







双目视觉系统设计及测量误差估计
针对双目相机用于测距时的误差不确定等问题,特查阅一些误差估计的文献,对双目系统的搭建、标定及最终精度误差建模深入研究,以提高其在三维重建中测距中的准确度,并将收获总结如下:
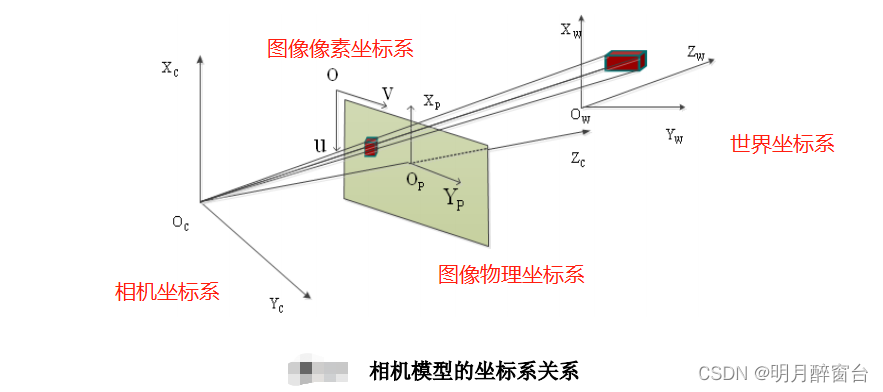
1.视觉系统四个坐标系
2.结构模式
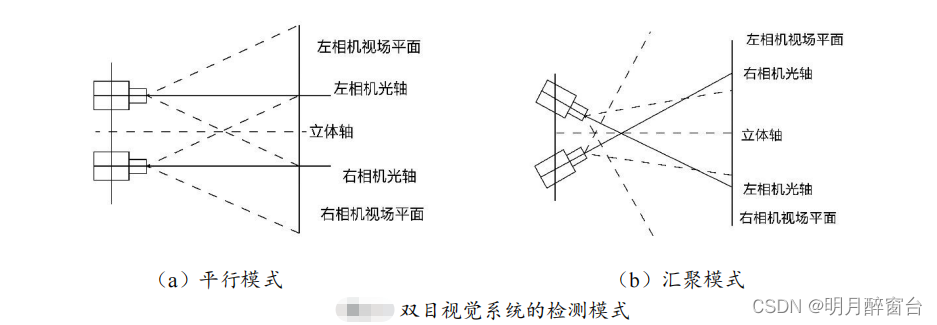
根据双目视觉系统中两个相机的空间位置结构不同,其检测方式可分为平行模式与汇聚模式两种[32]。平行模式是由两个光轴严格平行、规格相同的相机组成,也是标准的双目视觉系统模型。只要能得到空间中任一点在两个相机上的投影点,就可以通过视差原理求解出这一点的空间坐标。汇聚模式是将两个相机根据实际需求按照某一角度摆放,两个相机的光轴不需要保持水平。在运算时,需要额外计算两个相机的相对位姿,但对于相机的摆放没有严格要求,且两个相机的倾斜角度也不需要严格一致
3.双目视觉系统设计
3.1.基于穹顶结构的双目视觉模型
参考:基于多目视觉的机械臂测量关键技术研究 --郑玥

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











