






 本文记录了一名大二测控专业学生在研究激光雷达和SLAM算法过程中遇到的环境配置和软件问题,包括设置LIDAR_TYPE、boost库错误以及终端权限设置。作者分享了解决步骤,供同样遇到问题的读者参考。
本文记录了一名大二测控专业学生在研究激光雷达和SLAM算法过程中遇到的环境配置和软件问题,包括设置LIDAR_TYPE、boost库错误以及终端权限设置。作者分享了解决步骤,供同样遇到问题的读者参考。
本人是大二测控专业生,由于实验室的项目需求开始研究激光雷达和slam算法,写这篇帖子的原因也是出于想将自己在搞技术过程中遇到的问题总结出来,如果有遇到相同问题的朋友可以看看这篇帖子当作参考,也算是没有白研究。鉴于我还只是处于刚刚入门的阶段,后续遇到的问题会不定时总结出来,本系列也将不定期更新哈。
首先来说一下我所用到的硬件和环境方面,激光雷达是在亚博智能科技官网上购买的思岚激光雷达A1M8型号,在制作自动建图和导航的ros机器人上属于比较实用,以下是购买后商家所提供的资料包网页,有需要的小伙伴可以购买后自行查看。
环境方面使用的是VM虚拟机搭建的Ubuntu20.04版本,并不是商家资料包中配套的18.04版本
(当然使用20.04是出于项目要求,店家资料包中的虚拟机是环境全部配置好可以直接运行建图launch文件的,20.04版本则需要自行搭好环境)
使用的是ros-noetic版本
1.在20.04搭建环境时遇到的设置激光雷达型号的问题:

如图在店家配套的虚拟机中是可以在 .bashrc 文件中直接修改LIDAR——TYPE的,但是20.04环境中需要自行将缺失的代码补齐进行设置。
终端中输入sudo gedit ~/.bashrc代码进入.bashrc页面进行编辑

export LIDAR_TYPE=a1 #a1,a2,a3,s2,c1
echo -e "LIDAR_TYPE: \033[32m$LIDAR_TYPE\033[0m"
source /opt/ros/noetic/setup.bash
之后就可以继续按照资料包中的教程配置环境。
2.在对功能包进行catkin_make进行时无法成功的问题

报错如下
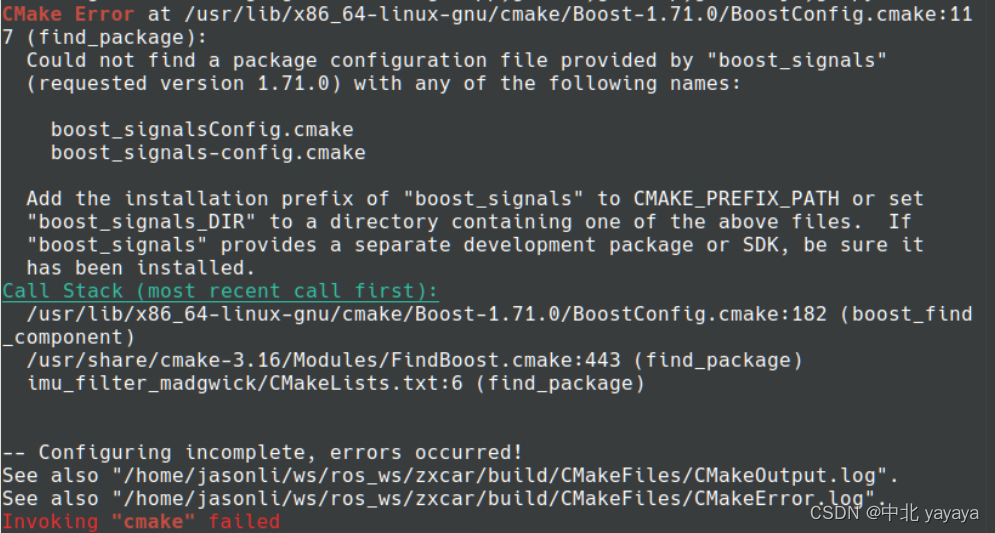
报错原因是boost库文件出现问题,详细的解决方法可以查看这篇帖子
在解决问题途中,又遇到了终端无法找到命令的问题

在运行该命令时应该先为自己的Ubuntu用户提供root权限
添加的方法可以看这里
ubuntu为用户设置root权限 - 知乎 (zhihu.com)
至此boost库问题解决,catkin_make编译成功,可以运行功能包里的launch文件
下次不定时更新~















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









