







1、问题描述
在安装ROS的过程中,很多小伙伴可能会发现,在输入rosdep init 或 rosdep update指令时有时会提示以下错误:
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
2、问题原因
对于上述问题,其主要原因是网络问题(无法科学访问raw.githubusercontent.com)。
3、常规解决方案
1)开启手机热点访问
电脑通过手机热点进行网络访问,下载过程可以多试几次,最后有可能会成功,但根据我之前的使用经历,该方式成功率并不太高。
2)修改hosts方式:
通过域名解析工具查询 https://raw.githubusercontent.com的实际IP地址,将该IP添加到hosts中,但此方法可能会失效。
4、靠谱解决方案(屡试不爽)
总体思路:既然访问https://raw.githubusercontent.com并不稳定,那我们将相关资源先备份到访问速度较快的第三方代码托管平台(本文使用国内资源Gitee,国内利用Gitee可以实现加速访问GitHub仓库),修改 rosdep 源码,再重新定位资源。
1)修改 gedit 20-default.list
进入到 sources.list.d 文件夹(如果没有,则新建)
修改 gedit 20-default.list
cd /etc/ros/rosdep/sources.list.d
sudo gedit 20-default.list
将里面所有的
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/openwork2020/rosdistro/raw/master
相应部分修改后:
# os-specific listings first rosdep update
yaml https://gitee.com/openwork2020/rosdistro/raw/master/rosdep/osx-homebrew.yaml osx
# generic
yaml https://gitee.com/openwork2020/rosdistro/raw/master/rosdep/base.yaml
yaml https://gitee.com/openwork2020/rosdistro/raw/master/rosdep/python.yaml
yaml https://gitee.com/openwork2020/rosdistro/raw/master/rosdep/ruby.yaml
gbpdistro https://gitee.com/openwork2020/rosdistro/raw/master/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead
2)修改 gbpdistro_support.py
进入到 rosdep2 文件夹,
修改 gbpdistro_support.py
cd /usr/lib/python2.7/dist-packages/rosdep2/
sudo gedit gbpdistro_support.py
将里面所有的
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/openwork2020/rosdistro/raw/master
相应部分修改后:
FUERTE_GBPDISTRO_URL = 'https://gitee.com/openwork2020/rosdistro/raw/master/releases/fuerte.yaml'
3)修改 rep3.py
进入到 rosdep2 文件夹,
修改 rep3.py
cd /usr/lib/python2.7/dist-packages/rosdep2/
sudo gedit rep3.py
将里面所有的
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/openwork2020/rosdistro/raw/master
相应部分修改后:
REP3_TARGETS_URL = 'https://gitee.com/openwork2020/rosdistro/raw/master/releases/targets.yaml'
4)修改 sources_list.py
进入到 rosdep2 文件夹,
修改 sources_list.py
cd /usr/lib/python2.7/dist-packages/rosdep2/
sudo gedit sources_list.py
将里面所有的
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/openwork2020/rosdistro/raw/master
相应部分修改后:
DEFAULT_SOURCES_LIST_URL = 'https://gitee.com/openwork2020/rosdistro/raw/master/rosdep/sources.list.d/20-default.list'
5)修改 init.py
进入到 rosdistro 文件夹
修改 init.py
cd /usr/lib/python2.7/dist-packages/rosdistro/
sudo gedit __init__.py
将里面所有的
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/openwork2020/rosdistro/raw/master
相应部分修改后:
DEFAULT_INDEX_URL = 'https://gitee.com/openwork2020/rosdistro/raw/master/index-v4.yaml'
6)方案验证
鼠标右键打开新终端(或快捷键:Ctrl + Alt + T),执行以下更新命令:
rosdep update
若出现下方提示,则表示该方案有效!
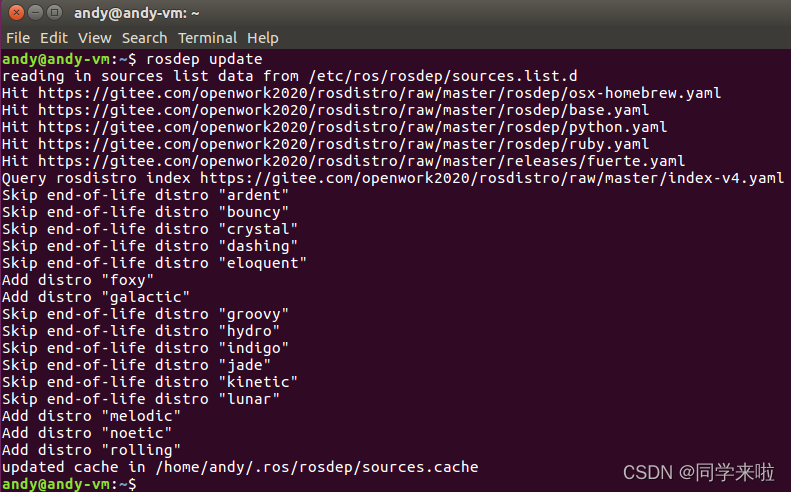
说明:本人将官方rosdistro项目资源拉取到Gitee上,访问网址为:https://gitee.com/openwork2020/rosdistro,欢迎大家可以访问使用,当然也可以使用自己的Gitee或其他第三方托管平台等资源。
















 1422
1422











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











