






终于把感知方面的目标跟踪写完了,这部分的内容较多,也比较复杂。今天开始写感知方面的最后一块内容——传感器标定。
1.为什么要进行传感器标定
为了更全面的获取环境信息,无人驾驶的感知系统需要使用多个同构或异构传感器实现数据的采集。那么这些传感器的安装位置和姿态不尽相同,因此在对传感器数据进行处理之前,必须对传感器本身以及传感器之间进行标定,从而建立传感器与无人车之间以及传感器之间的空间位置关联。
2.常见的传感器标定分类
(1)视觉相机标定
(2)三维激光雷达标定
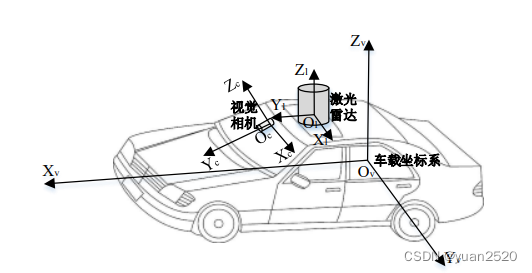
(3)视觉相机与激光雷达联合标定
举图说明吧,具体可以看下下图,为一个视觉相机与激光雷达联合标定。















 712
712











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









