







提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
前言
速腾(RoboSense)激光雷达是一种领先的自动驾驶技术,利用激光束探测周围环境,实现高精度的环境感知和距离测量。其采用独特的多线激光束设计,能够在不同天气和光照条件下稳定工作,实现对车辆周围环境的全方位感知。速腾激光雷达具有高分辨率、长探测距离和高可靠性等特点,为自动驾驶汽车提供了重要的感知能力,是实现安全可靠的自动驾驶的关键技术之一。下面介绍如何安装速腾的16线激光雷达的驱动并进行实测的教程。
一、安装雷达的驱动
注意:安装SDK和安装rs_driver根据自己的需要二选一即可,rslidar_sdk是基于 Ubuntu 的速腾激光雷达软件开发包。它包含了:激光雷达驱动核心rs_driver,ROS支持,ROS2支持,要通过 ROS/ROS2 获取点云,使用rslidar_sdk即可,如需要深度进行二次开发,才使用rs_driver。一般安装rslidar_sdk就可以满足一般的使用需求了。
1. SDK的安装
(1) 源码的下载
下载地址:
git clone https://github.com/RoboSense-LiDAR/rslidar_sdk.git
(2) 初始化子模块
进入驱动的文件夹:
cd rslidar_sdk
初始化子模块
git submodule init
git submodule update
(3 ) 编译前的修改
- 打开rslidar_sdk文件夹下的CMakeLists.txt文件,将文件顶部的变量COMPILE_METHOD 改为CATKIN.(默认是CATKIN,可跳过)
- 将rslidar_sdk工程目录下的package_ros1.xml文件复制到package.xml。(也可跳过)
(4) 源码编译
进入工作空间的目录下,打开终端输入:
catkin_make
source devel/setup.bash
2. rs_driver的安装
进行深度二次开发需要,可选项,一般只安装rslidar_sdk即可
(1) 源码的下载
下载地址:
git clone https://github.com/RoboSense-LiDAR/rs_driver.git
(2) 安装依赖
终端输入:
sudo apt-get install libpcap-dev libeigen3-dev libboost-dev libpcl-dev
(3) 源码编译
进入驱动的文件目录:
cd rs_driver
创建build文件夹并进入:
mkdir build && cd build
编译:
cmake .. && make -j4
安装到本机:
sudo make install
二、实测激光雷达
1. 修改配置文件
(1) 设置IP
雷达连接电脑, 创建一个新的网络连接,并将IP地址,设置为雷达的发送的ip
如果不知道雷达的ip,可以参考本人以前的这篇博客抓取激光雷达的ip地址:
ubuntu使用记录——如何使用wireshark网络抓包工具进行检测速腾激光雷达的ip和端口号
插入博客的地址
(2) 参数设置
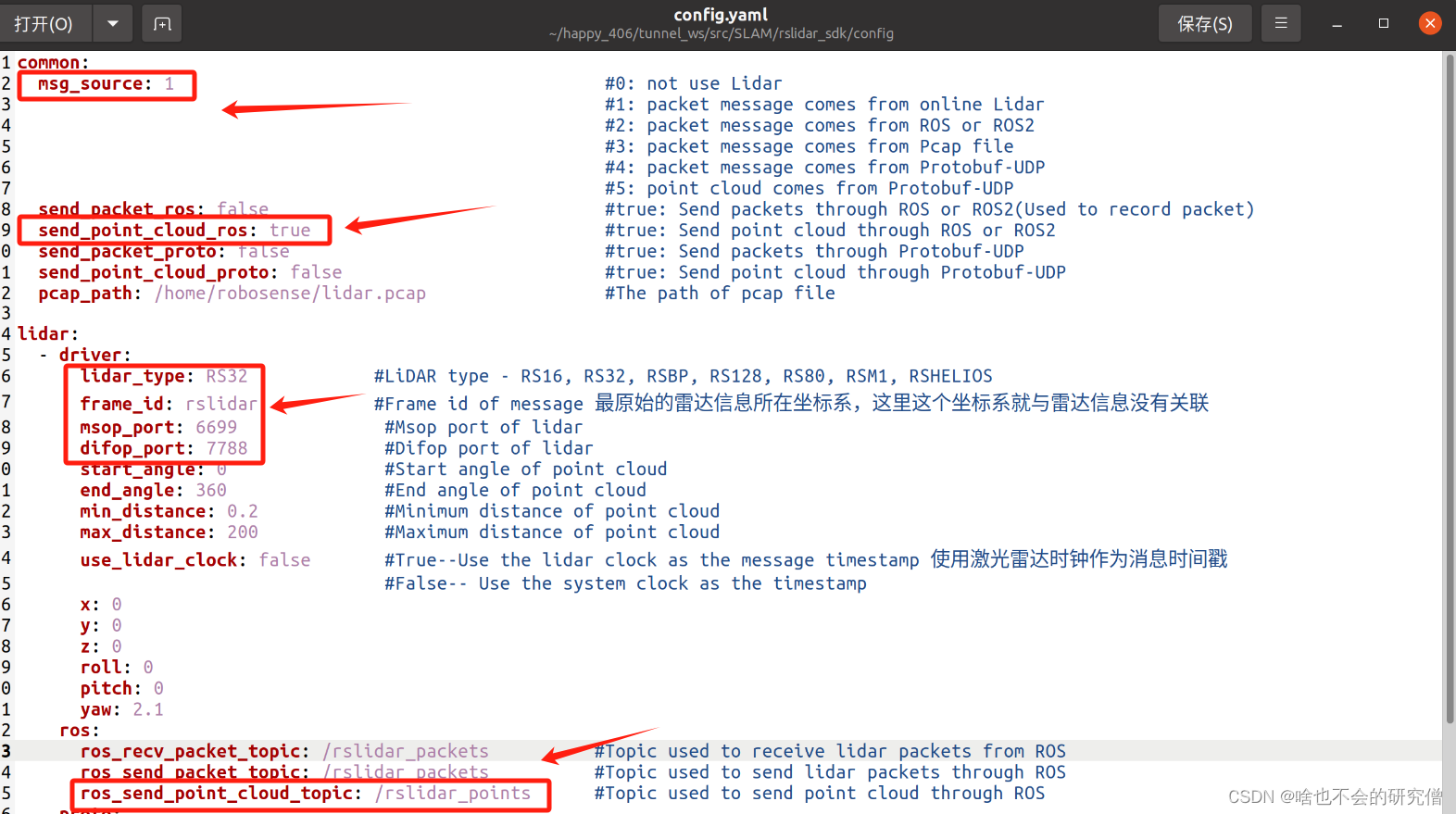
修改config.yaml文件:(其他参数具体参考代码的github官网):
1)消息来源于在线雷达,因此设置为msg_source=1
2)将点云发送到ROS以便查看,
3)因此设置为 send_point_cloud_ros = true
4)将 lidar_type 设置为LiDAR类型 (如RS16)
5)设置 msop_port 和 difop_port 为雷达数据端口号
6)将 ros_send_point_cloud_topic 设置为发送点云的话题
文件参数如下图所示:
2. 运行雷达
完成上述的设置之后,即可实时运行速腾激光雷达:
在工作空间的目录下:
source devel/setup.bash //生效环境
运行激光雷达:
roslaunch rslidar_sdk start.launch //改成自己对应的launch文件
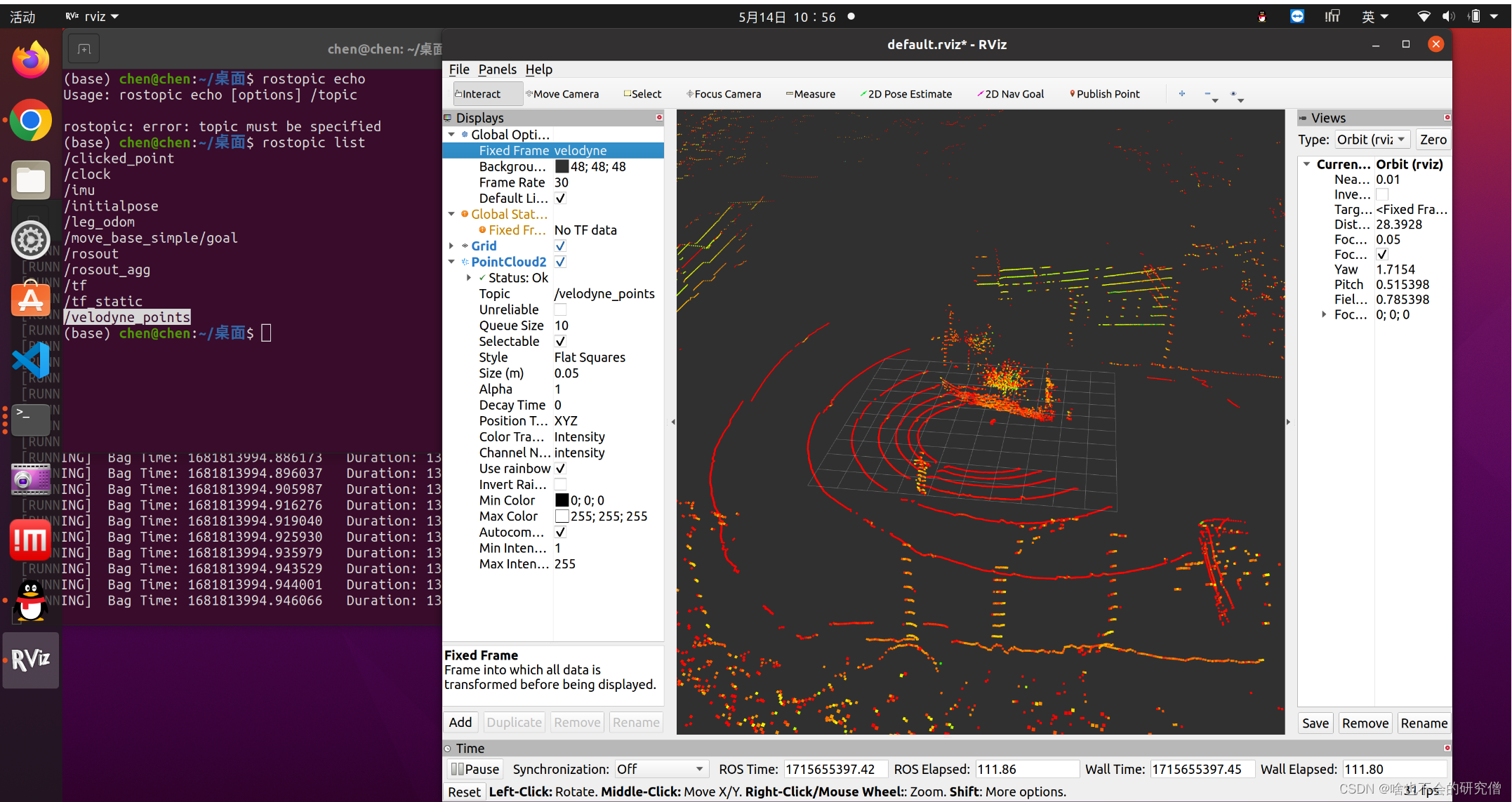
运行的效果如下:
具体如何利用rviz可视化雷达点云数据,具体的操作可以参考我这篇博客:
如何在ubuntu中利用ros自带的rviz工具实时可视化雷达点云的数据
以上就是速腾(RoboSense)激光雷达驱动的安装与实测教程,有什么疑问,可以评论区讨论交流!



















 820
820

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











