









 本文详细介绍了如何在Linux系统上安装海康机器视觉工业相机的SDK以及ROS驱动。首先,从官网下载MVSV2.1.2Linux版SDK并根据系统类型进行安装。然后,通过catkin_make编译并安装ROS驱动,同时需将缺失的库文件复制到指定目录。最后,修改配置文件中的相机序列号并运行launch文件以查看图像。如果遇到nodata错误,应检查USB接口是否为3.0版本。
本文详细介绍了如何在Linux系统上安装海康机器视觉工业相机的SDK以及ROS驱动。首先,从官网下载MVSV2.1.2Linux版SDK并根据系统类型进行安装。然后,通过catkin_make编译并安装ROS驱动,同时需将缺失的库文件复制到指定目录。最后,修改配置文件中的相机序列号并运行launch文件以查看图像。如果遇到nodata错误,应检查USB接口是否为3.0版本。
一、海康SDK安装
1. 官网下载机器视觉工业相机客户端MVS V2.1.2(Linux)

2. 安装:
根据自己的操作系统选择对应的安装包,
.deb安装包通过dpkg命令安装,
.tar.gz安装包通tar命令解压后,再执行setup.sh脚本进行安装。
3. 验证:
安装过程很快,结束之后执行以下命令便可启动客户端查看相机画面。
cd /opt/MVS/bin
./MVS.sh
二、ROS驱动安装
1. 下载ROS驱动,编译安装
mkdir -p MVS_WS/src
cd MVS/src
git clone https://github.com/ChongjianYUAN/mvs_ros_pkg.git
cp mvs_ros_pkg/lib/libGCBase_gcc421_v3_0.so /opt/MVS/lib/64 #运行的时候发现缺少这个库,所以提前拷贝过去了,若运行发现缺少其他库执行类似操作
cd ..
catkin_make 2. 修改配置文件中的相机序列号,运行launch文件即可看到image。
roslaunch mvs_ros_pkg mvs_camera.launch 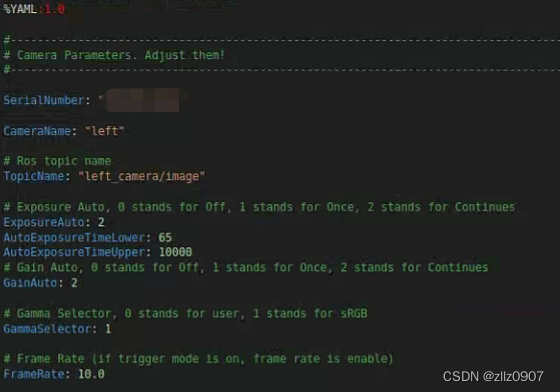
3. 如果运行launch时,报错no data。请检查USB是否为3.0接口。


















 2479
2479

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









