






 本文介绍了如何在Windows环境下配置Robotics Library (RL) 与Visual Studio 2019,以及RL库的主要接口和功能,包括基本结构、算法、硬件接口、运动学、碰撞检测、可视化和路径规划等。RL是一个用于机器人运动规划和控制的C++库,广泛应用于研究和教育项目。
本文介绍了如何在Windows环境下配置Robotics Library (RL) 与Visual Studio 2019,以及RL库的主要接口和功能,包括基本结构、算法、硬件接口、运动学、碰撞检测、可视化和路径规划等。RL是一个用于机器人运动规划和控制的C++库,广泛应用于研究和教育项目。
Robotics Library 配置VS2019 及 API概述

-
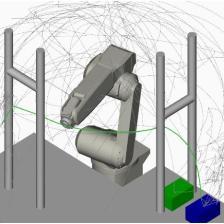
机器人c++库机器人库(RL)是一个独立的c++库,用于机器人运动学、运动规划和控制。它涵盖了数学、运动学和动力学、硬件抽象、运动规划、碰撞检测和可视化。
-
它被几个研究项目(如JAHIR、JAMES、JAST、SMErobotics)和教育领域使用,在BSD许可下可用,在商业应用中免费使用。
-
RL可以在所有机器上运行,从实时打补丁的Linux到Windows桌面电脑。它使用CMake作为一个构建系统,可以用GCC和Visual Studio编译。
1. Windows下RL库配置VS2019
本人用的ide是vs2019,故以此为例
前提是在windows下安装了RL的demo桌面版 https://www.roboticslibrary.org/download

- **VC++目录: 配置安装目录下的rl include **
- 库

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 1273
1273

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











