









通过深度值重建世界坐标,可以做出很多有意思的后处理效果,先实现下度值重建世界坐标这个功能。
一.验证重建效果
首先,得先找到一种证明反推回世界空间位置正确的方法。在相机前摆放几个物体,尽量使之在世界坐标下的位置小于1,方便判定颜色,然后将几个物体的shader换成如下的一个打印世界空间位置的shader:
//打印在世界空间位置
Shader "Universal Render Pipeline/Dejavu/ReconstructPositionWithDepth/WorldPosPrint"
{
SubShader
{
Tags { "RenderPipeline" = "UniversalPipeline" "RenderType" = "Opaque" }
LOD 300
ZWrite[_ZWrite]
Cull Off ZWrite On
Pass
{
Name "ForwardLit"
Tags{"LightMode" = "UniversalForward"}
HLSLINCLUDE
#include "Packages/com.unity.render-pipelines.universal/ShaderLibrary/Core.hlsl"
ENDHLSL
HLSLPROGRAM
#pragma vertex vert
#pragma fragment frag
struct appdata
{
float4 vertex : POSITION;
float2 uv : TEXCOORD0;
};
struct v2f
{
float3 worldPos : TEXCOORD0;
float4 vertex : SV_POSITION;
};
v2f vert(appdata v)
{
v2f o;
UNITY_SETUP_INSTANCE_ID(v);
UNITY_INITIALIZE_VERTEX_OUTPUT_STEREO(o);
o.vertex = TransformObjectToHClip(v.vertex);
o.worldPos = mul(unity_ObjectToWorld, v.vertex);
return o;
}
float4 frag(v2f i) : SV_Target
{
return float4(i.worldPos, 1.0);
}
ENDHLSL
}
Pass
{
Name "DepthOnly"
Tags{"LightMode" = "DepthOnly"}
ZWrite On
ColorMask 0
Cull[_Cull]
HLSLPROGRAM
#pragma exclude_renderers gles gles3 glcore
#pragma target 4.5
#pragma vertex DepthOnlyVertex
#pragma fragment DepthOnlyFragment
// -------------------------------------
// Material Keywords
#pragma shader_feature_local_fragment _ALPHATEST_ON
#pragma shader_feature_local_fragment _SMOOTHNESS_TEXTURE_ALBEDO_CHANNEL_A
//--------------------------------------
// GPU Instancing
#pragma multi_compile_instancing
#pragma multi_compile _ DOTS_INSTANCING_ON
#include "Packages/com.unity.render-pipelines.universal/Shaders/LitInput.hlsl"
#include "Packages/com.unity.render-pipelines.universal/Shaders/DepthOnlyPass.hlsl"
ENDHLSL
}
}
}得到的效果如下图所示,颜色代表了世界坐标位置。要注意的是URP中想要渲染Depth,需要Tags{"LightMode" = "DepthOnly"}这个Pass
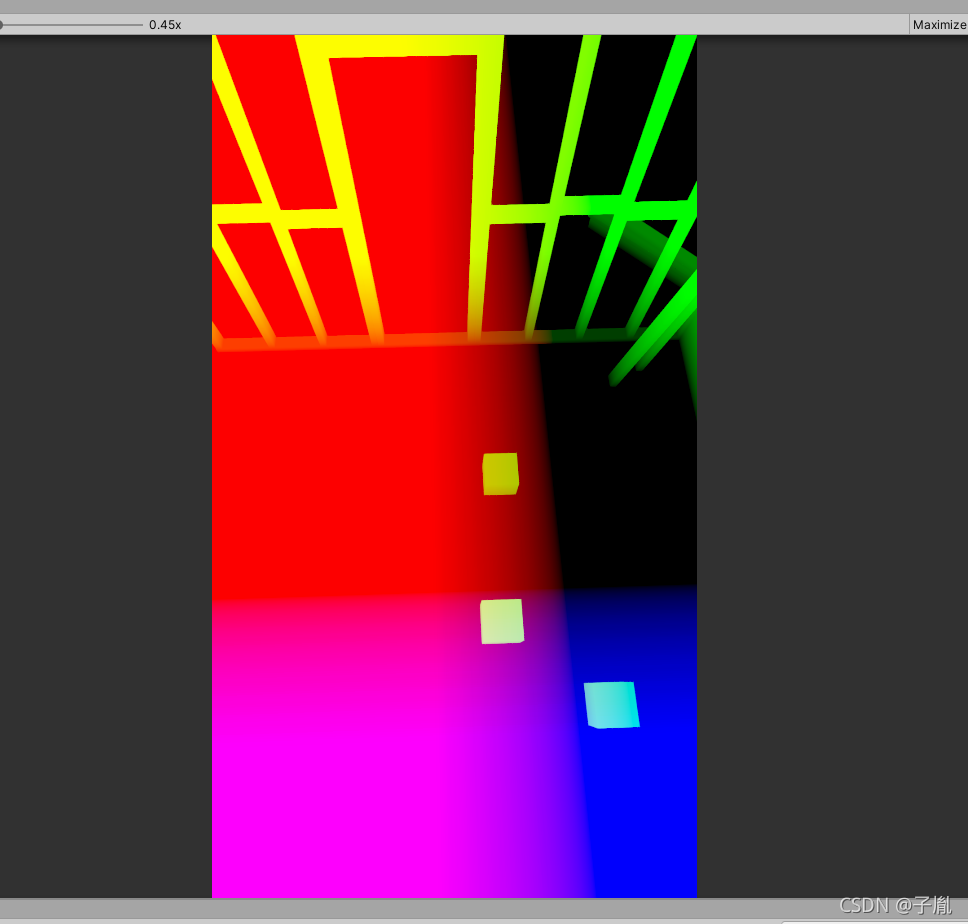
在之后的重建世界坐标位置的后处理Shader开启后,如果摄像机显示的没有变化,则证明重建成功
二.逆矩阵方式重建
世界坐标的重建有两种方法,最直观的一种就是通过VP逆矩阵,在fragment ShadeClip空间中的位置转换为世界坐标。该方法的核心步骤为:
1.通过uv和深度图中采样的深度信息,构建NDC中坐标位置,从而构建Clip空间中位置
2.NDC坐标乘以逆矩阵即可得到世界坐标。
fragment中的代码为:
//fragment shader
float4 frag(v2f i) : SV_Target
{
float sceneRawDepth = SAMPLE_DEPTH_TEXTURE(_CameraDepthTexture, sampler_CameraDepthTexture, i.uv);
float4 ndc = float4(i.uv.x * 2 - 1, i.uv.y * 2 - 1, sceneRawDepth, 1);
#if UNITY_UV_STARTS_AT_TOP
ndc.y *= -1;
#endif
float4 worldPos = mul(UNITY_MATRIX_I_VP, ndc);
worldPos /= worldPos.w;
return worldPos;
}
看起来比较简单,但是其中有一个/w的操作,如果按照正常思维来算,应该是先乘以w,然后进行逆变换,最后再把world中的w抛弃,即是最终的世界坐标,不过实际上投影变换是一个损失维度的变换,我们并不知道应该乘以哪个w,所以实际上上面的计算,并非按照理想的情况进行的计算,而是根据计算推导而来。具体推导:How to go from device coordinates back to worldspace in OpenGL (with explanation)
已知条件(M为VP矩阵,M^-1即为其逆矩阵,Clip为裁剪空间,ndc为标准设备空间,world为世界空间):
ndc = Clip.xyzw / Clip.w = Clip / Clip.w
world = M^-1 * Clip
二者结合得:
world = M ^-1 * ndc * Clip.w
我们已知M和ndc,然而还是不知道Clip.w,但是有一个特殊情况,是world的w坐标,经过变换后应该是1,即
1 = world.w = (M^-1 * ndc).w * Clip.w
进而得到Clip.w = 1 / (M^ -1 * ndc).w
带入上面等式得到:
world = (M ^ -1 * ndc) / (M ^ -1 * ndc).w
优化
上边的shader代码中,自己通过uv和深度构建了ndc坐标,但是实际上Unity URP提供了ComputeWorldSpacePosition函数可以直接调用(函数位置在core rp中的Common.hlsl):
float3 ComputeWorldSpacePosition(float2 positionNDC, float deviceDepth, float4x4 invViewProjMatrix)
{
float4 positionCS = ComputeClipSpacePosition(positionNDC, deviceDepth);
float4 hpositionWS = mul(invViewProjMatrix, positionCS);
return hpositionWS.xyz / hpositionWS.w;
}其中的omputeClipSpacePosition函数也在core rp中的Common.hlsl中:
float4 ComputeClipSpacePosition(float2 positionNDC, float deviceDepth)
{
float4 positionCS = float4(positionNDC * 2.0 - 1.0, deviceDepth, 1.0);
#if UNITY_UV_STARTS_AT_TOP
// Our world space, view space, screen space and NDC space are Y-up.
// Our clip space is flipped upside-down due to poor legacy Unity design.
// The flip is baked into the projection matrix, so we only have to flip
// manually when going from CS to NDC and back.
positionCS.y = -positionCS.y;
#endif
return positionCS;
}最终,我们的Shader只需要:
//fragment shader
float4 frag(v2f i) : SV_Target
{
float sceneRawDepth = SAMPLE_DEPTH_TEXTURE(_CameraDepthTexture, sampler_CameraDepthTexture, i.uv);
float3 worldPos = ComputeWorldSpacePosition(i.uv, sceneRawDepth, UNITY_MATRIX_I_VP);
return float4(worldPos, 1);
}代码立刻显得很清爽,ComputeWorldSpacePosition实际内容和自己上边写的shader是一致的
Bonus
以上的方法中,用到了UNITY_MATRIX_I_VP这个矩阵,在一些博主写的文章中,用的方式是从C#端将camera的VP逆矩阵传入shader中:
var vpMatrix = Camera.main.projectionMatrix * Camera.main.worldToCameraMatrix;
之后传入vpMatrix.inverse
在shader中使用该矩阵进行重建时,如果代码还按照上边的shader中写,是无法正确还原的。
纠其原因,是因为Camera.main.projectionMatrix * Camera.main.worldToCameraMatrix的逆矩阵并不和UNITY_MATRIX_I_VP一致,UNITY_MATRIX_I_VP是和平台无关的,而Camera相关的矩阵,是和Opengl还是directx等相关的,在opengl的模式下,重建还原代码如下,注意的是sceneRawDepth也进行了*2-1的操作,这是因为opengl的z范围是-1到1。
//fragment shader
float4 frag(v2f i) : SV_Target
{
float sceneRawDepth = SAMPLE_DEPTH_TEXTURE(_CameraDepthTexture, sampler_CameraDepthTexture, i.uv);
#if defined(UNITY_REVERSED_Z)
sceneRawDepth = 1 - sceneRawDepth;
#endif
float4 ndc = float4(i.uv.x * 2 - 1, i.uv.y * 2 - 1, sceneRawDepth * 2 - 1, 1);
float4 worldPos = mul(_InverseVPMatrix, ndc);
worldPos /= worldPos.w;
return worldPos;
}
小结
1.这种方式重建世界坐标,性能比较差,一般来说,我们都是逐顶点地进行矩阵运算,毕竟定点数一般还是比较少的,但是全屏幕逐像素进行矩阵运算,这个计算量就不是一般的大了,性能堪忧。
2.能用Unity提供的API就用其提供的,Unity封装和处理了很多跨平台的情况,比如Z的范围,左手右手坐标系等,自己撸极容易出错。
三.射线方式重建
原理
这种方式的重建,可以参考Secrets of CryENGINE 3 Graphics Technology这个CryTech 2011年的PPT。借用一张图:
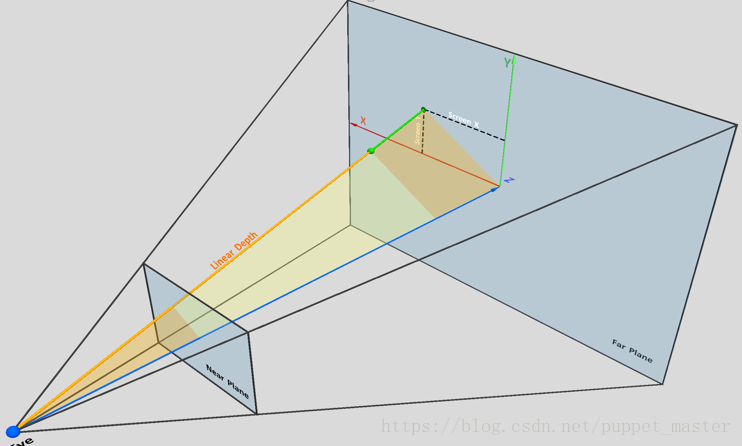
然后偶再画个平面的图:

上图中,A为相机位置,G为空间中我们要重建的一点,那么该点的世界坐标为A(worldPos) + 向量AG,我们要做的就是求得向量AG即可。根据三角形相似的原理,三角形AGH相似于三角形AFC,则得到AH / AC = AG / AF。由于三角形相似就是比例关系,所以我们可以把AH / AC看做01区间的比值,那么AC就相当于远裁剪面距离,即为1,AH就是我们深度图采样后变换到01区间的深度值,即Linear01Depth的结果d。那么,AG = AF * d。所以下一步就是求AF,即求出相机到屏幕空间每个像素点对应的射线方向。
如何获得AF呢,在后处理Shader中,实际上就是绘制了一个Quad,对应整个屏幕。这个Quad的四个边界点刚好对应屏幕的四个边界点,uv是(0,1)区间的,刚好对应屏幕空间,我们通过*2 - 1将其转化到(-1,1)区间就可以得到四个边界对应NDC坐标系下的xy坐标了,在VertexShader中计算出这4个点对应的射线后,将其传入FragmentShader中,通过插值就会自动得到每个像素点对应的AF。
Frament中还原:
//fragment shader
float4 frag(v2f i) : SV_Target
{
float sceneRawDepth = SAMPLE_DEPTH_TEXTURE(_CameraDepthTexture, sampler_CameraDepthTexture, i.uv);
float linear01Depth = Linear01Depth(sceneRawDepth, _ZBufferParams);
float3 worldPos = _WorldSpaceCameraPos.xyz + ( linear01Depth) * i.viewRayWorld ;
return float4(worldPos, 1);
}
VertexShader中计算射线:
方法1
用ComputeWorldSpacePosition方法,计算四个顶点对应的世界坐标位置,减去摄像机位置后就是所求射线。这种方式还是很好理解的,每个顶点矩阵运算也只有一次,个人感觉是最优方案。
//vertex shader
v2f vert(appdata v)
{
v2f o;
UNITY_SETUP_INSTANCE_ID(v);
UNITY_INITIALIZE_VERTEX_OUTPUT_STEREO(o);
o.positionCS = TransformObjectToHClip(v.positionOS.xyz);
//方法1
float sceneRawDepth = 1;
#if defined(UNITY_REVERSED_Z)
sceneRawDepth = 1 - sceneRawDepth;
#endif
float3 worldPos = ComputeWorldSpacePosition(v.uv, sceneRawDepth, UNITY_MATRIX_I_VP);
o.viewRayWorld = worldPos - _WorldSpaceCameraPos.xyz;
o.uv = v.uv;
return o;
}
方法2
原理和方法1一样,只是先由clip空间转到View空间,再由View空间转到摄像机空间。其中_InverseVMatrix是由C#端传入的Camera.main.worldToCameraMatrix.inverse。
那么为什么不能直接使用Unity中的UNITY_MATRIX_I_V呢,因为后处理Shader中,Unity根本不会为你设置UNITY_MATRIX_I_VP,UNITY_MATRIX_I_VP是单位矩阵。
v2f vert(appdata v)
{
v2f o;
UNITY_SETUP_INSTANCE_ID(v);
UNITY_INITIALIZE_VERTEX_OUTPUT_STEREO(o);
o.positionCS = TransformObjectToHClip(v.positionOS.xyz);
float4 clipPos = ComputeClipSpacePosition(v.uv, 0);
float4 viewPos = mul(UNITY_MATRIX_I_P, clipPos);
viewPos.xyz = viewPos.xyz / viewPos.w;
float3 worldPos = mul(_InverseVMatrix, viewPos).xyz;
o.viewRayWorld = worldPos - _WorldSpaceCameraPos.xyz;
o.uv = v.uv;
return o;
}方法3
这次我们不求得四个顶点在世界空间中的位置,而是在View空间中,以射线的方式做逆变换,因为在view空间中,camera的位置为0,所以viewpos就是viewRay的方向。射线的逆变换要注意的是,只需要3X3的3维矩阵,要排除掉平移变换的影响,因为射线无论如何平移,都是一样的射线
v2f vert(appdata v)
{
v2f o;
UNITY_SETUP_INSTANCE_ID(v);
UNITY_INITIALIZE_VERTEX_OUTPUT_STEREO(o);
o.positionCS = TransformObjectToHClip(v.positionOS.xyz);
//方法3
float4 clipPos = ComputeClipSpacePosition(v.uv, 0);
float4 viewPos = mul(UNITY_MATRIX_I_P, clipPos);
float3 viewRay = viewPos.xyz / viewPos.w;
o.viewRayWorld = mul((float3x3)_InverseVMatrix, viewRay);
o.uv = v.uv;
return o;
}最终结果
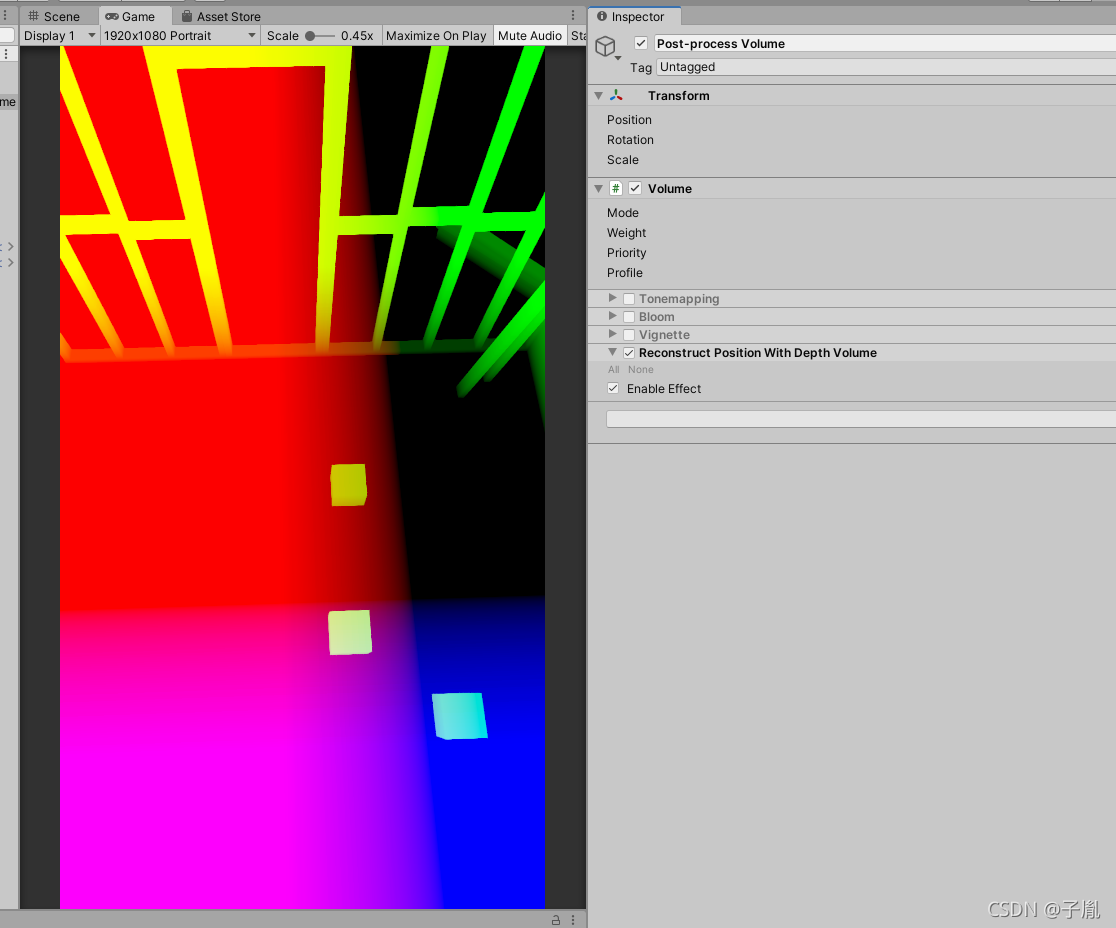
无论用那种方式,开关后处理效果,都能发现场景是相同效果,证明重建成功!
完整工程代码
GitHub - Dejavu0709/StudyForShader 中的ReconstructPositionWithDepth文件夹
相关资料:感谢大佬们的无私分享
Reconstruct the world space positions of pixels from the depth texture | Universal RP | 10.5.1

















 984
984

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









