







 本文介绍了百度Apollo的自动驾驶定位技术,包括基于信号的GNSS定位、惯性导航及融合定位、环境特征匹配的激光定位,并重点讲解了多传感器融合定位系统,强调了定位在自动驾驶中的关键作用以及各种定位技术的优缺点。最后提到了视觉定位作为辅助手段,讨论了其应用和局限性。
本文介绍了百度Apollo的自动驾驶定位技术,包括基于信号的GNSS定位、惯性导航及融合定位、环境特征匹配的激光定位,并重点讲解了多传感器融合定位系统,强调了定位在自动驾驶中的关键作用以及各种定位技术的优缺点。最后提到了视觉定位作为辅助手段,讨论了其应用和局限性。
本文大部分内容转载自百度的自动驾驶公开课的内容,原文链接:https://www.csdn.net/article/a/2018-04-25/15946813
L4/L5无人车为什么需要精确的定位系统?精确是指厘米级,也就是说10厘米以内。如果人开车的话,会关注什么?我们会关注车道线、道路指示牌、红绿灯这些交通标识,路肩、路边柱子,建筑物,这些都是场景中的静态物体,关注它们是因为人需要知道车的可行使范围、以及需要规划车的行驶路径。我们还会关注一些动态的物体,比如对面开过来的摩托车。
定位系统可以与高精地图配合提供静态场景感知,可将感知得到的动态物体正确放入静态场景,而位置和姿态用于路径规划和车辆控制。因此定位系统对于无人驾驶至关重要。
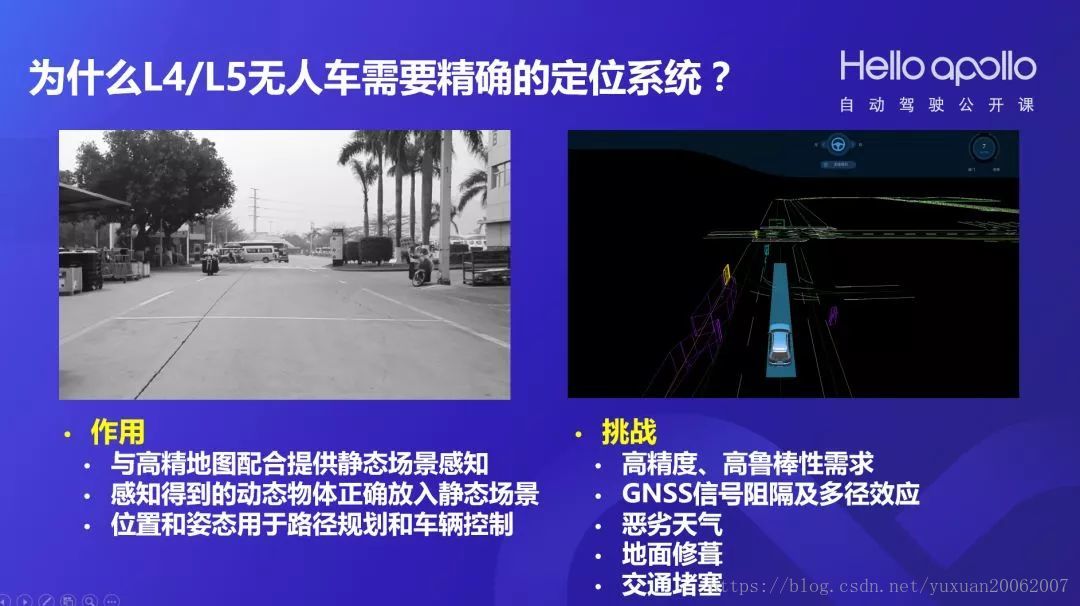
而要获得精确的定位,也面临很多挑战,譬如:定位需要非常高精度和高鲁棒性;GPS信号遇到阻隔会引起信号丢失;在复杂的城市环境中,由于建筑物和植物的存在,引起多镜效应导致定位不准;由于天气情况,或者人为修缮,会导致定位精度不高。
三种定位技术
了解了定位系统的重要性,我们来看看定位技术的分类。
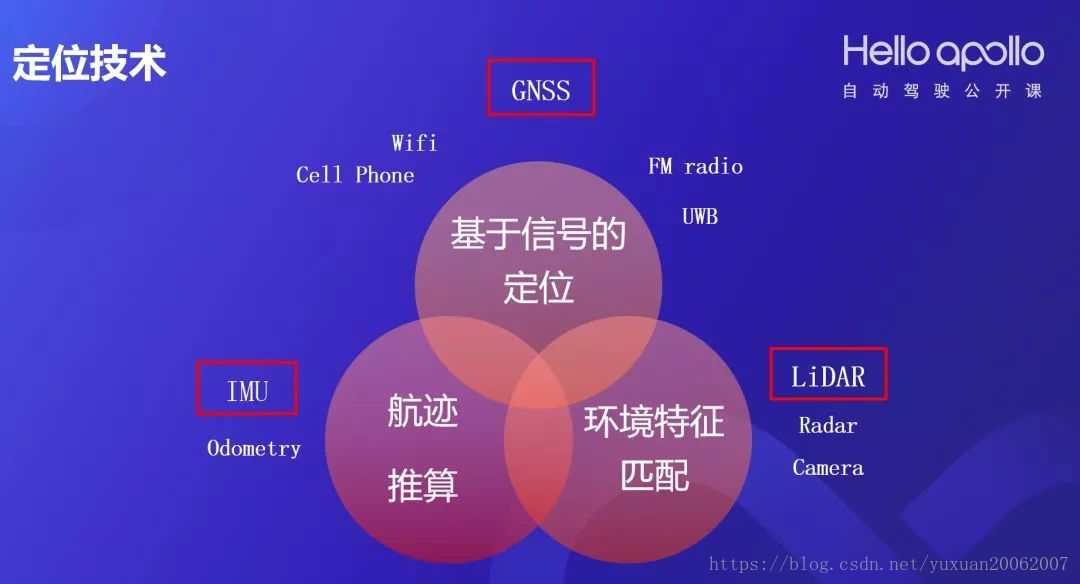
从定位方式上可分为三类。
第一类,基于信号的定位,它的代表就是GNSS,其实就是全球导航卫星系统;
第二类,航迹推算,依靠IMU等,根据上一时刻的位置和方位推断现在的位置和方位;
第三类是环境特征匹配,基于Lidar的定位,用我们观测到的特征和数据库里的特征和存储的特征进行匹配,得到现在车的位置和姿态。
这三种定位方式各有优劣。
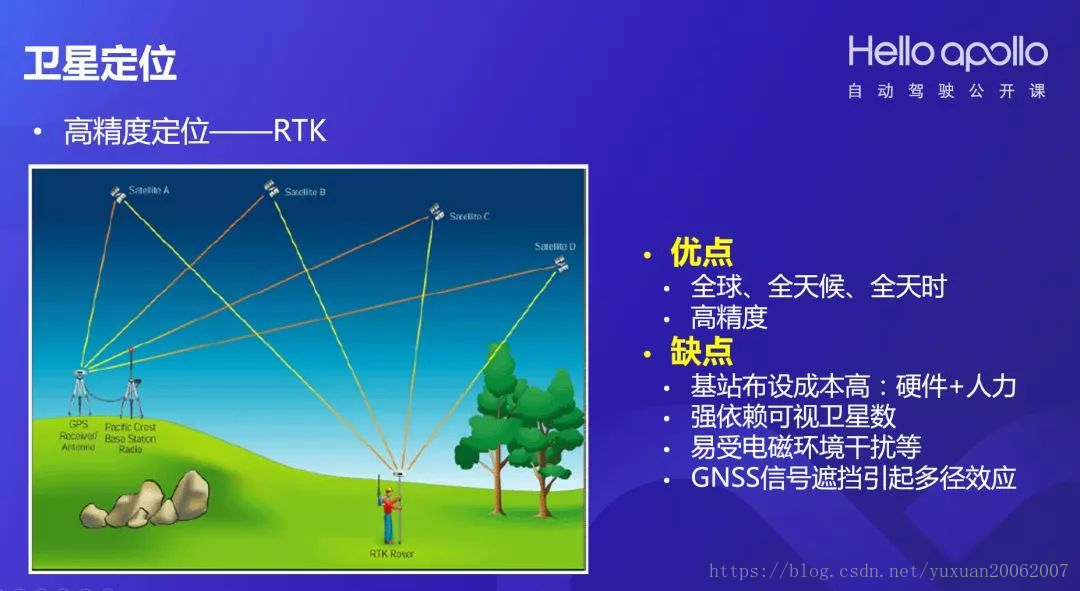
第一种卫星定位,RTK差分技术出现后,精度稳步提高。差分技术,是在一个精确的已知位置(基站)上安装GNSS监测接收机,计算得到基站与GNSS卫星的距离校正。差分分为位置差分和距离差分。RTK差分可以达到厘米级定位。RTK存在的问题有:基站铺设成本较高;非常依赖卫星数量,比如在一些桥洞和高楼大厦的环境下,可视的卫星数量会急剧下降;容易受到电磁环境干扰。在受到遮挡时,信号丢失,没有办法做定位。
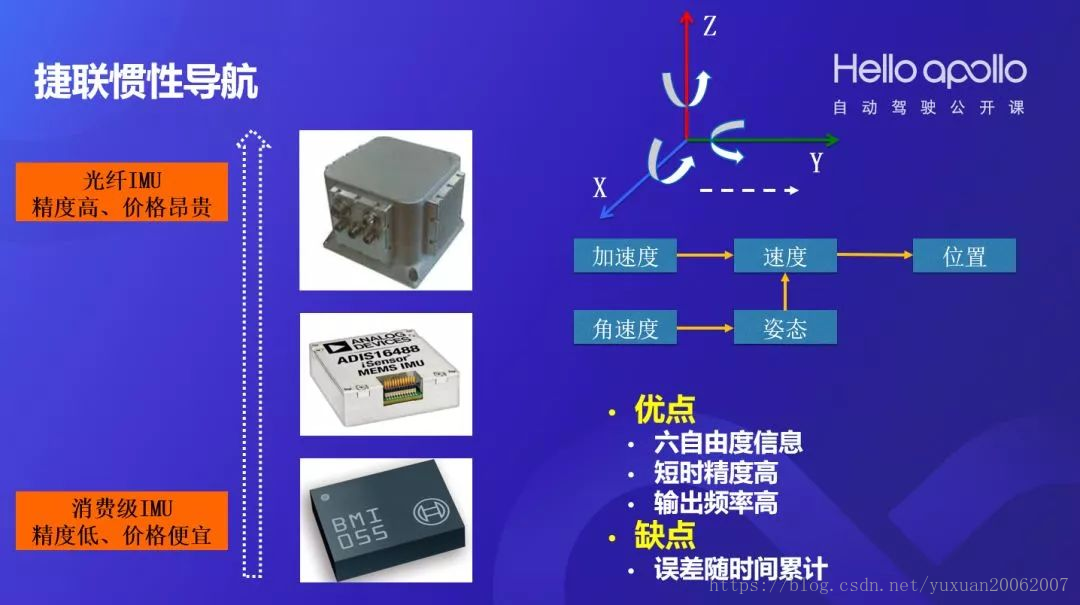
第二种捷联惯性导航( SINS),是利用惯性测量元件(陀螺仪、加速度计)测量得到的载体相对于惯性空间角运动和线运动参数,经过惯性导航解算得到载体的速度、位置、姿态。捷联是相对于平台来说的。惯性测量单元(IMU)主要由陀螺仪和加速度计组成。加速度计能够测量出载体相对于惯性空间所受的力;陀螺仪能够测量出载体沿陀螺仪轴向的旋转角速度或旋转增量。IMU是惯性导航系统的基础,直接决定了惯性导航系统所能够达到的精度。
惯性导航(简称惯导
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2143
2143

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









