






前言
寒假在家闲着也是闲着,索性就向是实验室借了一个思岚 A1激光雷达,来进一步完成自己的实验室实习项目。经过一个月在Linux上和ROS上的摸爬滚打,我已经对机器人开发和SLAM有了初步了解,现在就写个上手教程吧(以防自己以后忘了)。
Basic Support
硬件
-
一台电脑
-
思岚 A1激光雷达
软件
-
安装Virtual Box虚拟机
-
在虚拟机安装Ubuntu 16操作系统
-
在Ubuntu 16搭建ROS kinetic
简要步骤
1.现在windows看一下是否正常
2.在Linux上正式上手Windows
Windows
-
通过USB将雷达与电脑连接
-
下载USB驱动 https://www.silabs.com/interface/usb-bridges(选第二个)

-
选择frame-grabber.exe
-
打开应用
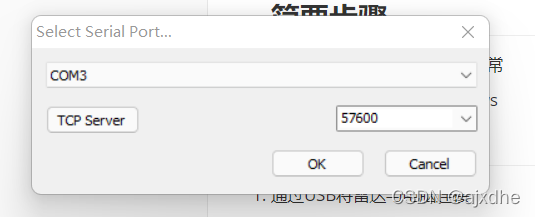
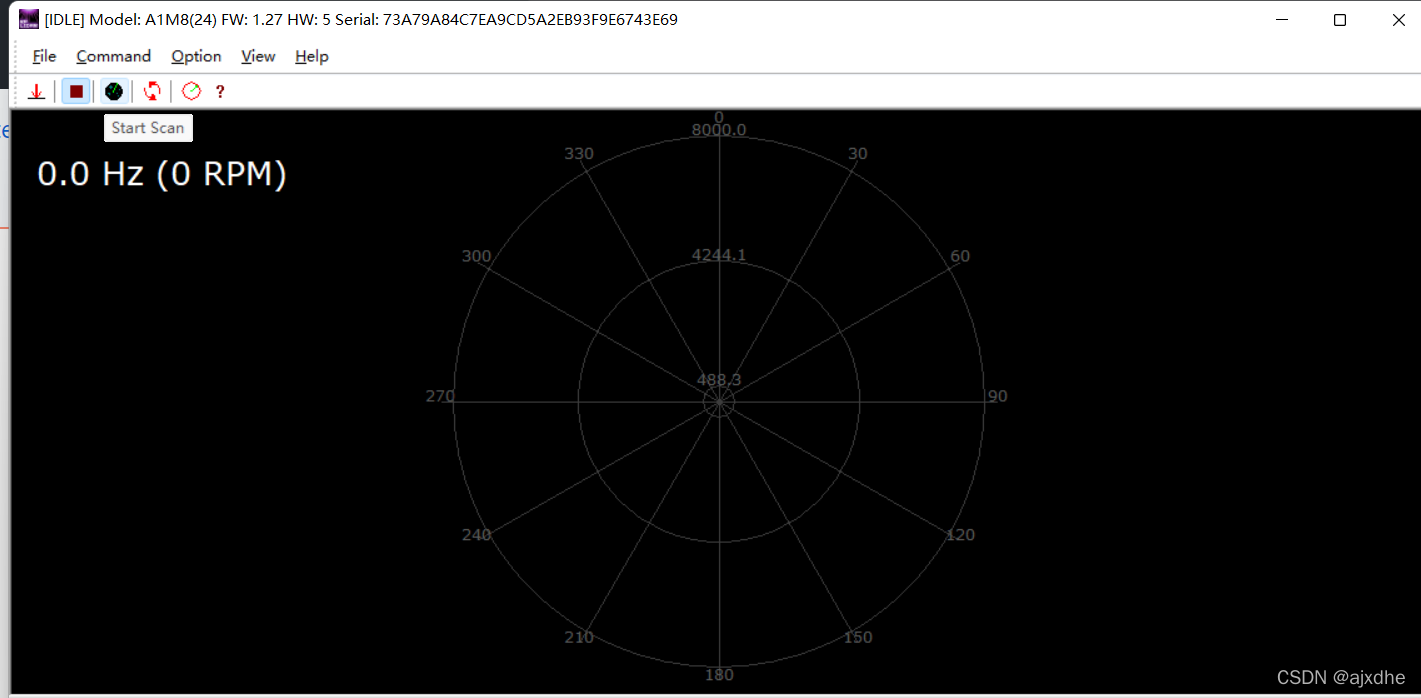
6.开始扫描
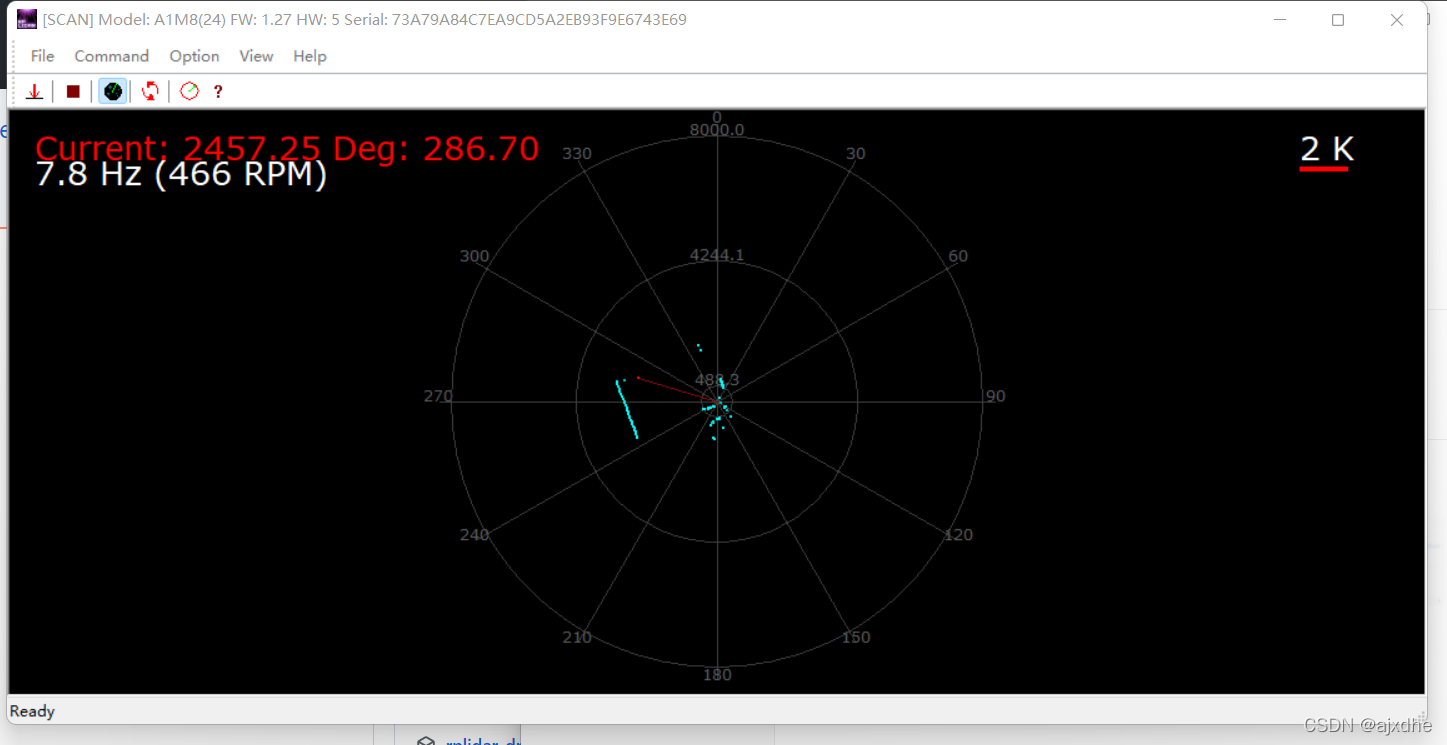
接下来可以在Linux开整了
Linux
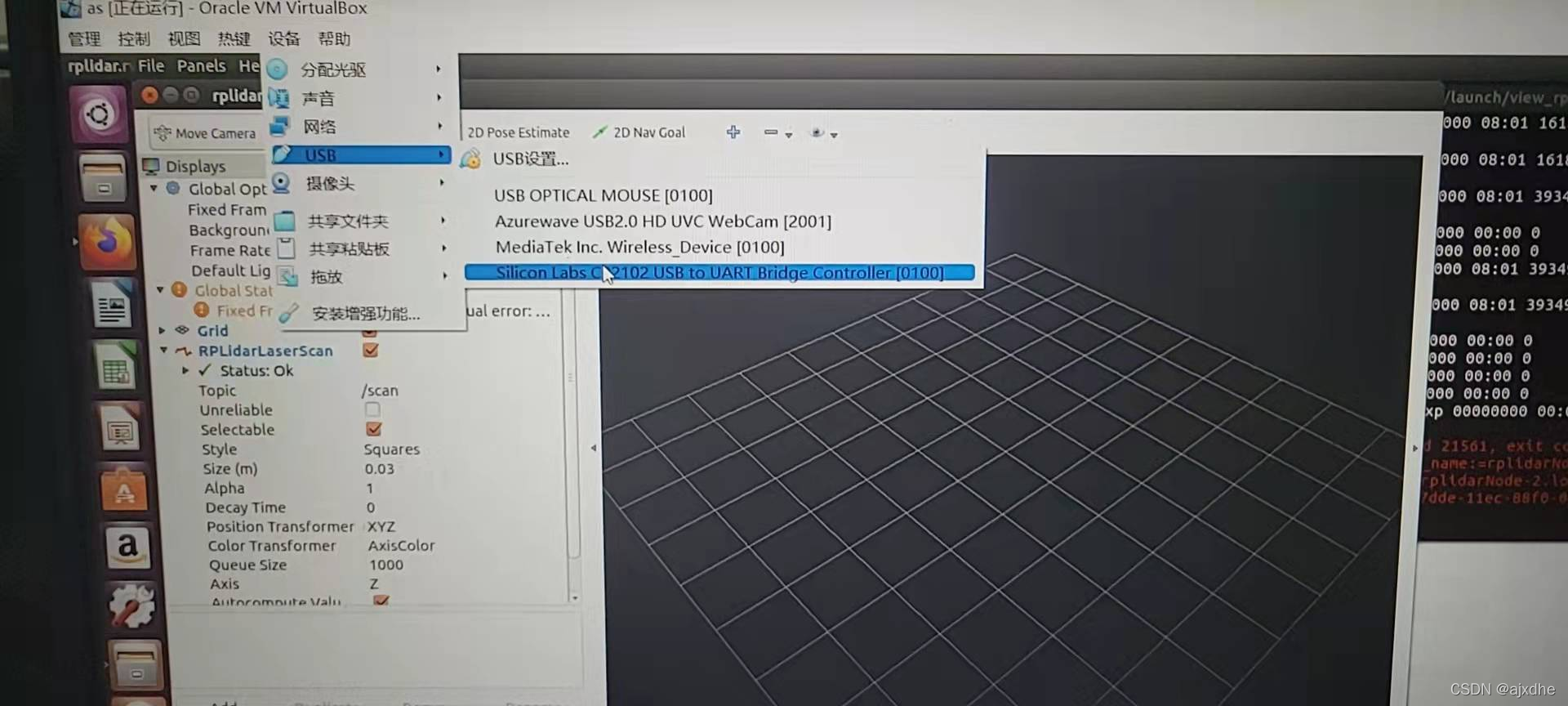
warning
在虚拟机记得勾上这个
-
建立工作空间
$ mkdir -p ~/turtlebot_ws/src $ cd ~/turtlebot_ws/src ## 激光雷达rplidar一代驱动 $ git clone https://github.com/ncnynl/rplidar_ros.git
2.添加环境变量,在~/.bashrc最后添加一行:
tip 需要在home中按ctrl+h才能查看bashrc文件
source /home/ubu/turtlebot_ws/devel/setup.bash
3.刷新配置
source ~/.bashrc
4.检查端口权限
ls -l /dev |grep ttyUSB
5.设置端口权限666
sudo chmod 666 /dev/ttyUSB0
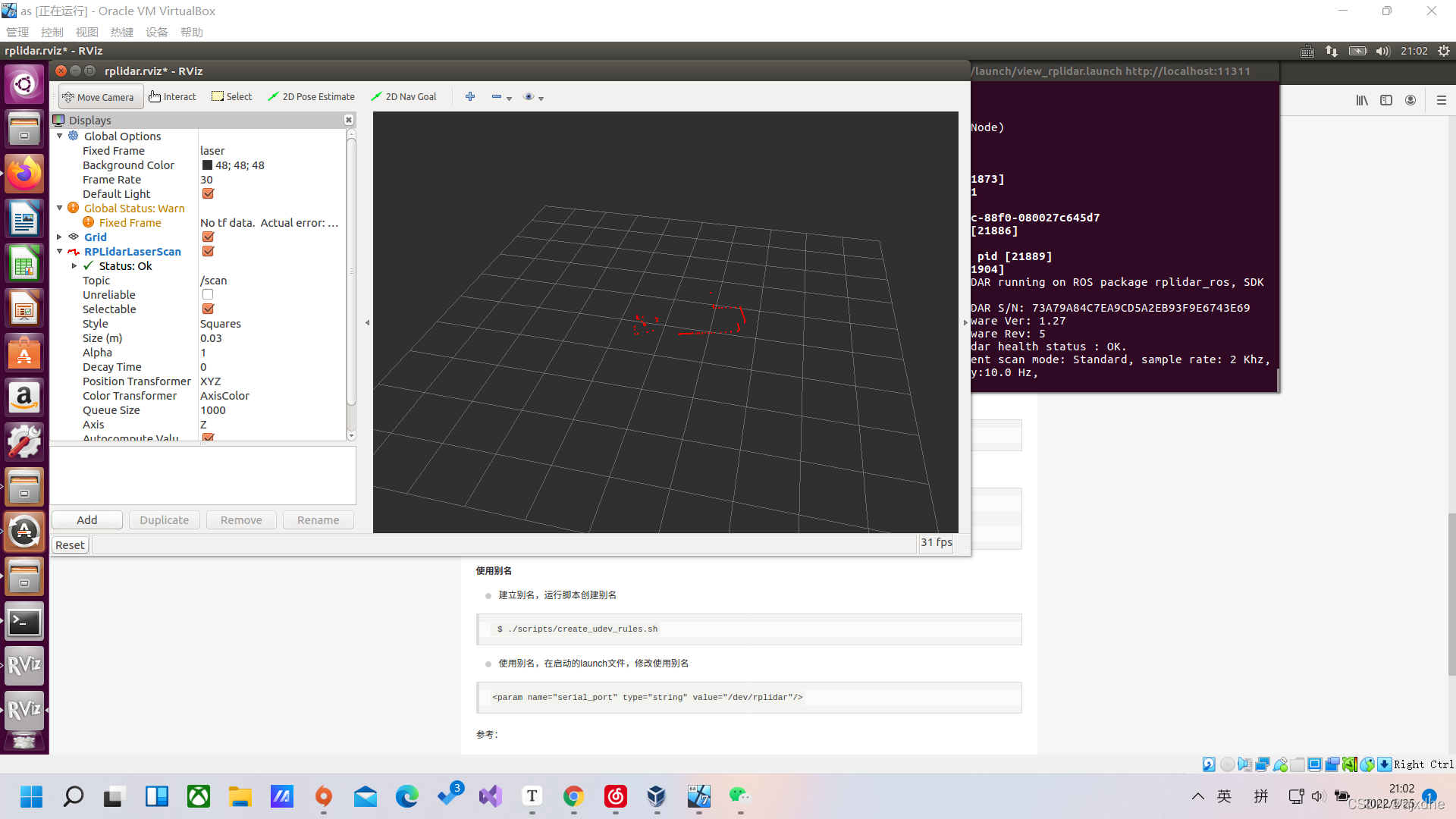
6.运行rplidar和并打开rviz查看
roslaunch rplidar_ros view_rplidar.launch
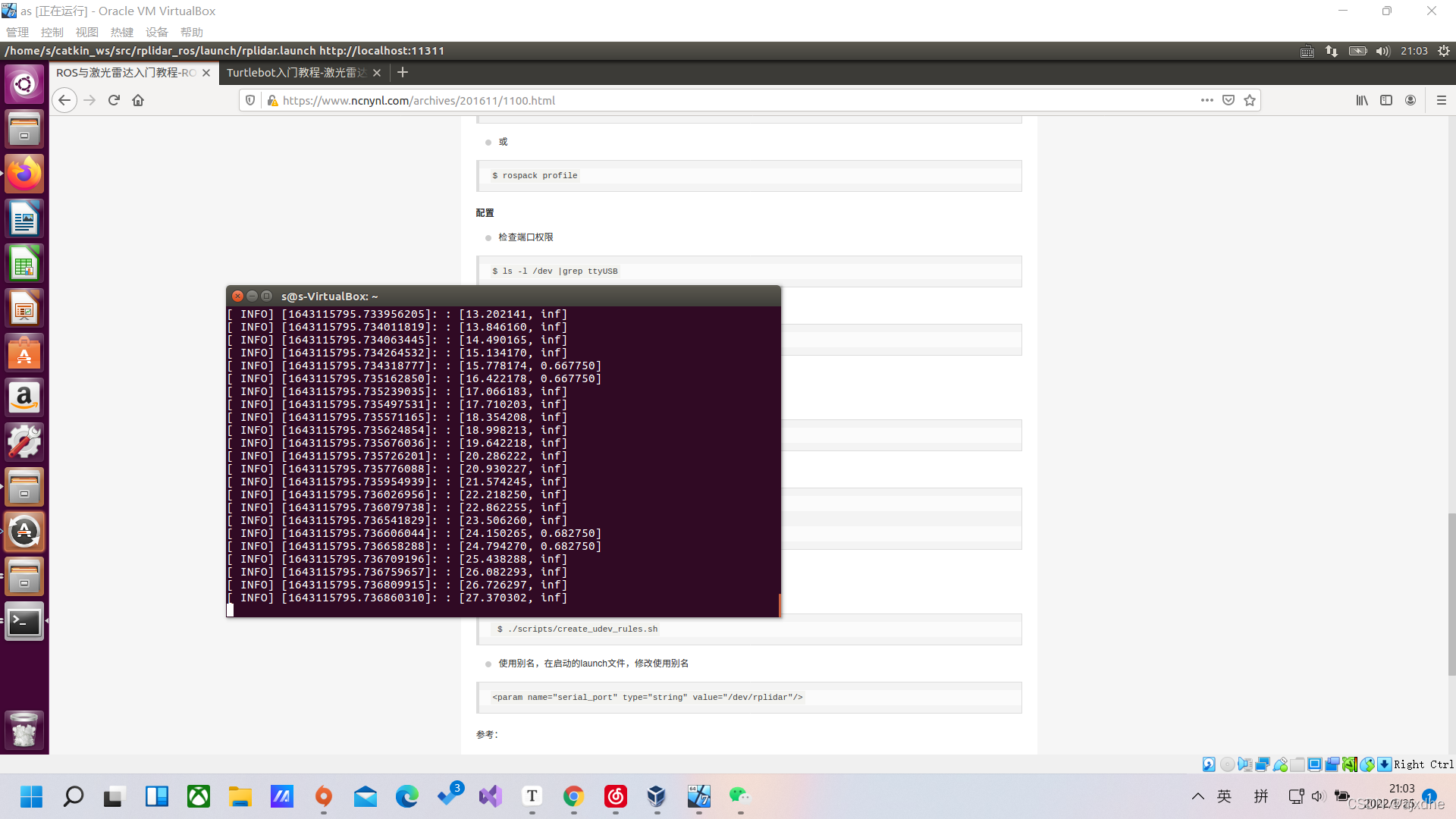
7.运行rplidar和查看测试应用
$ roslaunch rplidar_ros rplidar.launch # 新终端打开 $ rosrun rplidar_ros rplidarNodeClient

















 1611
1611

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









