







1. 背景
这段时间以来,先是按照by example 的作者的例子,将它看懂,改动,以运用到youbot上来。其中修改完毕并测试成功的有:moveit_fk_demo.py(关节空间), moveit_ik_demo.py(笛卡尔空间),arm_tracker.py(追踪空中的球)
视频地址
http://v.youku.com/v_show/id_XMTQ0NDUwOTQ4NA==.html?from=y1.7-1.2
以及moveit_cartesian_demo.py(加入途经点)。但是后面的那个moveit_constraints_demo.py(path_constraints)修改后,提示
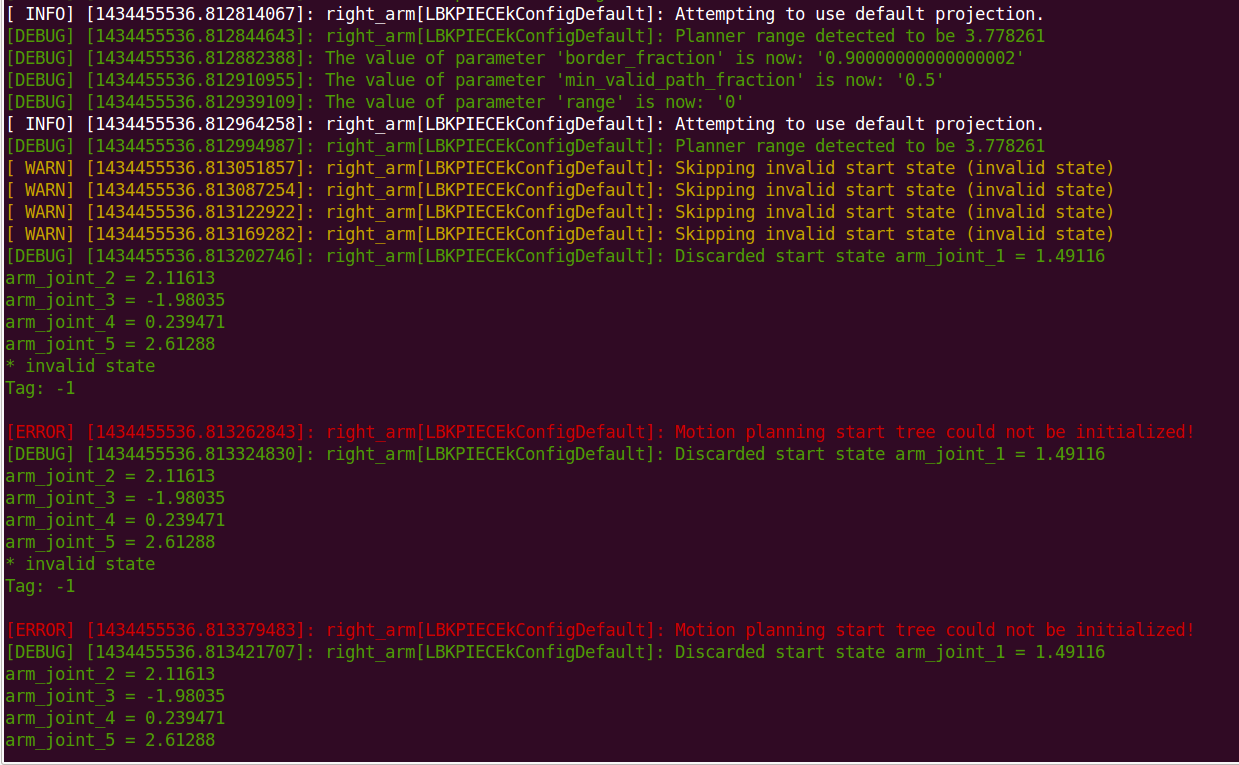
也就是invalid start state, 造成Motion Planning 失败。这个问题困扰了半个月,期间查ros answer 和 moveit mailing list都没有找到较好的解决方案。然后,一边郁闷,一边尝试利用moveit 的c++接口实现之前的动作,后来发现有些功能python中没有涉及到,于是有了这篇博客。
2. 你需要知道的
我们秉承着“最好的学习资料来自官网“,在http://moveit.ros.org/documentation/tutorials/ 中有关于tutorial的部分。然后就转到了http://docs.ros.org/hydro/api/pr2_moveit_tutorials/html/index.html 这里。下面就具体说明:
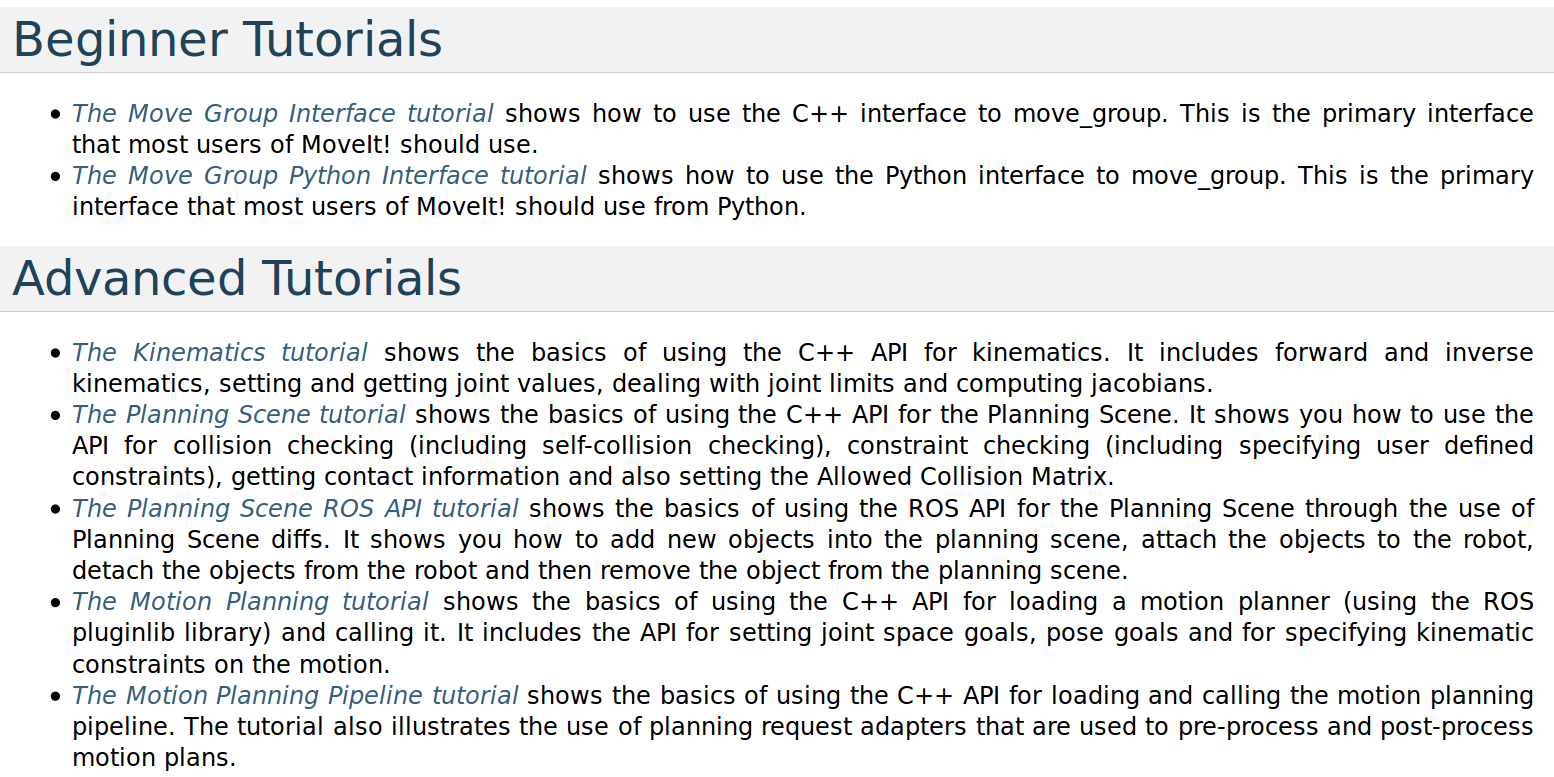
上面提到的tutorial程序的完整版在https://github.com/ros-planning/moveit_pr2/tree/hydro-devel/pr2_moveit_tutorials/planning/src
它这里起名比较乱,我最开始也绕晕了,在这里整理出来,也方便大家查阅。
The Move Group Interface tutorial ====对应于github的======>> move_group_interface_tutorial.cpp 转到Github(C++中可以调用)
The Move Group Python Interface tutorial ====对应于github的======>> moveit_pr2/pr2_moveit_tutorials/planning/scripts/move_group_python_interface_tutorial.py转到Github
(Python中可以调用)
上面这两个是官方建议我们用的。也是moveit中用的最多的一些功能。
下面的这几个是进阶用法,主要是C++中调用,Python版本的没有,也就是说进阶功能你必须用C++来写,这也就是我之所以要转到C++这里来的原因,另外用C++较多,也熟悉一点,不必再重头来学Python。
The Kinematics tutorial ==对应于github的==>> moveit_pr2/pr2_moveit_tutorials/kinematics/src/kinematic_model_tutorial.cpp 转到Github(注意前面tutorial那里还有关于state_display的教程)
The Planning Scene tutorial ====对应于github的===>> planning_scene_tutorial.cpp(selfcollision and constraint check )
The Planning Scene ROS API tutorial ==对应于github的3个地方==>>move_group_interface_tutorial.cpp、move_group_tutorial.cpp和planning_scene_ros_api_tutorials.cpp(主要功能就是添加/移除物品到规划场景中)
The Motion Planning tutorial ===对应于github的==>> planning_scene_ros_api_tutorial.cpp 转到Github (动态加载motion planner)
The Motion Planning Pipeline tutorial ==对应于github的===>> planning_scene_ros_api_tutorial.cpp转到Github (规划的预处理和后处理)
3. 运行与分析
1. 关于Move Group interface
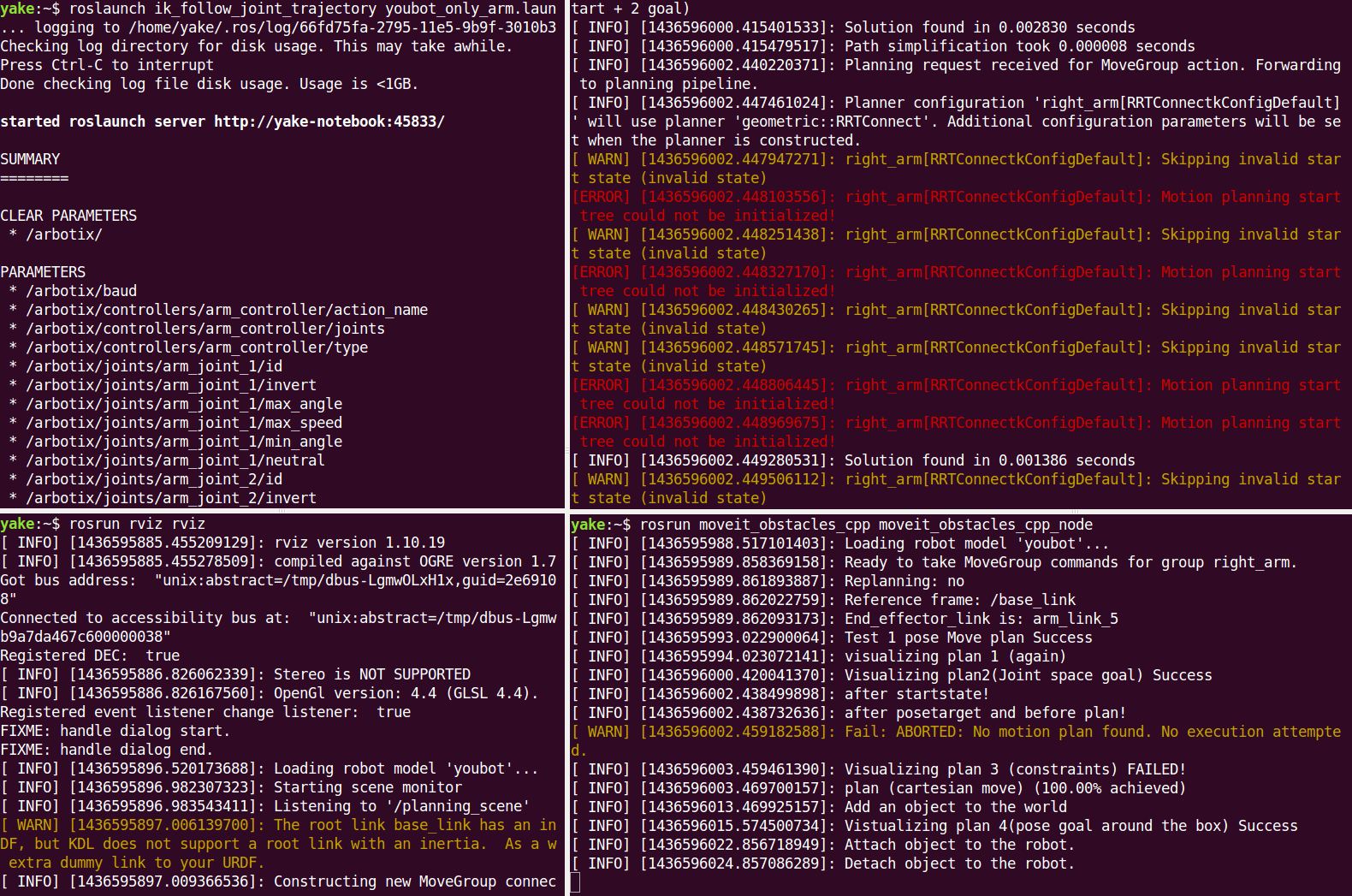
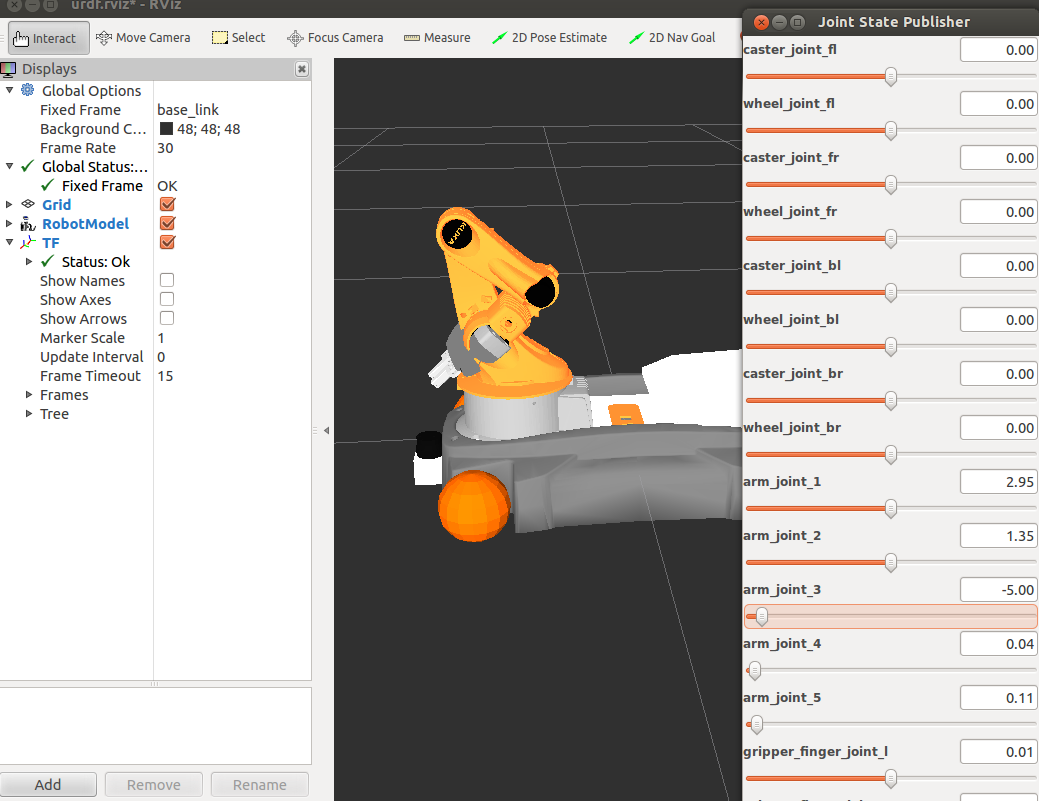
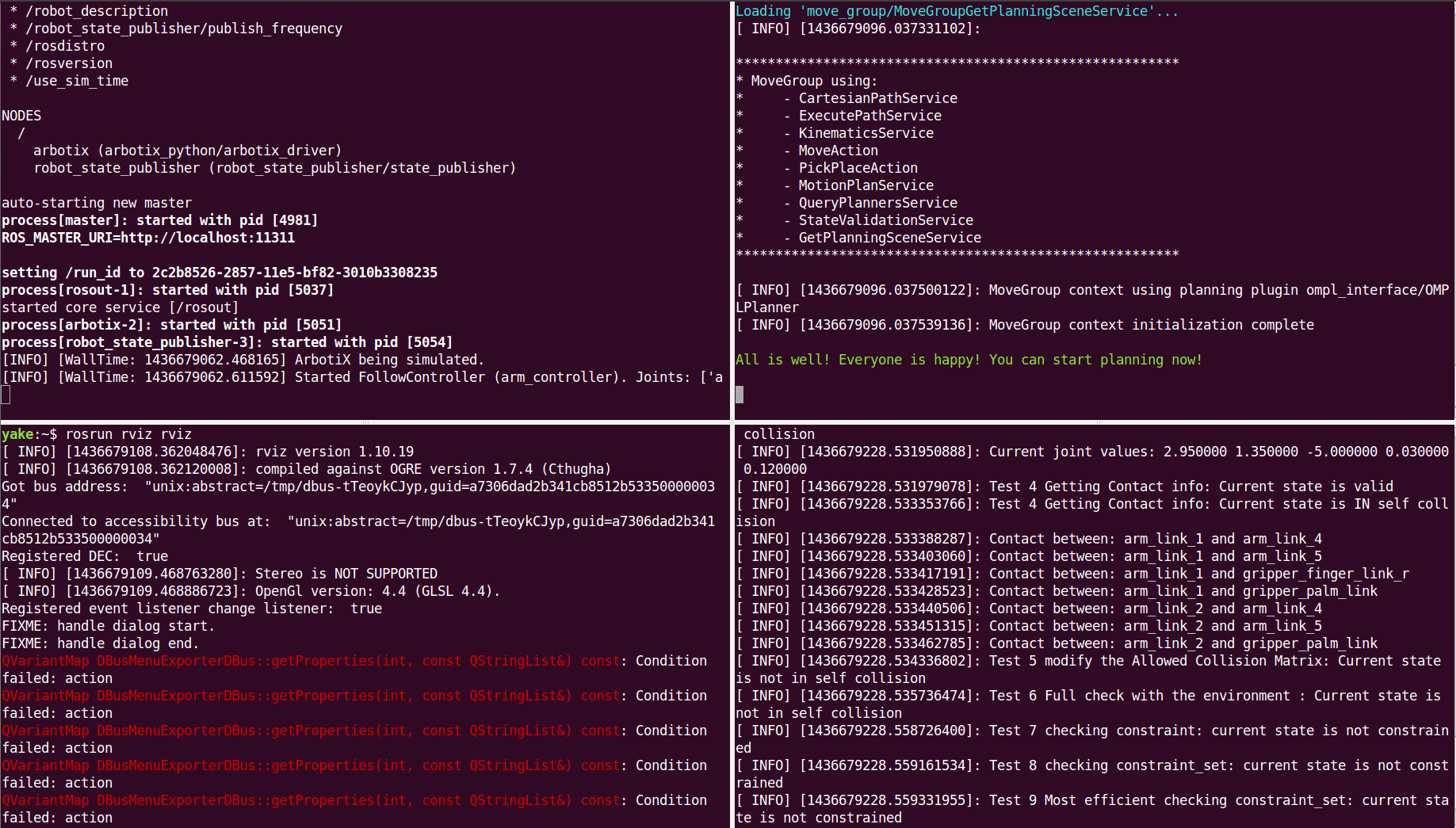
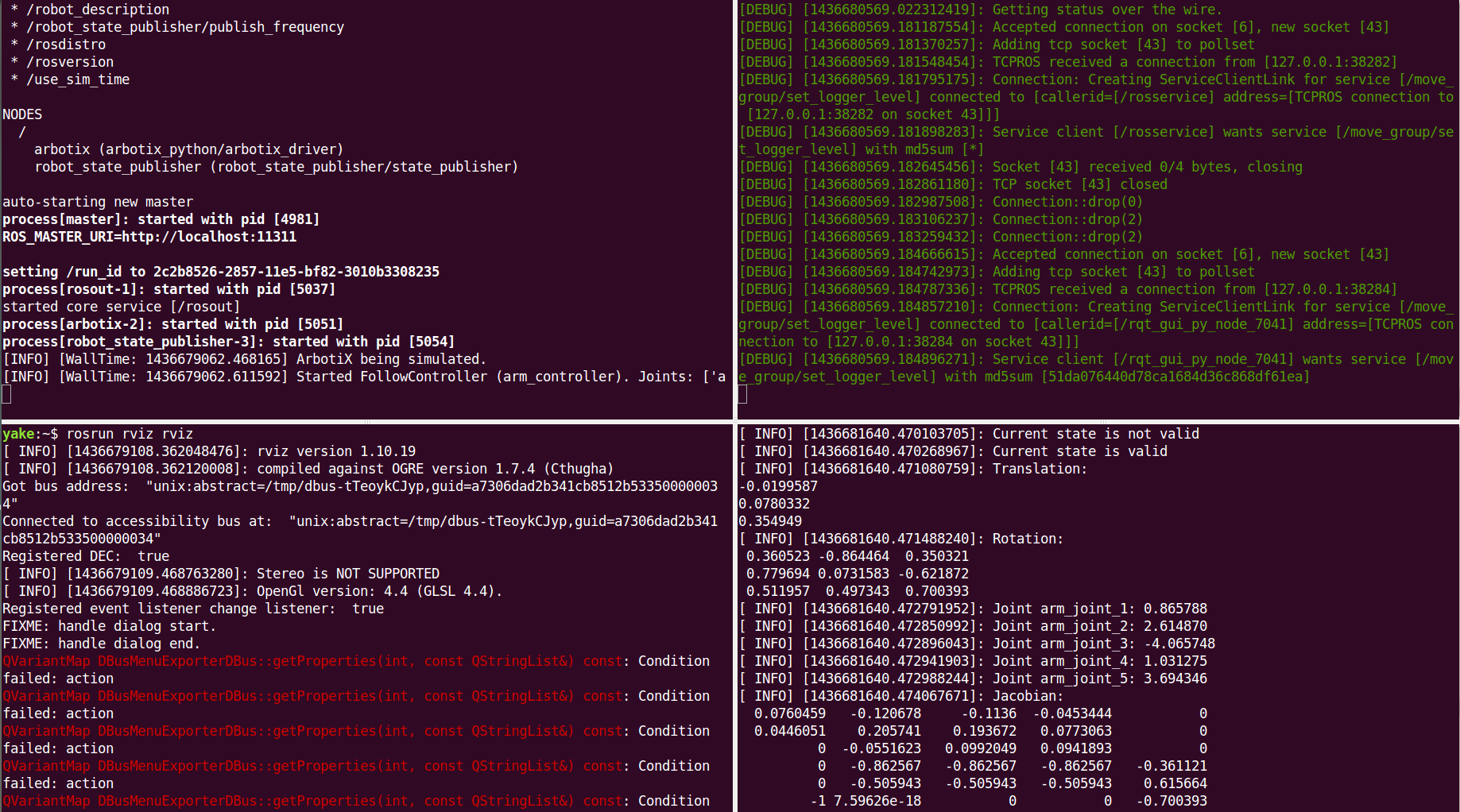
左上角是启动FollowJointserver,右上角是启动Move_group.launch。左下角rviz图形界面,右下角是测试程序(后面的结果页面也都是如此,我就不再具体指明了)
由于自己的那个constraint原因,造成右下角窗口的Plan fail。后来求助ROS QQ群的群友,有说可能是碰撞问题,因此我就找寻Moveit中关于碰撞检测的部分。
2. 关于collision check和constrait check
这个按照官网例程是属于The Planning Scene tutorial部分。
在这里我给定了一个必然碰撞的位置,Moveit能够较好的指出contact的关节。即下图中的test4.
测试结果如下图所示:
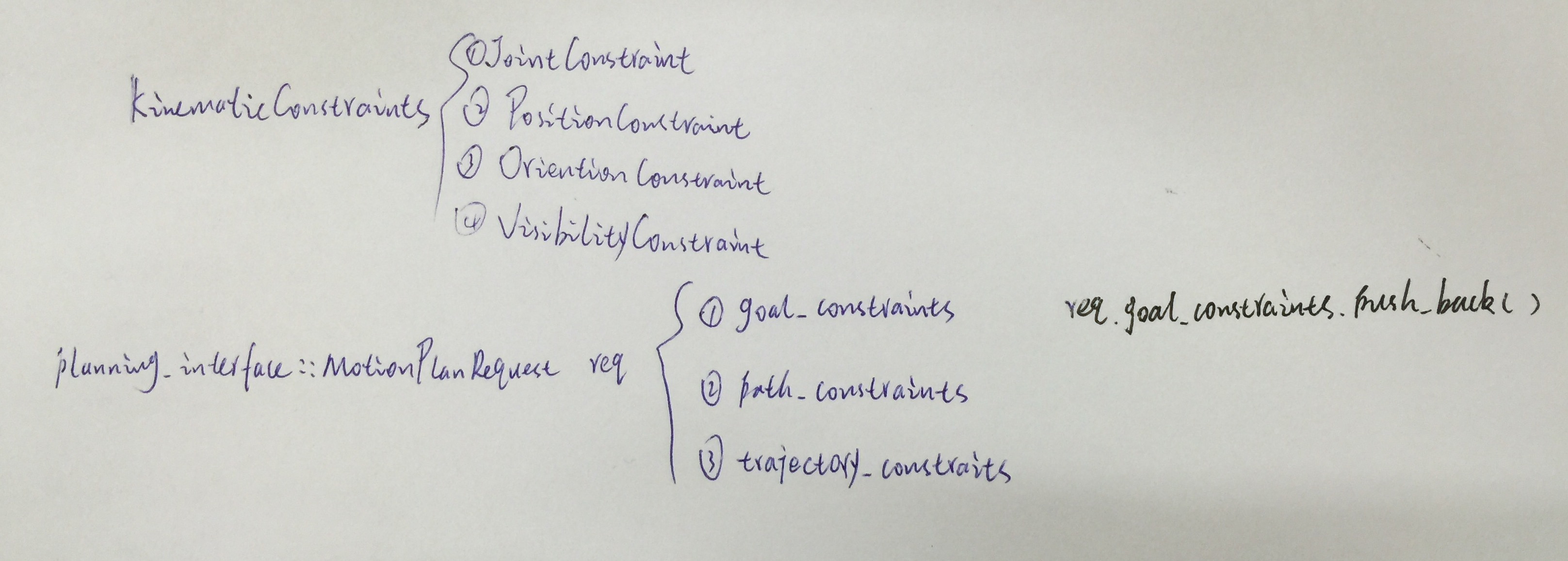
这里得说明一个地方,就是这里的Move_group那个窗口,十分明显的一点,它没有数据滚动,是不是就是说它没有起作用呢?也就是没有数据交给它处理,我直接关闭它,然后再启动测试程序,结果测试就定在那个地方不动了。说明猜测不成立。另外关于constraints,也分为了好几种,如下图:在req的3个constraints中,它的每一个都可以分别添加前面那四个。比如goal_constraints可以加入PositonConstraint和OrientionConstraint,这个depends on you

这里再说一个小技巧,终端运行rosrun rqt_logger_level rqt_logger_level

将模式选为Debug,输出就会包含更多有用的信息。我原本以为这样就可以解决问题了,但是还是不行。碰撞那里一切都ok,test4是我强制设置的一个碰撞位置,有效果,但是之前的都没有碰撞。
4. 关于Kinematics
这部分比较有用的就是根据robot_model生成的一个robot_state::RobotStatePtr 类型的Kinematic_state, 后面的操作都与它相关,包括enforce joint limit, IK,GetJacobian等。
5. Motion Planning
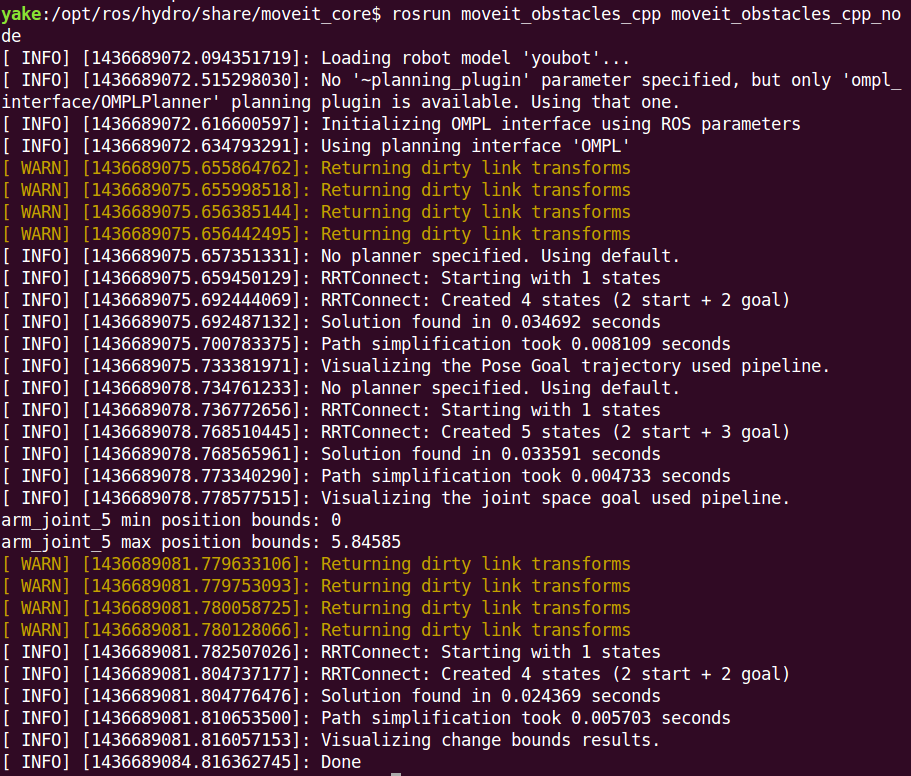
官网解释是动态加载motion planner,但是我们的Planer只有个OMPL,所以感觉意义不大。但是做下来,改动完,才发现有些细节的地方,比如,工作空间要提前设置大小,不然会报错。官网这里没有提及,它放在了程序后面。测试后发现要改到前面去。另外执行的时候,它有个命令行参数,rosrun moveit_obstacles_cpp moveit_obstacles_cpp_node _planner_plugin_name:=ompl_interface/OMPLPlanner这是我这边的执行语句,大家根据自己的情况改成对应的package名字和node名字。
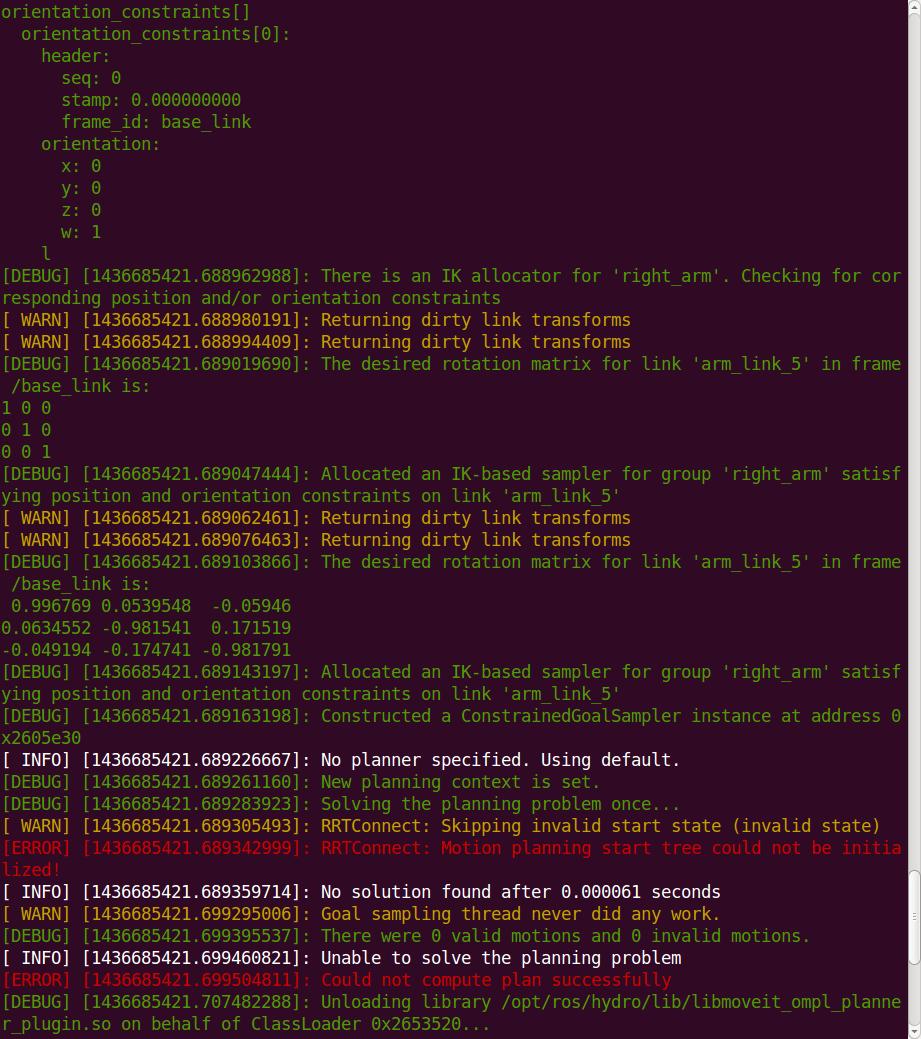
这个错误还是由于path constraint造成。
6. Planning PipeLine
对motion planning进行前处理和后处理。
写在最后
以上基于官方修改的代码我放在了https://github.com/StanleyYake/Kuka_youbot/tree/master/change_tutorial
我是按照a、b、c、d、e来命名的,a2表示在适配youBot以后,我又做了自己的一些修改等等。
- Moveit很多东西帮我们封装起来了,但是实际中用的时候老是觉得心里发虚,不踏实。写出来希望大家可以参考看看,但是最好的东西还应该是官方的那些tutorials
- 由于添加path constraints时,我并没有成功,但是这也应该是最精华的一部分,但由于花费了太多时间,我想先暂时放一放,不过这个问题我会持续关注的。
















 6710
6710

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











