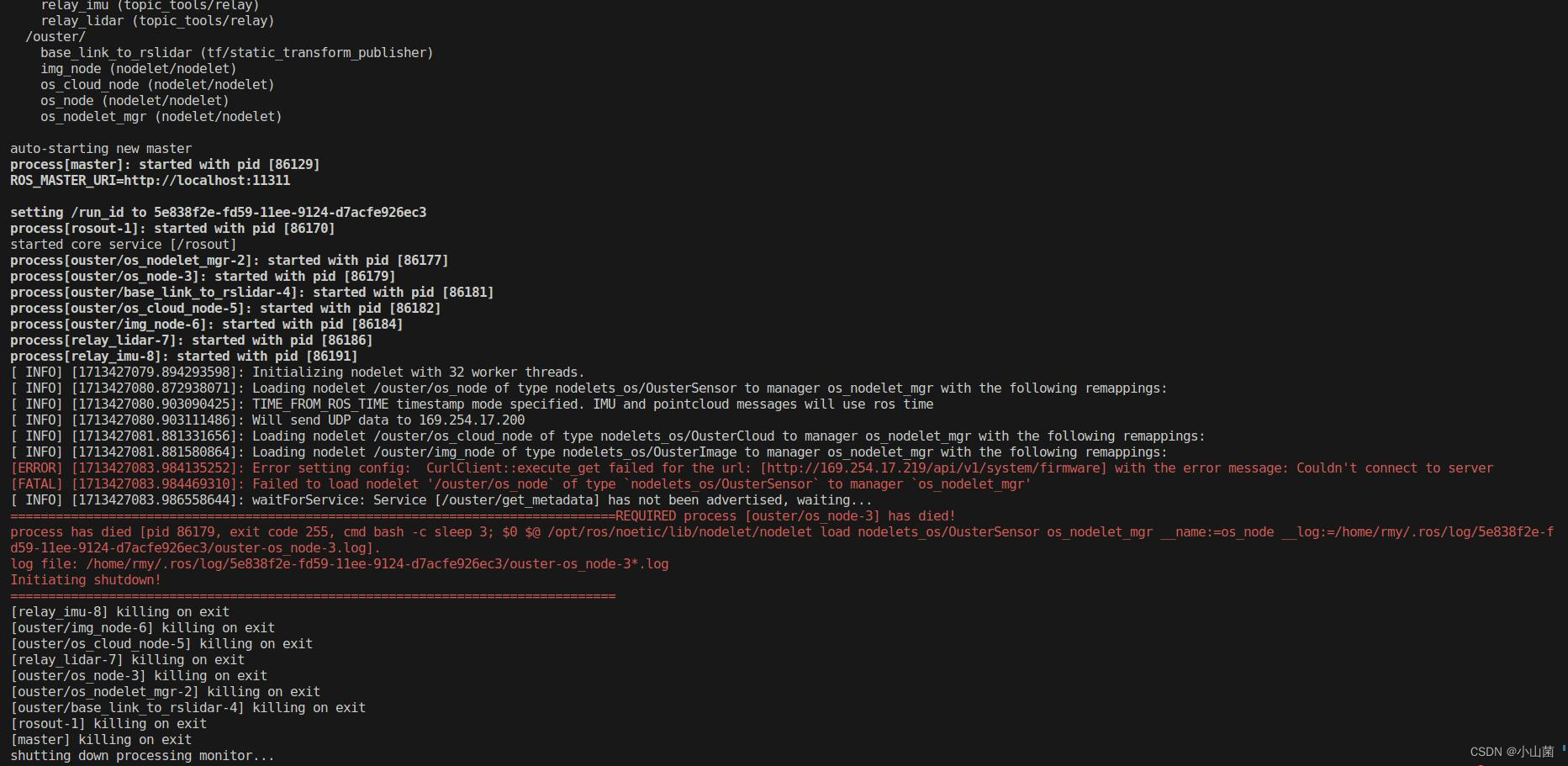
第二种情况:
ping通了,但是驱动无法连接服务器,如下图所示,首先检查5.1中雷达和本地的ip配置是否正确
其它注意事项:
有时候雷达没有进行固定ip操作,物理断开连接线,再次重连后可能会导致ip发生变化。

















 2539
2539

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









