







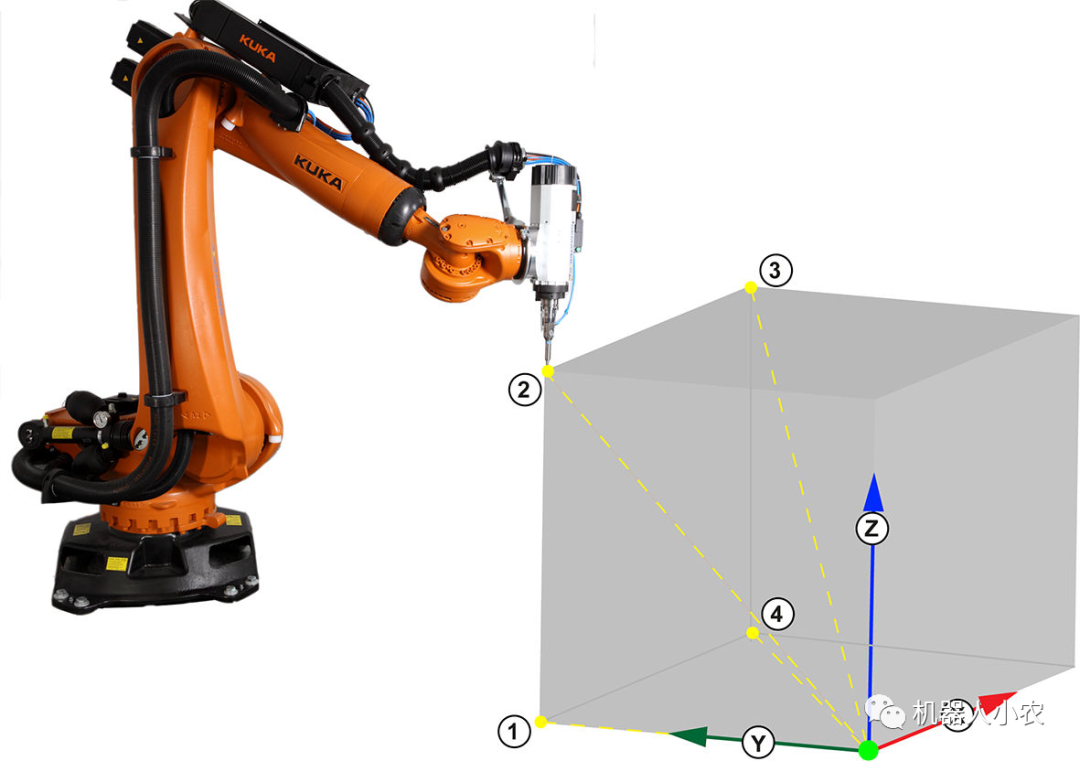
实际工作中如果需要在一个不可达的位置上需要一个基座坐标系,则可以间接地对其进行测量。
为此,必须知道四个空间点参照所需坐标系的坐标。在测量期间用已知的
工具接近这些空间点。机器人现在可以计算/确定基座坐标系。
这四个点通常在加工工件的工装上。
• 法兰上已经安装了测量过的工具。
• 新基座的 4 个点不可达坐标系的坐标必须已知。
例如:从 CAD 中。TCP 可达到这4个点。» 至坐标原点的距离
操作步骤
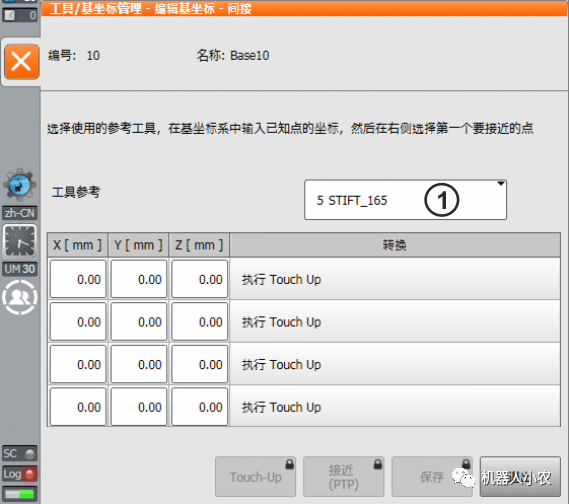
1. 通过工具和基坐标管理添加了一个新的基坐标。
2. 通过测量按键选择间接方法。

3. 选择参考工具
4. 输入和示教参考点
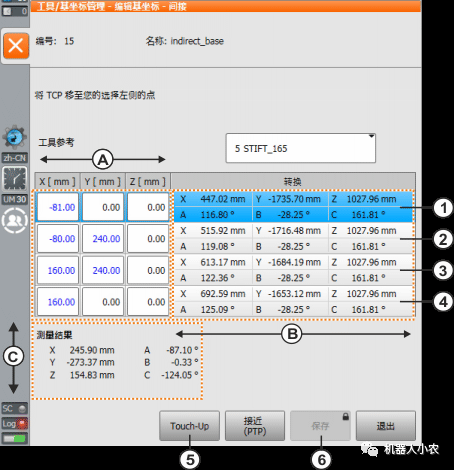
• 在表格 (A) 中为待示教的四个点 (1-4) 输入与待确定的基座坐标原点的相应偏移量。
• 通过参考工具驶向第一个参考点的行 (1)。激活的行被显示成蓝色。
• 用按钮 Touch-Up (5) 记录点。在转换栏中显示确定的值。
• 为剩余的参考值 (3-4) 重复该过程。
长按二维码关注我,机器人小农。。。大家可以用微信关注这个公众号
















 2042
2042











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









