







1.序言
刚刚打完电赛,做的是B题,现在回来恶补理论知识了,那么在这个过程中可谓相当痛苦,看了张兴老师的《PWM整流器及其控制》以及各类论文,都没有什么头绪,后面也是看了一些网友的帖子才豁然开朗,写这个帖子就是为了备忘以及方面后人入门,另本人水平较低,如出现错误请各位大佬老师联系我,我将及时就行修改以避免误导他人。
2.电路模型
2.1 三相并网逆变器拓扑
三相并网逆变器滤波器结构目前主要有L型和LCL型,我们这里仅讨论L型(因为LCL我还没搞出来等搞出来再写另外一篇吧哈哈哈,如果想看的话可以一键三连哈哈哈哈dog.gif),如果非常急着分析的可以阅读《LCL型并网逆变器的控制技术》。

上图为总控制框图,关于svpwm以及坐标变换的知识由于不在本次讨论范围内,所以不做详细说明。
2.2 电路模型

好了我又来鬼画符了,那么图中的Udq就是逆变器输出的电压,dq代表的是一个矩阵,请注意,是一个矩阵代表的是Ud和Uq两个分量,这是从三相静止坐标系到两相旋转坐标系得出来得的两个分量,不懂的请恶补,需要资料可以私信我~
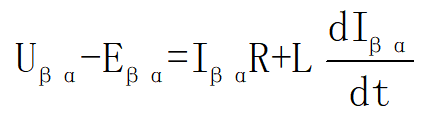
那么从电感的特性对上述回路进行分析,可得以下方程:
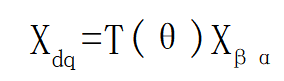
从两相静止坐标系下转换到两相旋转坐标系下,可以通过以下旋转矩阵来实现

各位看官不好意思,mathtype过期了,大家将就着看吧哈哈哈,那么代回到方程里面,就变换为:
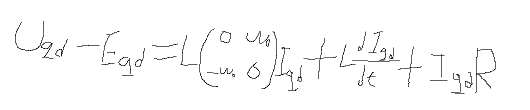
拆开后就可以写成
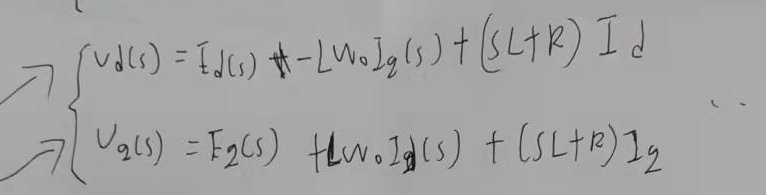
至此我们已经得到了系统的数学模型,我们可以看到d轴里面有q轴的分量,我们想要的是什么呢?没错就是q轴和d轴能独立的控制,Iq和Id代表啥?代表的是有功功率和无功功率,如果能独立控制岂不美哉?我就能分别指定无功功率输出多少有功功率输出多少,那么在今年电赛的B题中功率因素可调其实就是调节无功功率,功率因素为1就是无功功率为0,只输出有功功率,你可能要问我为什么题目中是整流器,今天讲的是逆变器你能扯上关系,欸其实无论整流还是逆变,在这个控制系统里面,都是一个控制逻辑,如果逆变器输出电流为你设定的正,那么你设置输出有功电流为1A那就逆变出去1A,如果你要整流,直流源换成负载,设置电流为-1A,就整流回去了,就那么简单,当然关于这道题我的解题思路到时候再跟你们说说哈哈哈,想看的赶紧一键三连~~~~
3.设计矫正器
好言归正传,我们在第二小节里面就已经求出了系统的数学模型,两个轴之间是耦合的,那么我们需要做解耦,那么我们就设计一个矫正器,他长这样

(感谢小麦的高清手机)这个矫正器可以用数学表达为:

id*就是idset,kp+ki/s就是pi调节器的传递函数,这个没啥好说的,这里就是你DSP里面写的内容,Ud和Uq可以通过锁相环的角度进行park反变换然后产生svpwm调制波emmm,这里的知识太过于庞大,有兴趣的自己去看下
4.系统传递函数
那么我们可以看到上面的得出来的是UdUq,也就是控制的是UdUq,我们设计这个逆变器为的是什么?为的就是控制逆变器输出的有功电流和无功电流呀,所以我们把UdUq带入到电路的传递函数中,也就是如下图

也就是把第四小节的方程带入到第三小节的方程,代入之后就能得到

于是乎我们就实现了解耦了!我们可以看到两个轴之间已经完全没有联系,kp和ki能独立调节,而且也消除了EdEq项,其实就是电网电压的因素,也就是说这个时候KPKI只与电路参数有关,那么我们还需要分析他的稳定性,我们求出输出电流的IdIq和他们设定值的传递函数,实际上就是对上面的公式进行一个变换,同时因为电感电阻一般比较小,所以我们为了方便就省略了它

5.稳定性分析(基于bode图和根轨迹图)
利用matble进行分析,代码如下所示
kp=10
ki=1
L=1*10^-3
wn=sqrt(ki/L)
z=ki/kp
x=kp/(L*2*wn)
s=tf('s');
G=(wn^2*(s+z))/(z*(s^2+2*x*wn*s+wn^2));
figure(1);
bode(G);
xlabel('频率f');title('波特图');
grid
figure(2);
rlocus(G);
xlabel('');title('根轨迹');
grid
figure(3);
t = 0:0.1:2;
y = step(G, t);
plot(t, y);
xlabel('时间(s)');title('阶跃响应');
grid
里面的kpki和电感值我是用我自己的参数,有需要的可以自己设置哈


那么从上面的bode图中可以看到无论是相位裕度还是幅值裕度都是非常满足的,甚至还有点像一个一阶系统,所以是稳定的。从根轨迹里面也能看到根轨迹都做左半平面也同样说明是稳定的。

从阶跃响应曲线也能看出,这其实很像一个一阶系统,虽然传递函数是二阶的,但是由于我设置的kpki问题,体现出来就这样,我们把kp调到0.01,阶跃响应就变成

那么这就是一个二阶系统的传递函数,从它有超调就能看出来了。
6.小结
本次分析中分析了L型三相逆变电路的数学模型,解耦以及稳定性的分析。也算是填了一个坑,那么接下来我还会分享广义二阶积分器的内容,当然前提是我能搞完。这篇博客是在学校图书馆写的,本人只是一个菜鸡大学生,文中如有纰漏请各位尽情过来“锤”我,如果这篇博客对你有帮助,请三连哈哈哈。关于电赛已经圆满结束,只拿了个国二,但是还是要感谢我的导师,我的团队,我的女朋友还有父母在这段时间内给予我的极大的帮助,非常感谢。如果你想进行沟通,询问,可扫码加个群,大家一起共同进步~群号为:974764233
















 5494
5494











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









