






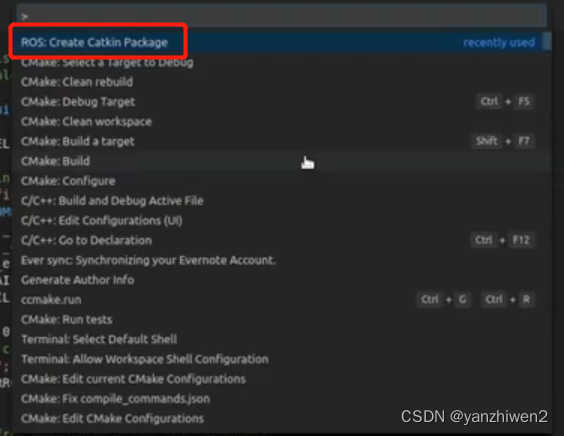
1. shift+ctrl+p ROS Create Catkin Package
2. 输入要创建的package名字

3. 输入依赖项std_msgs rospy roscpp

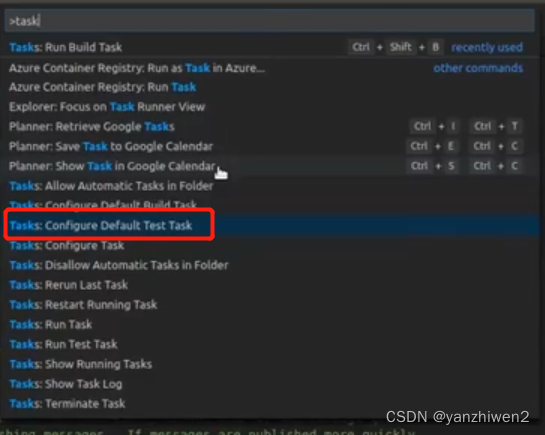
4. 创建Tasks: Configure Default Test Task
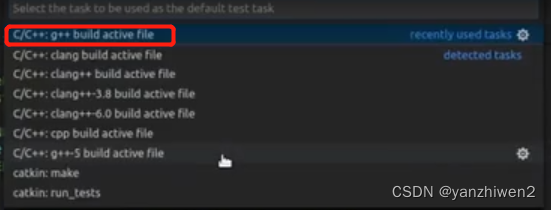
5. 选择g++ build active file
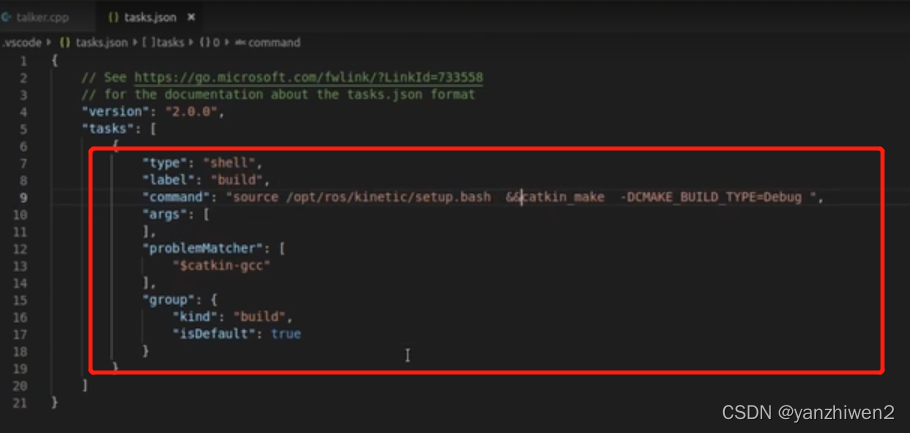
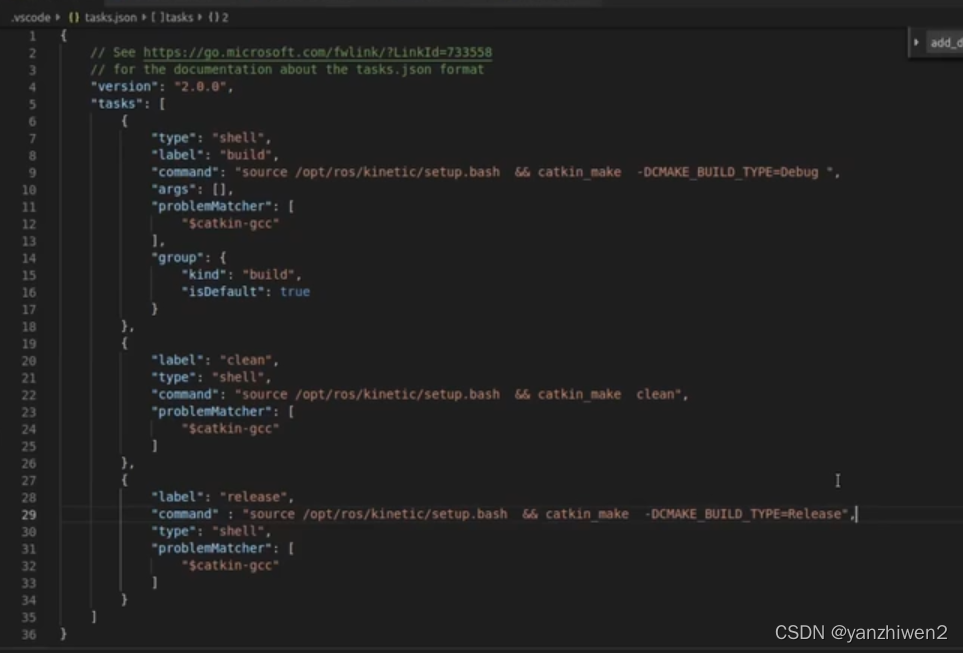
6. 修改自动生成的tasks.json如下
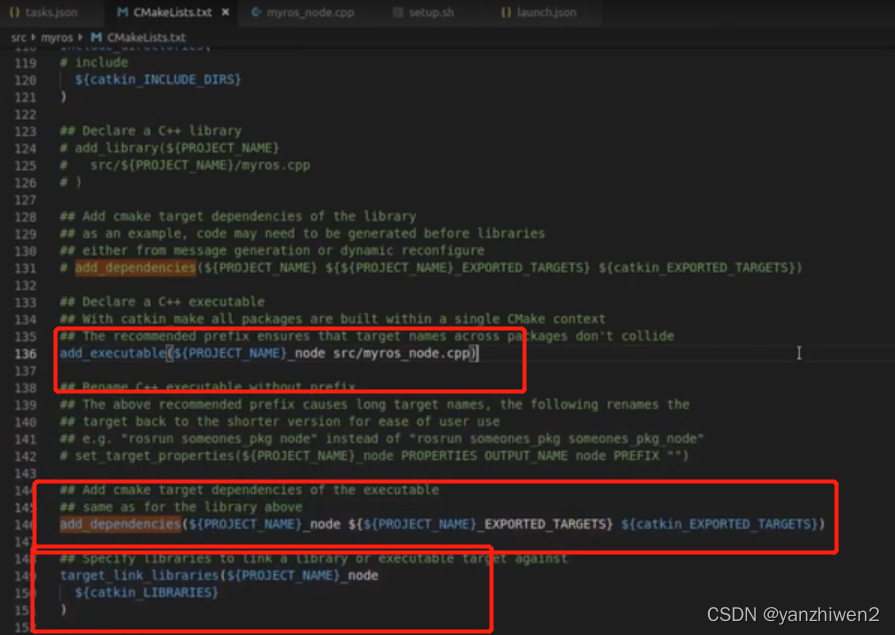
7. CMakeList添加三行
8. 创建Tasks: Run Task
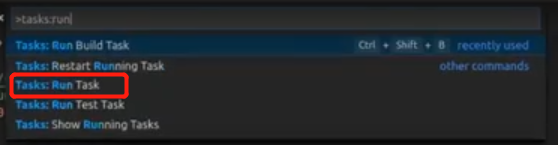
9. 选择build就会自动编译

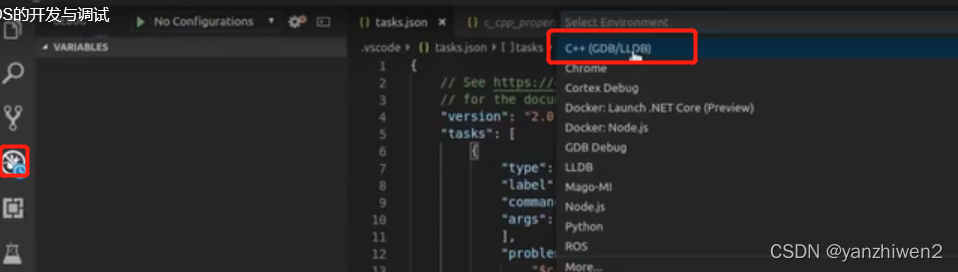
10. Debug选择C++(GDB/LIDB)自动生成launch.json
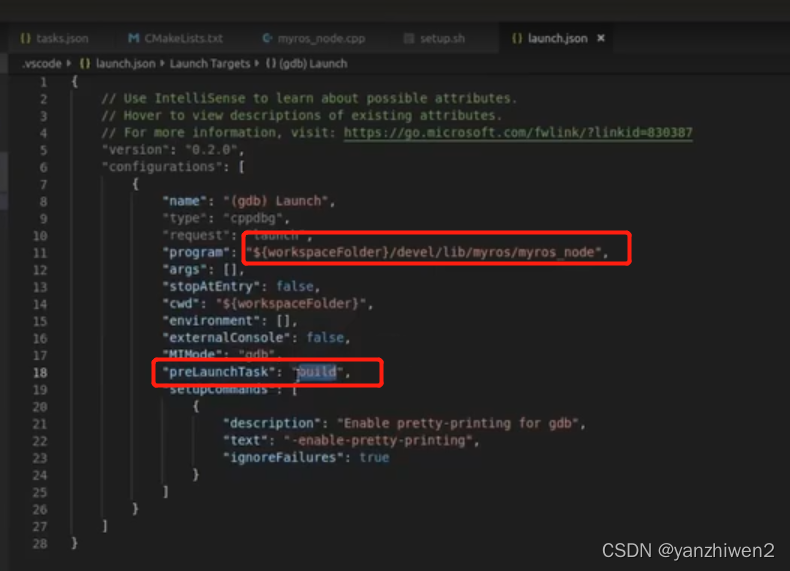
11. 修改json如下
12. 重复8-9
13. 打断点debug即可
14. 还可完善tasks.json














 1520
1520











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









