






Matlab 基于IMM(CV匀速度+CS当前统计模型)和UKF无迹卡尔曼滤波/EKF扩展卡尔曼滤波的三维路径跟踪预测仿真
ID:98100785815005363
用户_40486707
Matlab在基于IMM(CV匀速度+CS当前统计模型)和UKF无迹卡尔曼滤波以及EKF扩展卡尔曼滤波的三维路径跟踪预测仿真中的应用
一、引言
在导航、制导和控制系统中,路径跟踪预测是一项关键任务。通过精确的路径跟踪预测,系统能够准确预测目标的位置和轨迹,从而实现精确的控制和导航。本文介绍了Matlab在基于IMM(CV匀速度+CS当前统计模型)和UKF无迹卡尔曼滤波以及EKF扩展卡尔曼滤波的三维路径跟踪预测仿真中的应用。
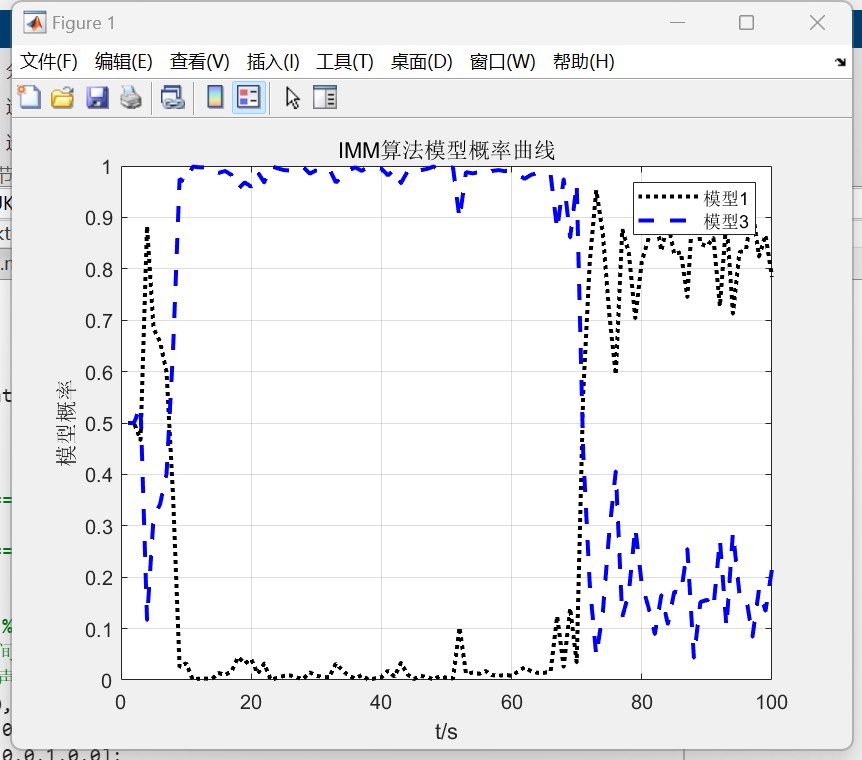
二、基于IMM(CV匀速度+CS当前统计模型)的路径跟踪预测
IMM(交互式多模型)方法是一种融合多种模型的方法,其中CV(匀速度)模型和CS(当前统计)模型是常用的两种模型。CV模型假设目标以恒定的速度移动,而CS模型则假设目标的速度和加速度符合某种统计分布。通过结合这两种模型,IMM方法能够在不同的情况下实现较为准确的路径跟踪预测。
在Matlab中,我们可以使用Simulink或Matlab的控制系统工具箱来实现基于IMM的路径跟踪预测。通过编写适当的Matlab代码,我们可以实现CV模型和CS模型的仿真,并通过交互式的方式将这两个模型结合起来,以实现更准确的路径跟踪预测。
三、UKF无迹卡尔曼滤波在路径跟踪预测中的应用
UKF(无迹卡尔曼滤波)是一种非线性滤波方法,它通过引入无迹变换来处理非线性问题。在路径跟踪预测中,由于目标的运动常常是非线性的,因此使用UKF方法能够更准确地处理这种情况。
在Matlab中,我们可以使用控制系统工具箱中的非线性控制设计模块来实现UKF滤波。通过编写适当的Matlab代码,我们可以实现UKF滤波器的设计和仿真,并将其应用于路径跟踪预测中。
四、EKF扩展卡尔曼滤波在路径跟踪预测中的应用
EKF(扩展卡尔曼滤波)是一种基于卡尔曼滤波的非线性滤波方法。它通过引入扩展状态变量和扩展观测方程来处理非线性问题。在路径跟踪预测中,由于目标的运动常常是非线性的,因此使用EKF方法能够更准确地处理这种情况。
在Matlab中,我们可以使用控制系统工具箱中的非线性控制设计模块来实现EKF滤波。通过编写适当的Matlab代码,我们可以实现EKF滤波器的设计和仿真,并将其应用于路径跟踪预测中。
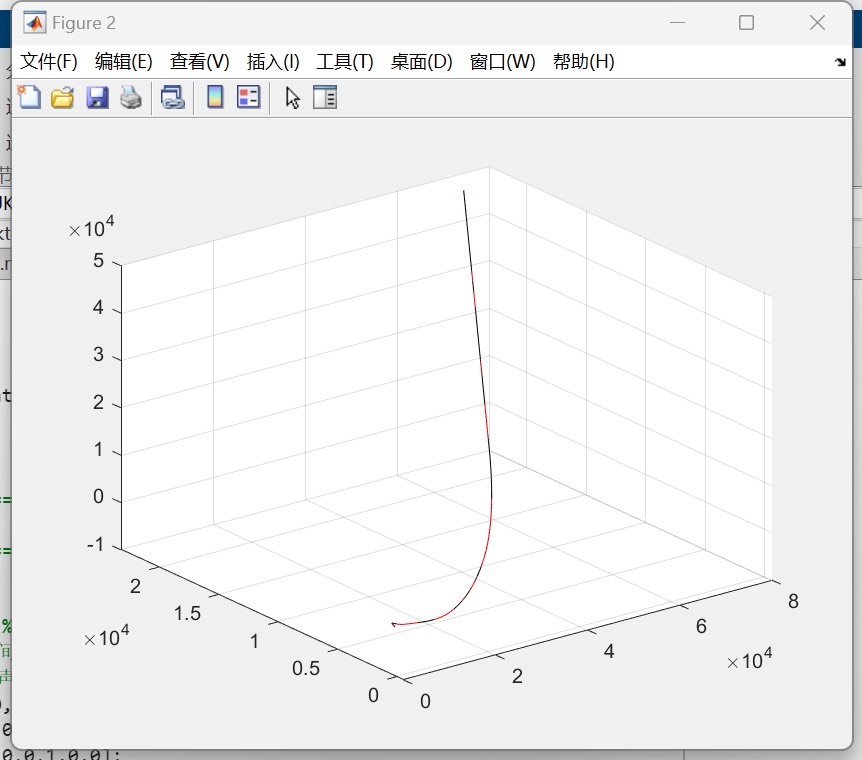
五、三维路径跟踪预测仿真
在三维空间中,路径跟踪预测需要考虑更多的因素,如目标的姿态、速度、加速度等。因此,三维路径跟踪预测比二维路径跟踪预测更加复杂。
在Matlab中,我们可以使用三维图形工具箱来创建三维仿真环境,并通过编写适当的Matlab代码来实现三维路径跟踪预测。在三维路径跟踪预测中,我们需要考虑目标的姿态、速度、加速度等因素,并使用适当的算法来实现准确的预测。
六、结论
在本文中,我们介绍了Matlab在基于IMM(CV匀速度+CS当前统计模型)和UKF无迹卡尔曼滤波以及EKF扩展卡尔曼滤波的三维路径跟踪预测仿真中的应用。通过Matlab的控制系统工具箱和非线性控制设计模块,我们可以实现路径跟踪预测中的关键算法,并将其应用于三维路径跟踪预测中。通过三维图形工具箱,我们可以创建三维仿真环境,并可视化路径跟踪预测的结果。这些工具和方法为路径跟踪预测提供了强大的支持,有助于我们实现更加准确和可靠的路径跟踪预测。
未来,我们可以进一步探索更先进的算法和工具,以提高路径跟踪预测的准确性和可靠性。同时,我们还可以将路径跟踪预测与其他领域的技术结合,如机器学习、深度学习等,以实现更加智能和高效的路径跟踪预测。
相关的代码,程序地址如下:http://matup.cn/785815005363.html
















 893
893

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









