







 本文介绍了激光雷达和毫米波雷达在实际工作中的数据融合需求,着重讨论了两者的测量精度、标定指标,特别是毫米波雷达的标定方法,包括yaw、x、y角的标定以及算法开发思路。开发结果显示,融合后的毫米波雷达点云与激光雷达有十几厘米的误差,满足项目需求。
本文介绍了激光雷达和毫米波雷达在实际工作中的数据融合需求,着重讨论了两者的测量精度、标定指标,特别是毫米波雷达的标定方法,包括yaw、x、y角的标定以及算法开发思路。开发结果显示,融合后的毫米波雷达点云与激光雷达有十几厘米的误差,满足项目需求。
前言
实际工作过程中需要进行激光雷达和毫米波雷达的数据融合,需要进行毫米波雷达和激光雷达联合标定,因此查阅相关资料,手动写了一个简单版本的标定算法,这里对查找到的资料进行简单的梳理。
1 激光雷达和毫米波雷达测量精度
激光雷达参数指标文档:

毫米波雷达参数指标: 官网
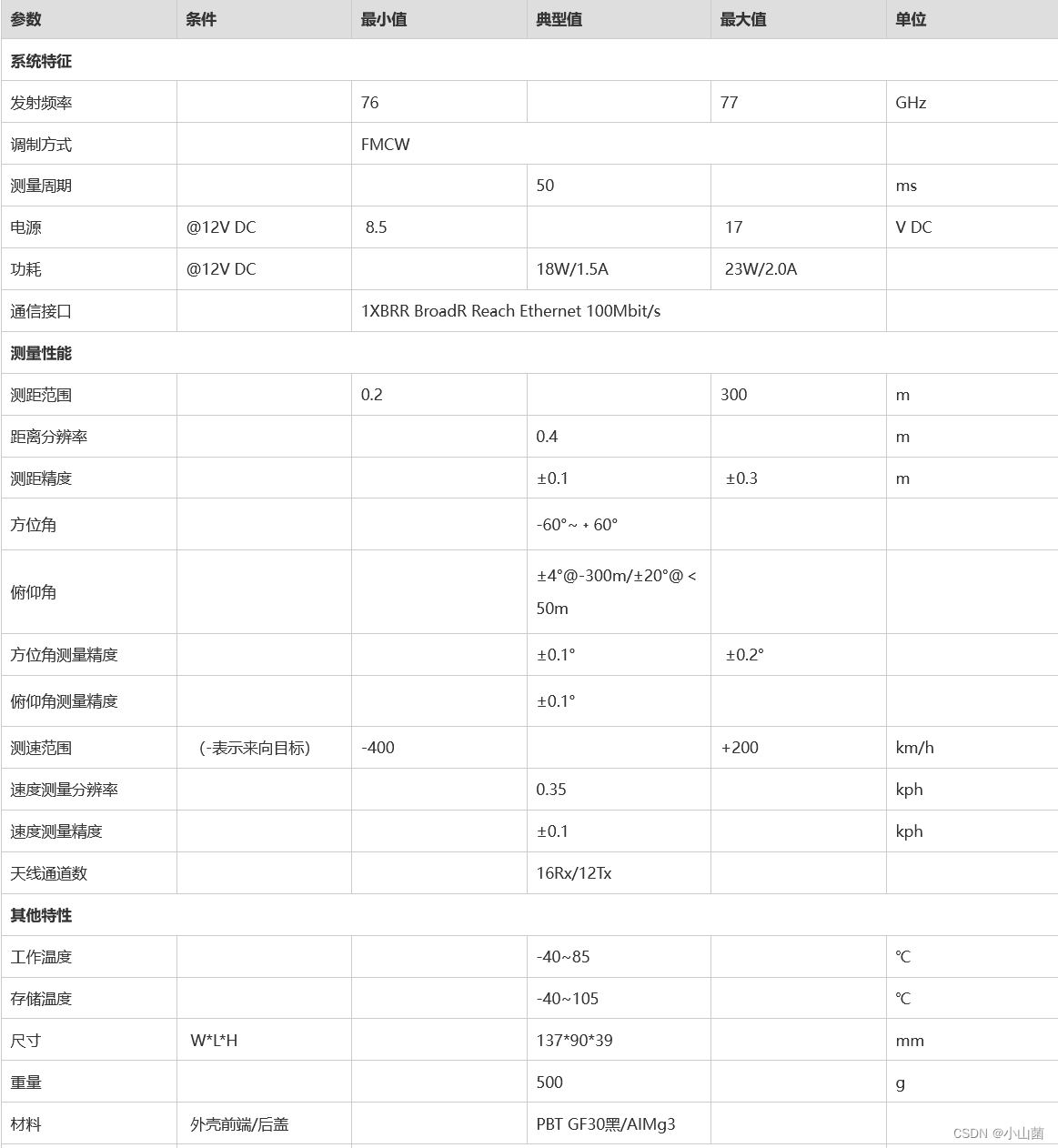
总结:
对于室外场景,考虑到实际角反的位置在20米内,还有毫米波雷达本身的测量误差正负10厘米,激光雷达的误差在正负1厘米,因此,采用激光雷达和角反标定的误差应该在正负10厘米左右。
2 毫米波雷达标定指标
实际测试过程中发现,毫米波雷达在Z轴方向上的误差比较大,一般不采用z值,另外毫米波雷达的安装精度一般比较高,只进行yaw角(绕z轴)进行标定,因此毫米波雷达需要标定
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 182
182

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









