






上一篇写了为什么要进行传感器标定以及常见的传感器标定分类;但无人驾驶系统一般会基于多种传感器整合的系统,每个传感器的坐标体系都有些不同。为了能够更好地融合信息,需要一个标准坐标系,然后将其它坐标系下的物体都转换到标准坐标系中。在无人驾驶技术中,一般以车载坐标系作为标准坐标系。今天这篇主要讲讲车载坐标系。
1.什么是车载坐标系
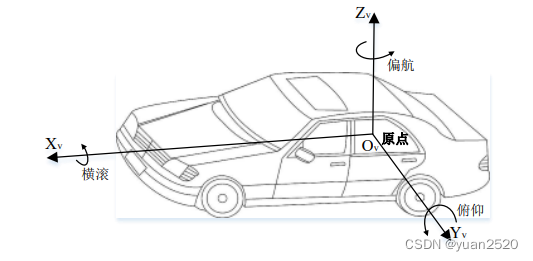
车载坐标系可以描述周围物体和车体之间的相对位置和相对速度关系。定义一个坐标系需要明确七个参量,即 X 轴、Y 轴、Z 轴、 横滚、俯仰、偏航以及坐标系原点位置。
2.车载坐标系定义
目前比较常用的车载坐标系定义有三个,分别是SAE 汽车工程协会定义、基于惯性测量单元的 IMU 定义、ISO 国际标准定义。如图为他们之间的区别。

举例说明,如下图为ISO 坐标系。















 2721
2721











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









