







ROS Industrial:
官网:Description — ROS-Industrial (rosindustrial.org)
GitHub:ROS-Industrial (github.com)
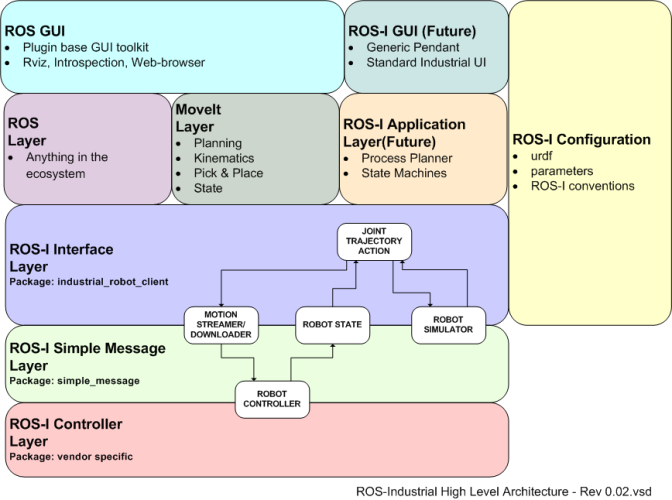
ROS Industrial是一个基于ROS的工业自动化软件框架,它提供了机器人路径规划、控制和任务调度等工业自动化功能。ROS Industrial可适用于多种工业机器人,如机械臂、AGV等。
ROS Control:
GitHub:ros-controls/ros_control: Generic and simple controls framework for ROS (github.com)
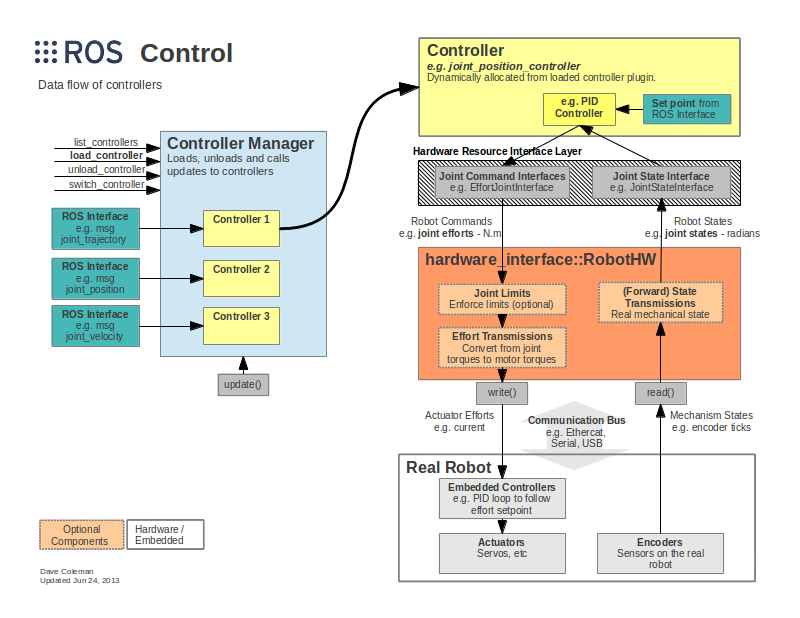
ROS Control是ROS中用于实现机器人控制的软件包。它提供了一组通用的控制接口和工具,用于设计、模拟和部署机器人控制器。ROS Control的目标是使机器人控制器开发变得更加容易,同时提供高质量、稳定和可靠的控制器。
ROS Control的核心组件是控制器管理器(Controller Manager),它负责加载、卸载、切换和调度控制器,以及处理控制器之间的协同作用。控制器管理器使用插件架构,可以与不同类型的机器人和传感器进行集成。
ROS Control还包括一些常见的控制器,如关节位置控制器(Joint Position Controller)、关节速度控制器(Joint Velocity Controller)和关节力控制器(Joint Effort Controller)。这些控制器提供了不同的控制方式,可以根据机器人的不同需求进行选择和配置。
除了控制器管理器和控制器,ROS Control还提供了许多其他组件,如控制器调试工具、状态发布器和机器人状态接口等。这些组件可以帮助开发人员快速地设计和测试机器人控制器。
Autoware:
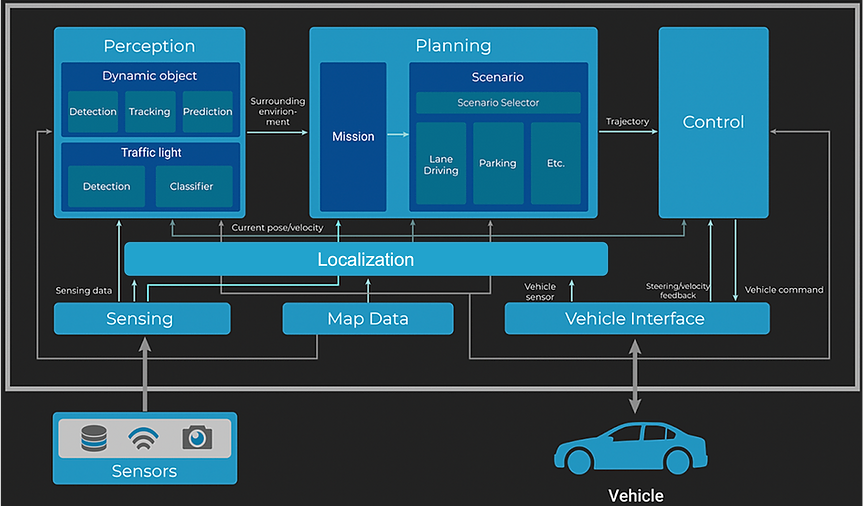
Autoware是一款基于ROS的开源自动驾驶软件套件,由日本Tier IV公司主导开发,旨在为无人驾驶技术提供一套完整、易于使用的软件解决方案。Autoware提供了从感知、定位、规划到控制等全方位的自动驾驶功能,具有高度的可配置性和可扩展性,可适应多种硬件平台和各种应用场景。
Autoware的功能包括但不限于:
激光雷达点云处理
摄像头图像处理
3D物体检测和跟踪
高精度地图构建和使用
定位和自定位
多传感器数据融合
规划和路径跟踪
车辆控制和模拟
遥控驾驶模式
Autoware提供了一些现成的组件,例如pcl、OpenCV、NDT匹配算法等,使得使用者可以快速地将它们组装成自己的自动驾驶系统。此外,Autoware还提供了GUI界面、3D可视化工具、ROS节点的可视化调试器等工具,以方便使用者进行开发和调试。
值得一提的是,Autoware支持多种车辆类型,如小车、无人机、货车等,并能够适应不同的应用场景,如城市道路、高速公路等。目前,Autoware已被广泛应用于无人驾驶车辆、物流配送、无人机等领域,成为开发自动驾驶系统的重要工具之一。
ArduPilot:
官网:ArduPilot - Versatile, Trusted, Open
GitHub:ArduPilot/ardupilot: ArduPlane, ArduCopter, ArduRover, ArduSub source (github.com)
ArduPilot是一款开源无人机自动驾驶系统软件,它可以运行在各种硬件平台上,如基于ARM、x86、FPGA和DSP等的嵌入式平台,并且完全免费使用。ArduPilot是一款模块化的软件,由不同的模块组成,其中包括飞行控制模块、导航模块、传感器模块等,每个模块都提供了丰富的参数和配置选项,以便于用户进行二次开发和定制。
ArduPilot的主要功能包括:
无人机的飞行控制,支持多种飞行模式,如手动、稳定、自动、定点等。
自动导航,支持GPS导航和视觉导航,可以自动进行航线规划、避障和任务执行。
状态估计和控制,利用传感器数据进行无人机状态的估计和控制。
传感器支持,ArduPilot支持多种传感器,如GPS、气压计、陀螺仪、加速度计、磁力计等,以提供更为精准的定位和姿态估计。
数据记录和遥测,ArduPilot可以记录传感器数据、飞行数据和地图数据,并支持通过无线电、4G网络等方式实时传输数据到地面站进行监控和调试。
除了基本的功能外,ArduPilot还支持多种扩展模块和插件,如光流模块、机载计算机模块、人工智能模块等,以满足不同应用场景下的需求。目前,ArduPilot已被广泛应用于多个领域,如农业、物流、监测和科研等。同时,ArduPilot社区也在不断地更新和完善软件,以满足不断变化的用户需求。

ROS Navigation Stack:
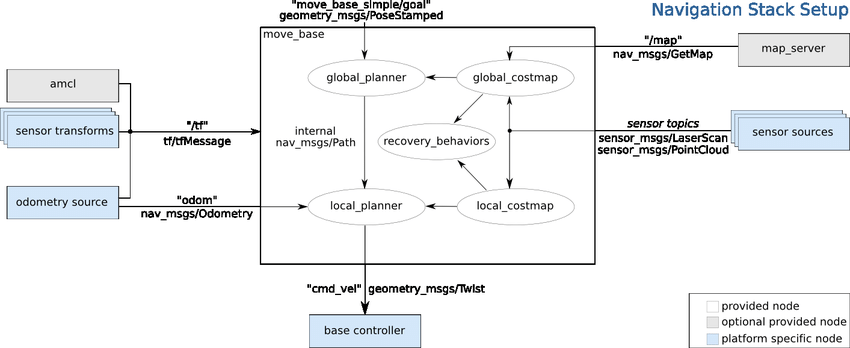
ROS Navigation Stack是ROS中一个用于移动机器人导航的软件包,包含了多个模块,如地图构建、自主定位和导航规划等。ROS Navigation Stack的主要目标是为移动机器人提供实时且可靠的自主导航,使得机器人能够在未知或动态环境下实现高效的路径规划和导航。
ROS Navigation Stack主要包含以下几个模块:
map_server:地图服务器,用于构建机器人所在环境的地图。
amcl:自主定位模块,基于机器人搭载的传感器,实现机器人在已知地图中的自主定位。
move_base:导航规划模块,基于已知地图和自主定位信息,规划机器人到达目标点的最优路径。
costmap_2d:代价地图模块,将环境中的障碍物和不可通行区域转换为代价值,作为导航规划的考虑因素之一。
global_planner和local_planner:全局路径规划和局部路径规划模块,分别用于规划机器人从起点到终点的全局路径和在实时环境变化下的局部路径。
使用ROS Navigation Stack,可以方便地对移动机器人进行路径规划和导航,并在实时环境变化下做出相应的调整,如避开动态障碍物、重新规划路径等。同时,ROS Navigation Stack也支持多种传感器类型和导航算法,如里程计、激光雷达、深度相机等,以满足不同应用场景下的需求。
需要注意的是,ROS Navigation Stack需要较高的计算和存储资源,以保证导航的实时性和可靠性,因此需要根据具体的硬件平台和应用需求进行合理的配置和优化。
MoveIt!:
官网:MoveIt Motion Planning Framework (ros.org)
Wiki:moveit - ROS Wiki
GitHub:ros-planning/moveit: The MoveIt motion planning framework (github.com)
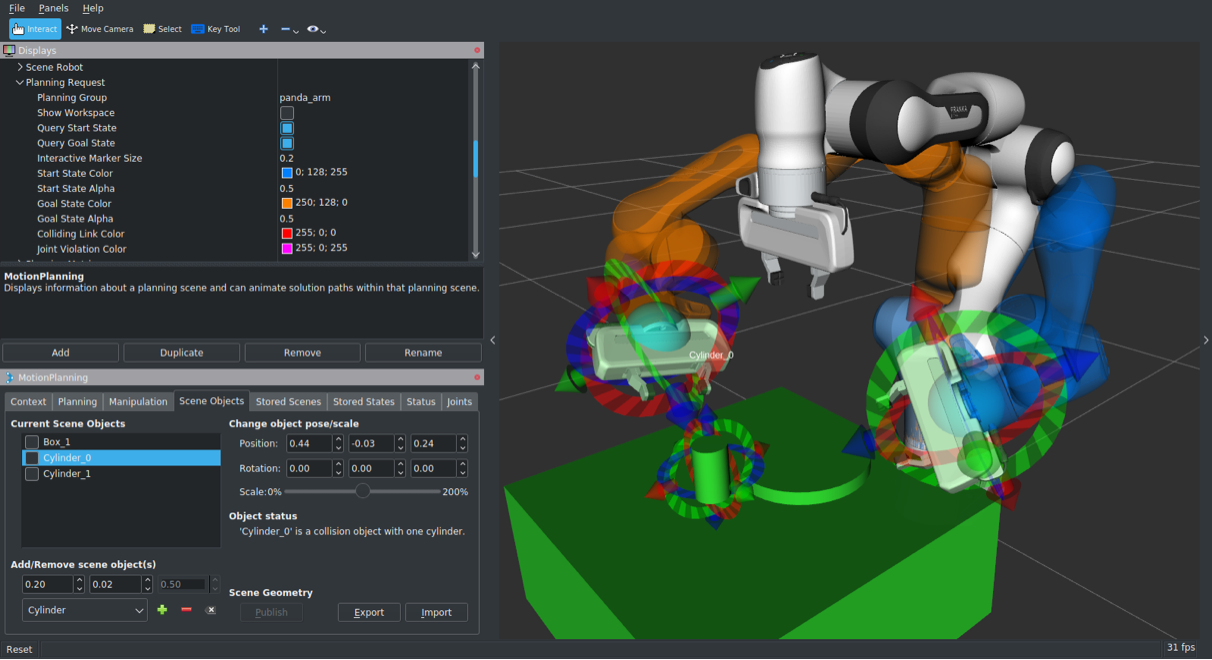
MoveIt是ROS中一个用于机器人运动规划和控制的软件包,主要用于解决机器人操作中的规划、运动控制和碰撞检测等问题。MoveIt支持多种机器人类型,包括工业机器人、服务机器人、移动机器人等,也支持多种传感器类型,如激光雷达、视觉传感器等。
MoveIt主要包含以下几个模块:
Robot Model:机器人模型模块,用于建立机器人的几何模型和运动学模型。
Planning Scene:规划场景模块,用于建立机器人操作的环境场景,并提供碰撞检测和运动规划的相关信息。
Motion Planning:运动规划模块,用于生成机器人的合法运动轨迹,避免机器人与障碍物的碰撞。
Kinematics:运动学模块,用于求解机器人的关节运动学问题,包括正解和逆解问题。
Trajectory Execution:轨迹执行模块,用于控制机器人沿着生成的轨迹进行实际运动。
使用MoveIt,可以方便地对机器人进行运动规划和控制,包括机械臂的轨迹规划、夹爪的姿态控制、机器人的机械臂和底盘协同运动等。同时,MoveIt还提供了图形化界面和API接口,方便用户进行操作和集成到自己的应用中。
需要注意的是,MoveIt需要根据具体机器人的硬件平台和应用场景进行适当的配置和参数调整,以达到最优的运动规划和控制效果。
MAVROS:
官网:Home - MAVROS Tutorial (masoudir.github.io)
Wiki:mavros - ROS Wiki
GitHub:mavlink/mavros: MAVLink to ROS gateway with proxy for Ground Control Station (github.com)
MAVROS是ROS中用于与MAVLink协议兼容的飞行器(例如Pixhawk等)通信的软件包。MAVLink是一种轻量级的通信协议,用于在自主飞行器和地面站之间进行通信。
MAVROS提供了ROS接口,允许开发者使用ROS中的机器人控制和运动规划功能来控制和规划飞行器的运动。通过MAVROS,开发者可以方便地将ROS生态系统中的其他软件包和功能集成到无人机应用中,实现从传感器数据采集到运动规划控制的全套无人机应用功能。
MAVROS支持多种无人机操作模式,例如手动控制、姿态控制、位置控制、自主飞行、追踪目标等。此外,MAVROS还提供了常用的传感器数据接口,例如GPS、惯性测量单元(IMU)、磁力计等,方便用户获取无人机的状态信息和环境信息。
MAVROS仅适用于与MAVLink协议兼容的飞行器,对于其他类型的无人机需要使用不同的软件包。
PX4:
官网:Open Source Autopilot for Drones - PX4 Autopilot
GitHub:PX4 Autopilot for Drones (github.com)
PX4是一个开源的自主无人机(UAV)软件平台,提供了完整的飞行控制和任务控制功能。PX4平台由Swiss ETH大学(瑞士联邦理工学院)发起并维护,目前已经成为了最受欢迎的无人机软件之一。
PX4的特点包括高可扩展性、实时性和可定制性。其基础系统包括飞行控制器、传感器以及执行器,可以针对特定的应用场景进行定制。PX4还支持多种无人机型号,包括多旋翼、固定翼、VTOL(垂直起降与水平飞行)、直升机等。
PX4提供了一个简单易用的图形用户界面(QGroundControl),用于配置和监控飞行器,以及执行任务和地面站控制。同时,PX4还提供了多种编程接口和开发工具,例如MAVLink协议、ROS接口、MATLAB和Simulink等。
PX4的飞行控制算法是基于最新的控制理论和实践研究,支持多种自动化控制模式和飞行模式,例如手动控制、自稳模式、定高模式、位置模式、姿态模式、自主飞行模式、跟随模式等。
PX4还需要使用MAVLink协议进行通信,因此需要飞行器支持MAVLink协议。
OpenSLAM:
官网:OpenSLAM.org (openslam-org.github.io)
GitHub:OpenSLAM (github.com)
OpenSLAM是一个用于机器人自主导航和地图构建的开源库。该库提供了多种SLAM算法,包括基于激光雷达和视觉传感器的算法,可以适用于各种机器人类型和应用场景。

















 8580
8580

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









