







准备工作: 创建工作空间,在src下创建smartcar功能包(见相关ROS基础入门)
1.创建ros package命名为smartcar
catkin_create_pkg smartcar std_msgs rospy roscpp urdf 2.建立文件夹launch和urdf分别用来存放.launch文件和.urdf文件
3 在smartcar文件夹下建立urdf文件夹,创建智能车的描述文件smartcar.urdf,描述代码如下:
<?xml version="1.0"?>
<robot name="smartcar">
<link name="base_link">
<visual>
<geometry>
<box size="0.25 .16 .05"/>
</geometry>
<origin rpy="0 0 1.57075" xyz="0 0 0"/>
<material name="blue">
<color rgba="0 0 .8 1"/>
</material>
</visual>
</link>
<link name="right_front_wheel">
<visual>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<joint name="right_front_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="right_front_wheel"/>
<origin rpy="0 1.57075 0" xyz="0.08 0.1 -0.03"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
<link name="right_back_wheel">
<visual>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<joint name="right_back_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="right_back_wheel"/>
<origin rpy="0 1.57075 0" xyz="0.08 -0.1 -0.03"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
<link name="left_front_wheel">
<visual>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<joint name="left_front_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="left_front_wheel"/>
<origin rpy="0 1.57075 0" xyz="-0.08 0.1 -0.03"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
<link name="left_back_wheel">
<visual>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<joint name="left_back_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="left_back_wheel"/>
<origin rpy="0 1.57075 0" xyz="-0.08 -0.1 -0.03"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
<link name="head">
<visual>
<geometry>
<box size=".02 .03 .03"/>
</geometry>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
</link>
<joint name="tobox" type="fixed">
<parent link="base_link"/>
<child link="head"/>
<origin xyz="0 0.08 0.025"/>
</joint>
</robot>
4.图形化显示URDF模型
我们现在已经完成了一个简单的URDF模型创建,ROS提供了相应的工具可以让URDF图像化显示出来。
urdf_to_graphiz /home/daniel/catkin_ws/src/smartcar/urdf/smartcar.urdf- 创建display.launch文件
该文件可以帮助启动RViz来观察机器人。其中有三个node,一个是rviz,另外两个joint_state_publisher robot_state_publisher是必须的node。
第一个输入参数 model 就是要启动的urdf文件路径。
第二个输入参数 gui 指定是否启用关节转动控制面板窗口。
<launch>
<arg name="model" />
<arg name="gui" default="False" />
<param name="robot_description" textfile="($find urdf_tutorial)/home/daniel/catkin_ws/src/smartcar/urdf/smartcar.urdf)" />
<param name="use_gui" value="$(arg gui)"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find urdf_tutorial)/urdf.rviz" required="true" />
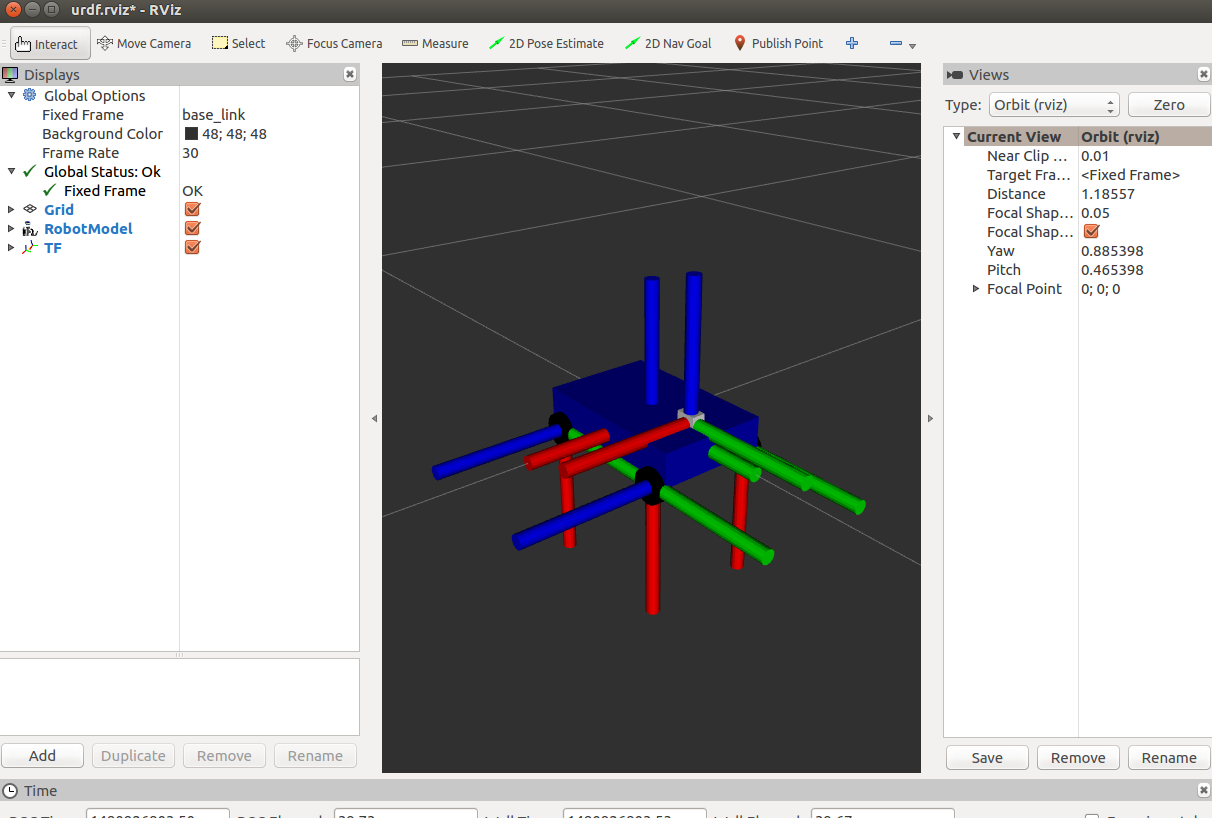
</launch> 7.切换到launch文件夹下,使用下面命令启动rviz来查看我们刚刚完成的机器人模型:
roslaunch urdf_tutorial display.launch model:=urdf/smartcar.urdf
这里完成了三件事情:
加载特定的模型到参数服务器
运行节点来发布关节状态和转换
运行rviz及其配置文件
这个launch文件假设smartcar.urdf在你所运行命令的文件夹的urdf子文件夹中(所以切记这里的roslaunch语句应该在smartcar文件夹下运行,不然会出现错误:No such file or directory: u'urdf/smartcar.urdf'),否则,你可以用:model:=’$(find pkg-name)/urdf/smartcar.urdf’。这里pkg-name是这个文件所在包的名称。这里所有的例程都在urdf_tutorial包中。
我们可以看到下面的画面:
如果运行:
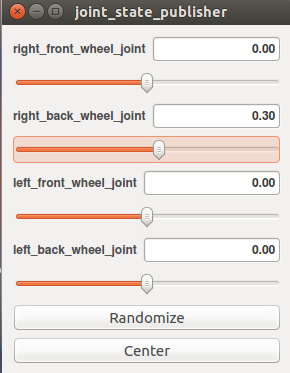
roslaunch urdf_tutorial display.launch model:=urdf/smartcar.urdf gui:=true
你会顺便看到弹出一个控制面板…
出现错误:
1)
No transform from [tyer_back_left] to [base_link]解决:这是urdf 文件的格式问题……
2)
No tf data. Actual error: Fixed Frame [base_link] does not exist解决:因为我是前一天已经做好了的,第二天一直报这个错误,原来是因为我没有在同一个终端窗口下完成这些步骤…也是醉了
















 1116
1116











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











