







 文章详细阐述了PWM模式1和模式2在不同极性下的工作原理,特别是在中心对齐模式下如何设置高电平占空比以及如何利用更新中断进行任务执行。中心对齐模式在SVPWM驱动无刷电机时能提供理想的波形效果,文中提到可以使用HAL_TIM_SetCompare函数来设置占空比,并通过HAL_TIM_Base_Start_IT启动更新中断。
文章详细阐述了PWM模式1和模式2在不同极性下的工作原理,特别是在中心对齐模式下如何设置高电平占空比以及如何利用更新中断进行任务执行。中心对齐模式在SVPWM驱动无刷电机时能提供理想的波形效果,文中提到可以使用HAL_TIM_SetCompare函数来设置占空比,并通过HAL_TIM_Base_Start_IT启动更新中断。
PWM模式:
PWM模式1,向上计数时,PWM信号从有效电平变为无效电平
PWM模式2,向上计数时,PWM信号从无效电平变为有效电平
PWM极性:
极性为高时,高电平为有效电平,低电平为无效电平
极性为低时,低电平为有效电平,高电平为无效电平
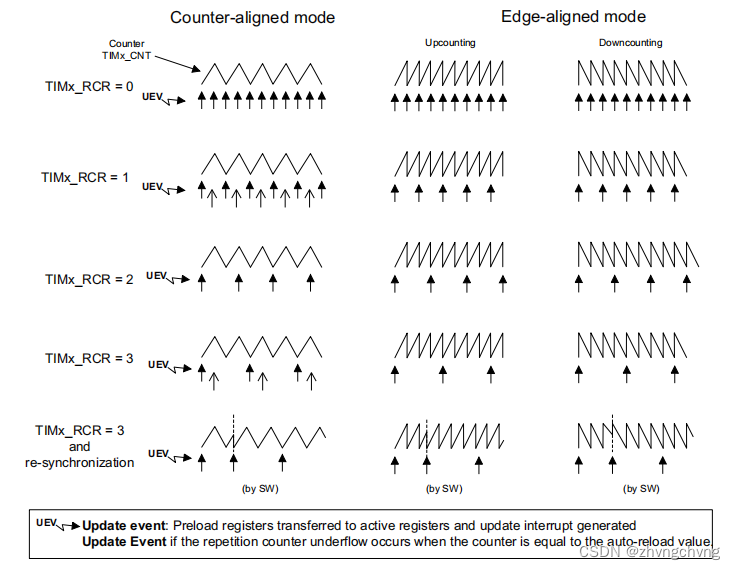
中心对齐模式(先向上再向下计数):
1:仅在向下计数时产生比较中断
2:仅在向上计数时产生比较中断
3:向下和向上计数均产生比较中断
中心对齐模式PWM频率是普通模式的一半,会产生上溢和下溢两个update事件,均可触发更新中断。
设定RCR的值,可以使计数器累积多少次再产生中断。比如设定RCR为1,则中心对齐模式会经过一次上溢和一次下溢才产生中断。
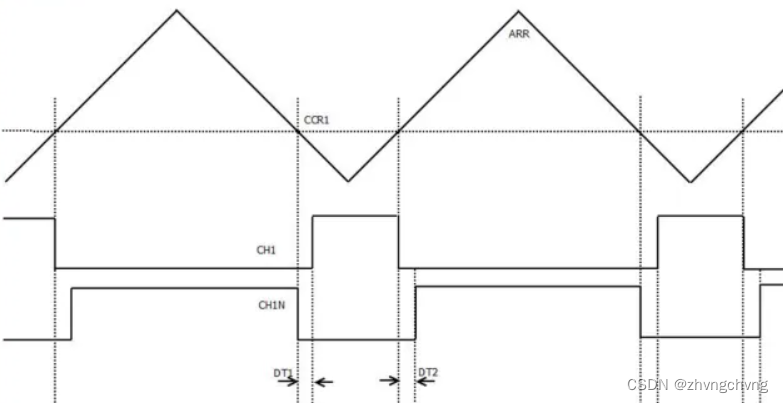
SVPWM驱动无刷电机时,采用中心对齐的PWM模式能够取得好的驱动效果。默认采用中心对齐模式1即可。由于中心对齐模式先向上计数再向下计数,在极性为高的情况下,采用PWM模式1会得到中间低电平、两边高电平的调制波形,如图所示。而我们期望SVPWM的波形为中间高电平、两边低电平,因此需要选择PWM模式2。
在极性为高的PWM模式2下,设置高电平占空如下
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, (1-duty_a)*TIM1_COUNT);
其中,duty_a是高电平的占空比。
将RCR设为1,这样我们能够在每个PWM周期结束时(即计数器向下溢出时)触发一次更新中断,执行相应的任务。
当然也可以不设置RCR,而是在中断中读取计数器的count值的大小来判断此次更新中断为上溢还是下溢。
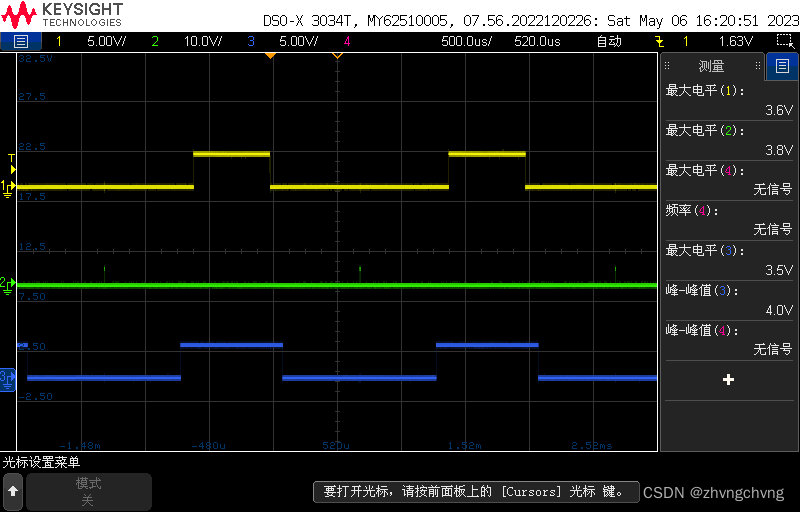
上图显示了两个通道的PWM输出,并且在更新中断里翻转GPIO来表示更新中断触发。使用基本定时器函数HAL_TIM_Base_Start_IT(&htim1)来开启更新中断。
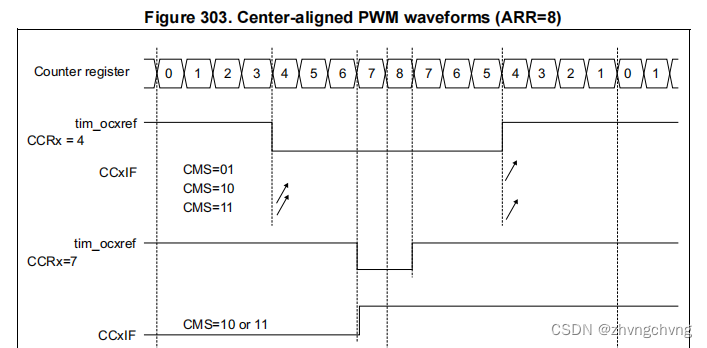
值得注意的是,使用中心对齐模式在配置计数值时,ARR的值并不需要-1。按照官方手册的描述,若设定ARR=8,则计数值0到7为向上计数,计数值8到1为向下计数,无论向上还是向下计数都是8个计数周期。



















 1565
1565

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











