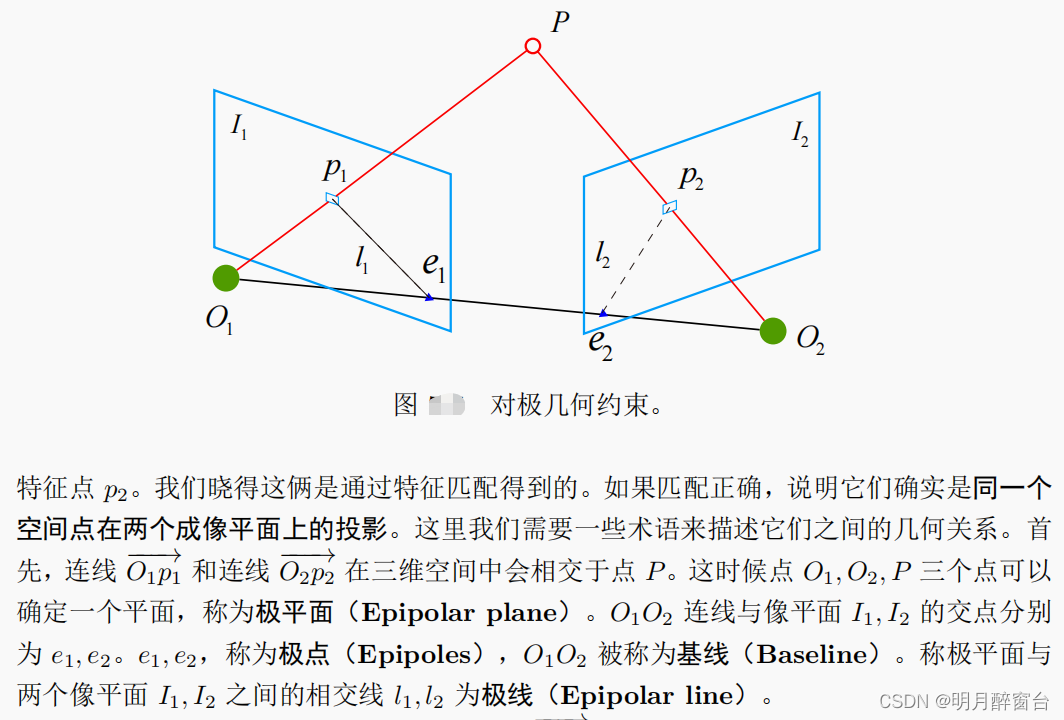
视觉SLAM笔记五之详解对极几何:对极约束、本质矩阵、单应矩阵 简介 当相机为单目时,我们只知道2D的像素坐标,因而问题是根据两组2D点估计运动,该问题用对极几何来解决。 当相机为双目、RGB-D时,或者我们通过某种方法得到了距离信息,那问题就是根据两组3D点估计运动,该问题常用ICP来解决。 如果我们有3D点和他们在相机的投影位置,也能估计相机的运动,该问题用PnP求解。 本节主要详细介绍对极几何。 1.对极几何 1.1 对极约束 对极约束简洁地给出了两个匹配点的空间位置关系。于是,相机位姿估计问题变为以下两步:









 订阅专栏 解锁全文
订阅专栏 解锁全文
















 1064
1064











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








