







点云扫描设备在对环境进行扫描时,往往不能在同一坐标系下将环境的点云数据一次性测量。其原因是环境大小超过了扫描设备的测量范围,并且环境里的物体之间相互遮挡,点云扫描设备在一个角度不太可能扫描到物体的完整点云。得到多片点云数据后,我们需要一种技术将多片点云数据旋转平移到统一的坐标系下,使它们能够组成完整的环境点云数据,这种技术叫点云拼接。
点云拼接是任意位置的点云的重叠部分相互配准的过程,点云配准分为刚体和非刚体(只存在空间旋转平移变换的配准问题称为刚体配准,存在缩放、变形、仿射变换的配准问题称为非刚体配准),这里主要介绍刚体点云配准。刚体配准计算旋转矩阵R和平移矩阵T,使源点云旋转平移过去与目标点云重合,保证两片点云对应部分尽可能多的重合。解决的办法是可以将他转化成一个优化问题,即在适当的度量空间中,通过求解最佳旋转和平移矩阵使这样的数据集之间的重叠区域之间的各对应点的平均距离最小。
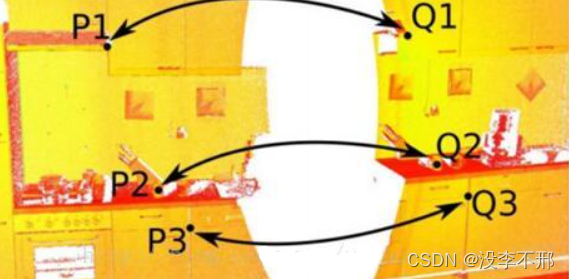
如上图,将两片点云的重叠部分进行配准,两片点云组合成一片更为完整的点云即实现了两片点云的拼接。
点云配准按照初始条件与精确度等,可以分为粗配准与精配准两种配准方法。
粗配准是在源点云与目标点云完全不知道任何初始相对位置的情况下,所进行的配准方法。该方法的主要目的是在初始条件未知的情况下,快速估算一个大致的点云配准矩阵。整个计算过程要求比较高的计算速度,对于计算结果的精确度则不做过高的要求。常见的粗配准算法的思路包括了:基于局部特征描述的方法、基于全局搜索策略以及通过统计学概率等方法。
其中,基于局部特征描述的方法是通过提取源点云与目标点云的邻域几何特征,通过几何特征快速确定二者之间的点对的对应关系,再计算此关系进而获得变换矩阵。而点云的几何特征包括了很多种,比较常见的即为快速点特征直方图(FPFH)。
基于全局搜索策略的代表算法是采样一致性算法(SAC_IA),该算法在源点云与目标点云之间随机选取几何特征一致的点组成点对。通过计算对应点对的变换关系,得到最优解。
正态分布算法(NDT)利用统计学概率的方法,根据点云正态分布情况,确定了对应点对从而计算源点云与目标点云之间的变换关系。
精配准是利用已知的初始变换矩阵,通过迭代最近点算法(ICP算法)等计算得到较为精确的解。ICP算法通过计算源点云与目标点云对应点距离,构造旋转平移矩阵RT,通过RT对源点云变换,计算变换之后的均方差。若均方差满足阈值条件,则算法结束。否则则继续重复迭代直至误差满足阈值条件或者迭代次数终止。ICP算法具有以下特点:
优点:配准结果精确度较高,是一种精确配准算法;
缺点:对于两片点云的初始位置要求较为严格,否则容易陷入局部收敛且会
影响配准速度,因此需要通过粗配准来为ICP提供较好的点云初始位置。
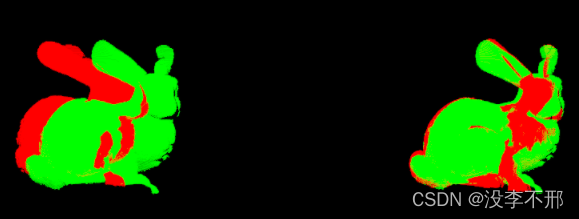
配准效果如上图,左边为两片兔子的外部轮廓的点云的粗配准,右边为精配准。
参考及推荐阅读链接:
ICP 多视角点云对齐方法介绍_yuluoxuanyuan1992的博客-CSDN博客_点云对齐
ICP原理:https://zhuanlan.zhihu.com/p/104735380

















 928
928

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









