







1. 前言
速腾激光雷达驱动调试和ouster激光雷达调试有部分的不同,这里记录在驱动调试过程中涉及的知识点。
2. RoboSens激光雷达驱动源码下载
gitclone直接下载:
git clone https://github.com/RoboSense-LiDAR/rslidar_msg.git
git clone https://github.com/RoboSense-LiDAR/rslidar_sdk.git
3. 硬件连接
基本上和ouster的一样,连接网线盒点云,并且额外连接一个接口。
转接头

连接器,红色对齐

4. IP配置
4.1 雷达IP获取
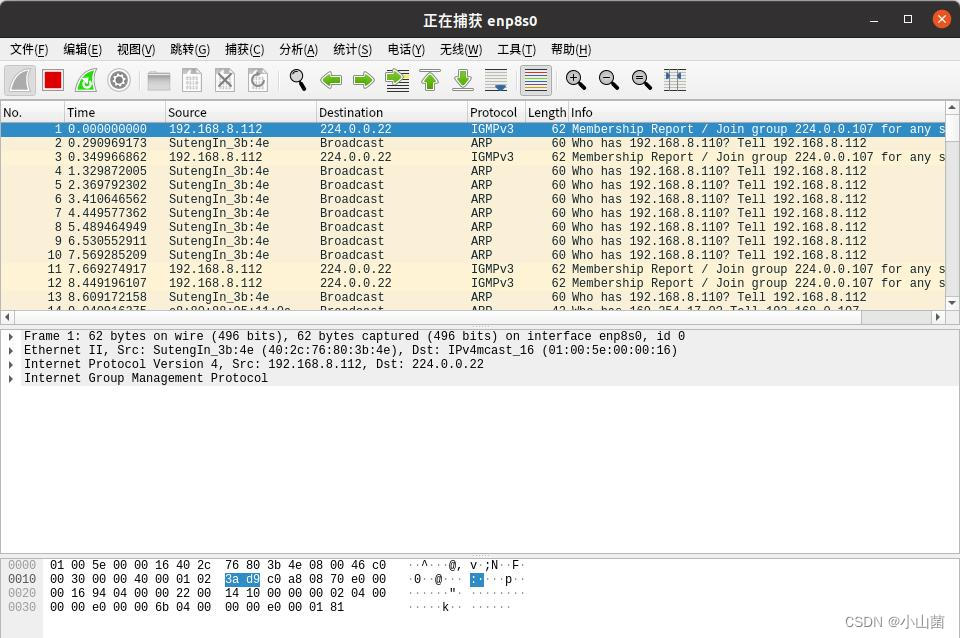
通过抓包工具wireshark获取,一个简单的教程,打开后可以查看连接的ip为192.168.8.112
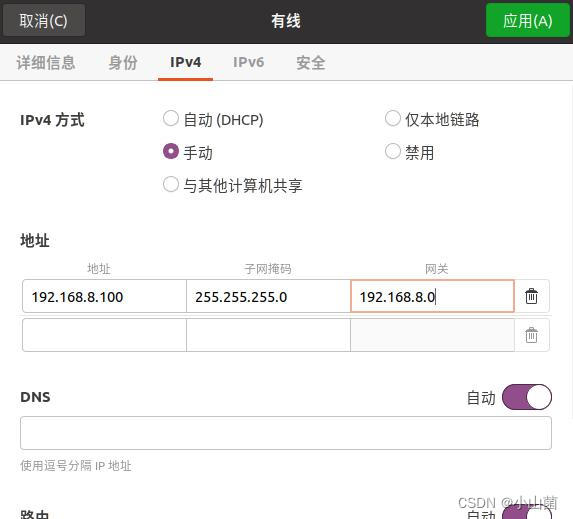
4.2 主机IP配置
主机需设置到手动配置模式,将主机和雷达配准到相同的网段,如下图所示,点击应用之后,再将有线断开重连一下。
5.启动驱动
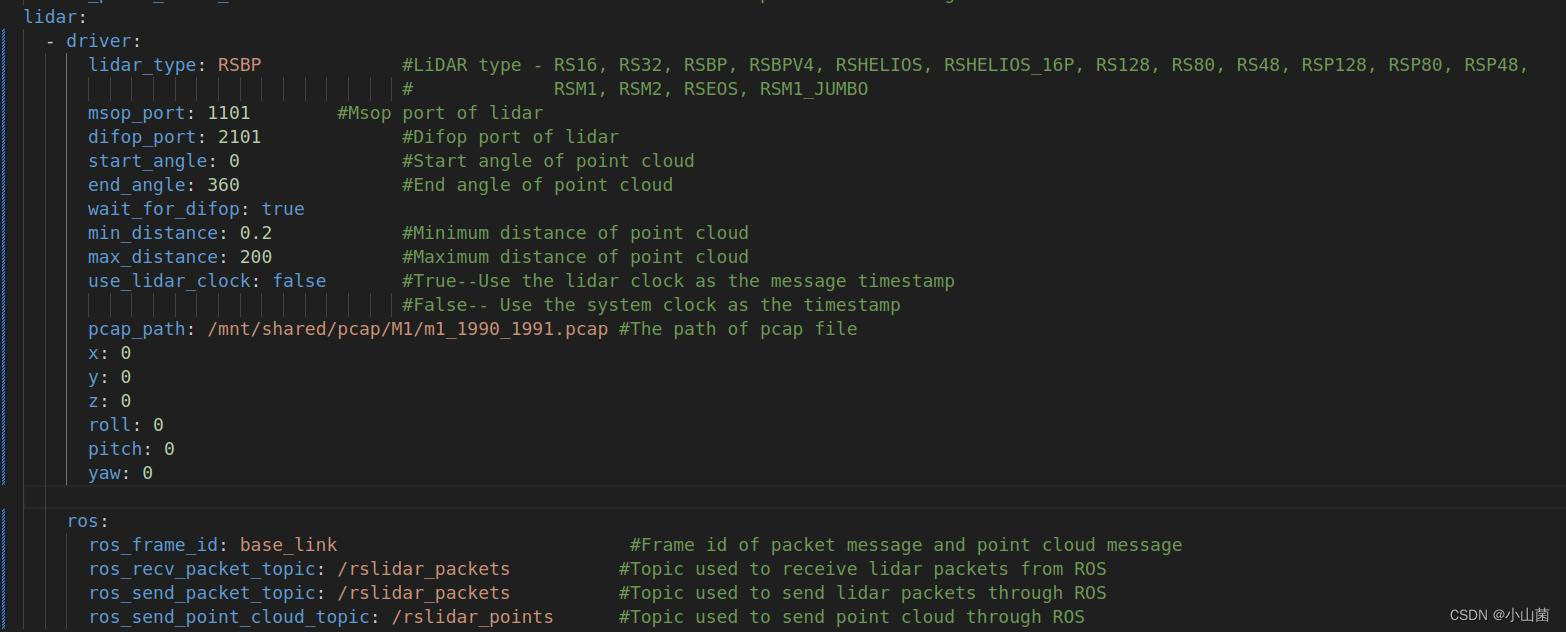
5.1 修改雷达驱动配置参数
修改雷达的类型和对应的串口
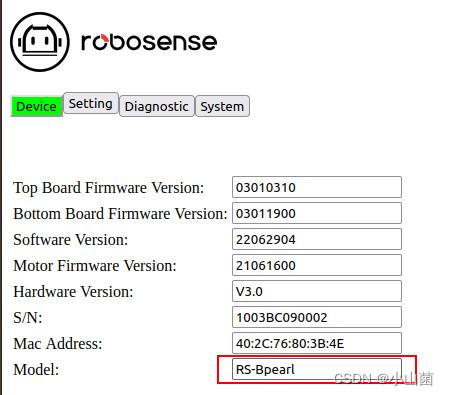
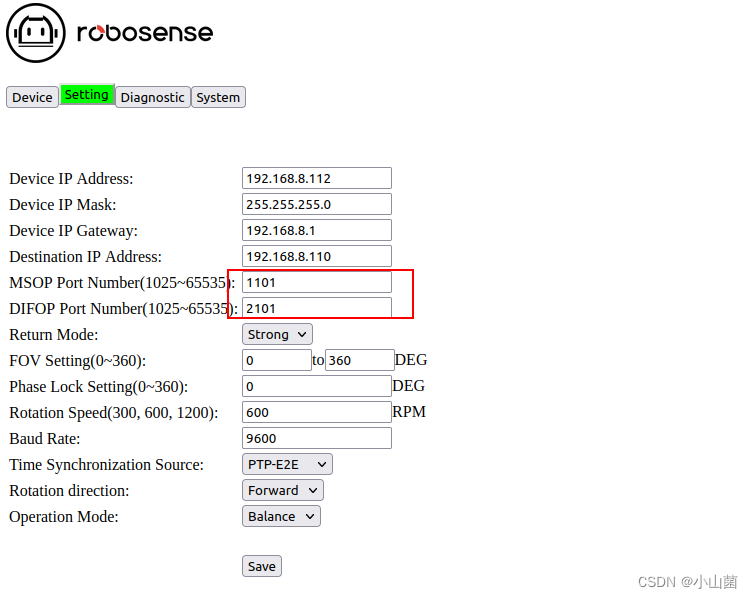
如何查看lidar_type,msop_port和difop_port,打开一个网格,在地址里面输入雷达的ip
lidar_type
msop_port和difop_port
5.2编译并启动驱动
编译
catkin build rslidar_sdk
启动
source devel/setup.bash
roslaunch rslidar_sdk start.launch
终端启动效果

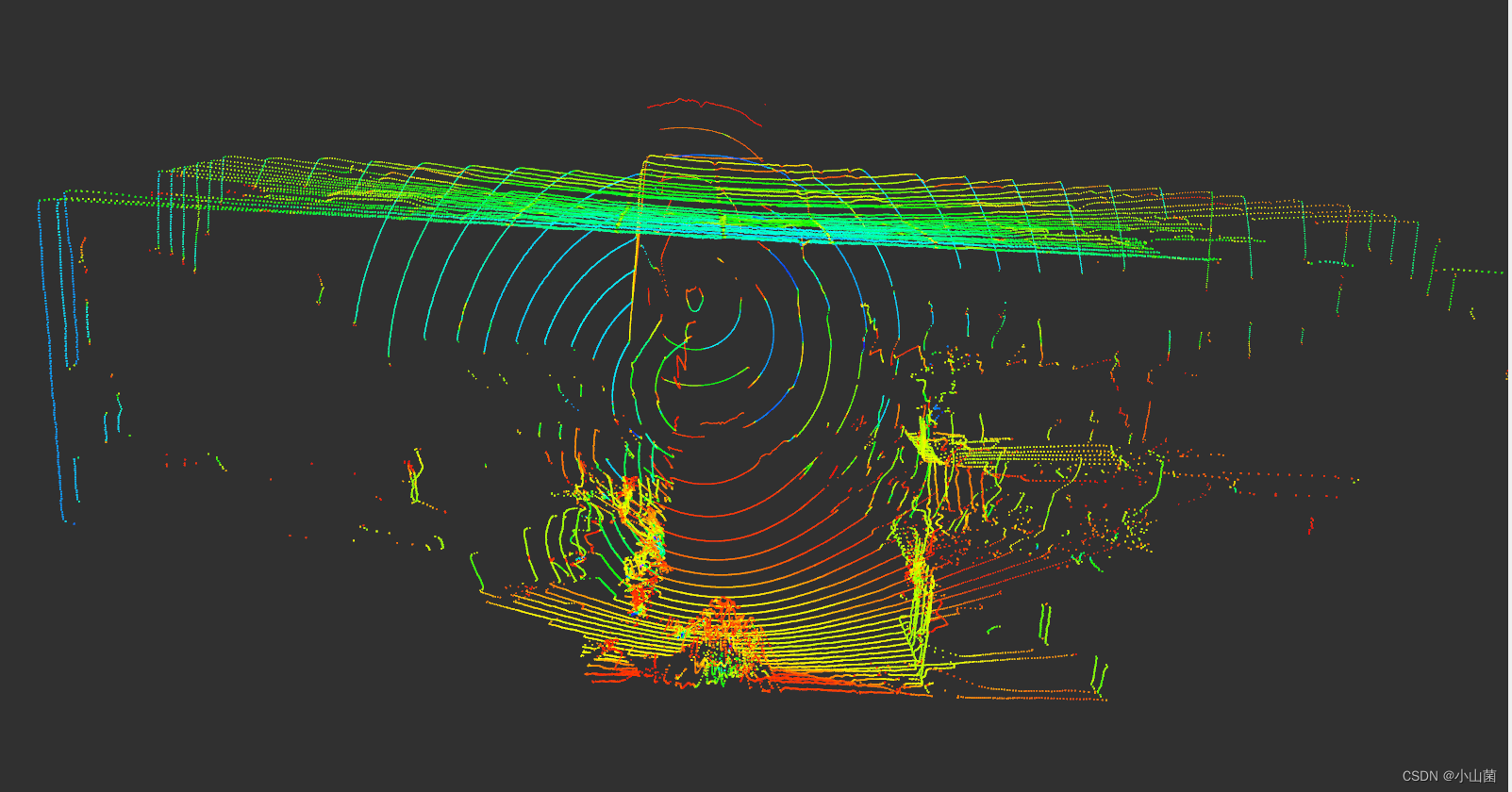
rviz中添加消息名称,可视化
其它
如果ERRCODE_MSOPTIMEOUT报错的问题,应该是ip配置不对,需要修改ip
参考链接:一种ip设置方法

















 255
255

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









