







1. 背景与原理
重复控制(Repetitive Control, RC)是一种适用于周期性信号跟踪和周期性扰动抑制的控制方法,通过在控制回路中引入周期补偿器来提高系统的控制精度。将 RC 与 PID 控制相结合,利用 PID 的快速响应特性和 RC 的周期补偿特性,可以实现对周期性信号的高精度控制,尤其适合在伺服系统、电机控制等应用场景中使用。
2. 核心思想
目标:
在经典 PID 控制的基础上,通过重复控制器补偿周期性误差,增强控制精度和稳定性。
特点:
- PID 控制器处理快速动态响应,提供基础控制性能。
- 重复控制器根据误差的周期性特征,构造补偿信号,修正系统的稳态误差。
3. 控制系统框架
3.1 系统组成
- PID 控制器:
- 提供基础控制功能。
- 负责非周期性误差的快速响应。
- 重复控制器:
- 针对周期性扰动进行精确补偿。
- 基于上一周期的误差构造补偿信号。
- 被控对象:
- 非线性或线性动态系统,具有周期性输入或干扰。
3.2 框图描述
控制系统框图包含以下模块:
- 参考输入:期望信号 r(t)r(t)r(t)。
- 误差计算器:计算跟踪误差 e(t)=r(t)−y(t)e(t) = r(t) - y(t)e(t)=r(t)−y(t)。
- PID 控制器:生成初步控制信号。
- 重复控制器:构造周期性补偿信号。
- 被控对象:实际系统,输出 y(t)y(t)y(t)。
4. 重复控制器设计
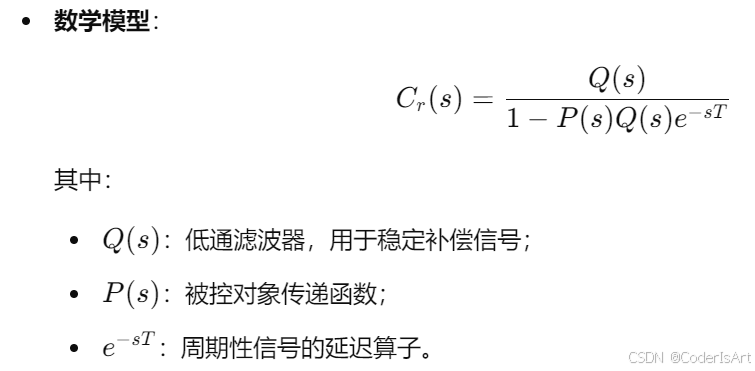
4.1 基本重复控制器
- 设计原则: 重复控制器基于周期 TTT 构造补偿信号,使系统在每个周期内修正误差。
6. C++ 实现代码
以下为离散化的基于重复控制补偿的 PID 控制算法实现。
#include <iostream>
#include <vector>
#include <cmath>
class PIDController {
public:
double Kp, Ki, Kd, Ts;
double integral, prevError;
PIDController(double kp, double ki, double kd, double ts)
: Kp(kp), Ki(ki), Kd(kd), Ts(ts), integral(0.0), prevError(0.0) {}
double compute(double error) {
integral += error * Ts;
double derivative = (error - prevError) / Ts;
prevError = error;
return Kp * error + Ki * integral + Kd * derivative;
}
};
class RepetitiveController {
public:
std::vector<double> errorHistory;
int periodSamples;
double Q; // 滤波器增益
RepetitiveController(int period, double q)
: periodSamples(period), Q(q) {
errorHistory.resize(periodSamples, 0.0);
}
double compute(double error, int step) {
int index = step % periodSamples;
double compensation = Q * errorHistory[index];
errorHistory[index] = error;
return compensation;
}
};
int main() {
double Ts = 0.01; // 采样周期
double T = 1.0; // 周期
int periodSamples = static_cast<int>(T / Ts);
PIDController pid(1.0, 0.5, 0.1, Ts);
RepetitiveController rc(periodSamples, 0.9);
double r = 1.0; // 参考输入
double y = 0.0; // 系统输出
double u = 0.0; // 控制输入
for (int step = 0; step < 1000; ++step) {
double e = r - y; // 误差计算
// PID 控制器计算
double u_pid = pid.compute(e);
// 重复控制器计算
double u_rc = rc.compute(e, step);
// 总控制信号
u = u_pid + u_rc;
// 模拟被控对象
y = 0.8 * y + 0.2 * u; // 简单的一阶系统模型
std::cout << "Step: " << step << ", Error: " << e
<< ", Control: " << u << ", Output: " << y << std::endl;
}
return 0;
}
7. 特点与优势
-
高精度控制:
- 重复控制器针对周期性误差进行精确补偿,显著提升稳态性能。
-
鲁棒性:
- PID 控制器处理快速动态误差,增强系统的鲁棒性。
-
易于实现:
- PID 和 RC 控制器结合,便于在嵌入式系统中实现。
-
广泛适用:
- 适用于伺服控制、电机控制、轨迹跟踪等周期性控制场景。
8. 应用场景
-
伺服控制:
- 用于高精度伺服系统的运动控制。
-
电机控制:
- 在电机转矩控制和位置控制中对周期性误差进行补偿。
-
轨迹跟踪:
- 在机器人控制中补偿周期性路径偏差。
-
精密加工:
- 用于补偿机械加工设备中的周期性误差,提高加工精度。
9. 总结
基于重复控制补偿的高精度 PID 控制,通过结合 PID 控制器和重复控制器的优点,实现了对周期性误差的精确补偿和快速响应。此方法在需要高精度、低误差的周期性系统控制中具有重要应用价值,同时提供了良好的鲁棒性和可实现性。

















 4942
4942

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









