







PX4固件版本为1.14.3
QGC地面站版本为4.4.3
飞控,使用微空科技MicoAir743飞控,建议买他家MicoAir743V2,有蓝牙数传
GPS罗盘,使用微空科技MG-902
需先设置好飞控方向,外置罗盘不用管,之后校准罗盘的时候会自行校准
建议阅读:
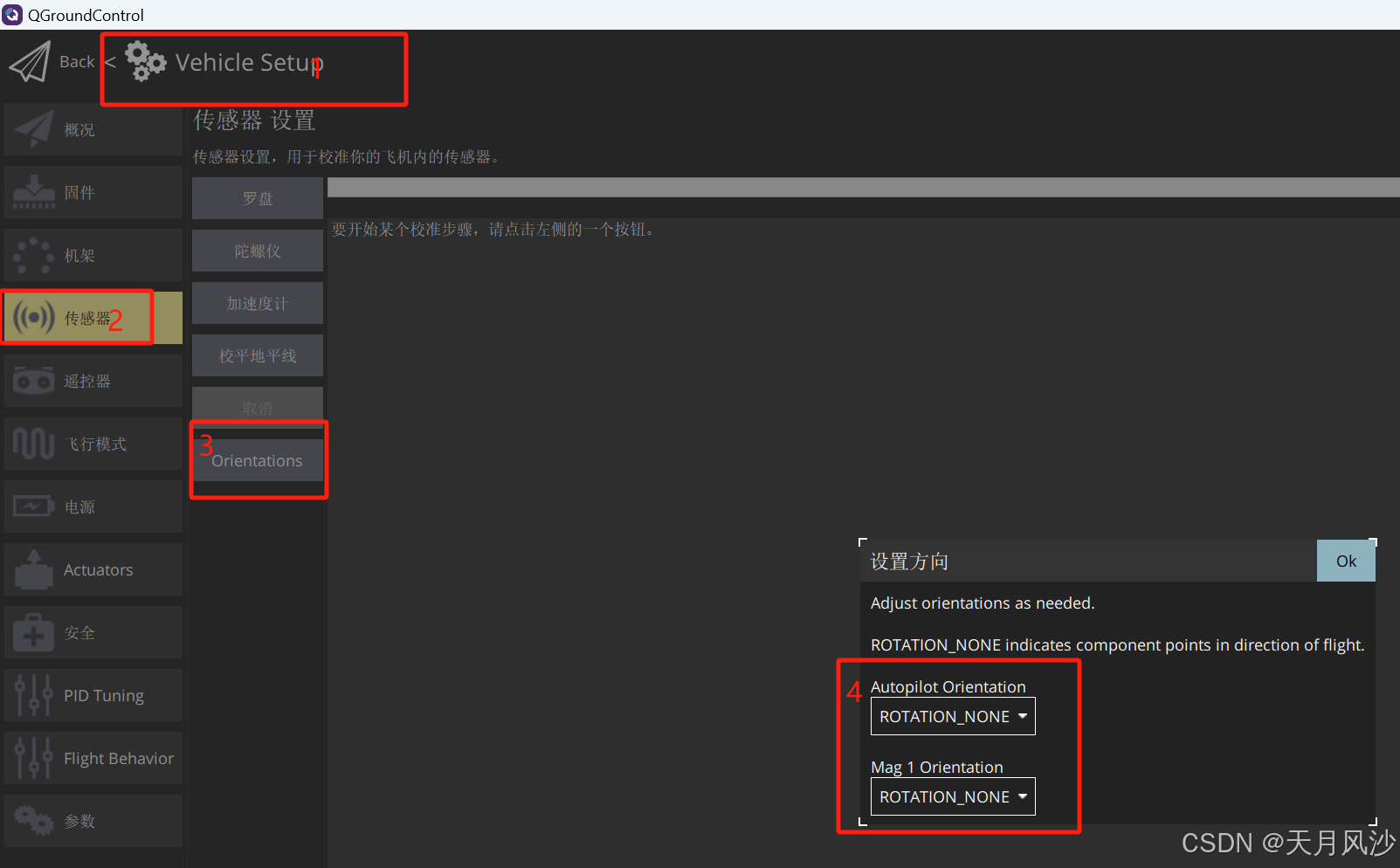
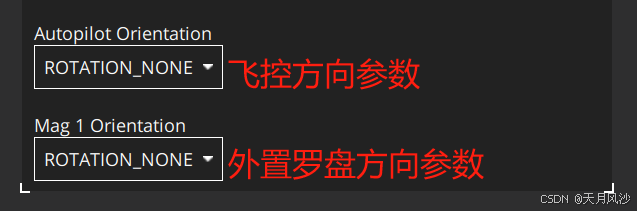
根据上图点击,进入设置界面,下图就是参数选项,仅供参考,微空科技的gps罗盘方向和飞控方向是不一样的
飞行控制器/传感器方向
默认的飞行器(如果具有外部罗盘)应该向上安装在机架上部,箭头朝向飞行器的前方。 如果板载或外部罗盘被安装在其他方向,您需要在固件中配置。
计算朝向
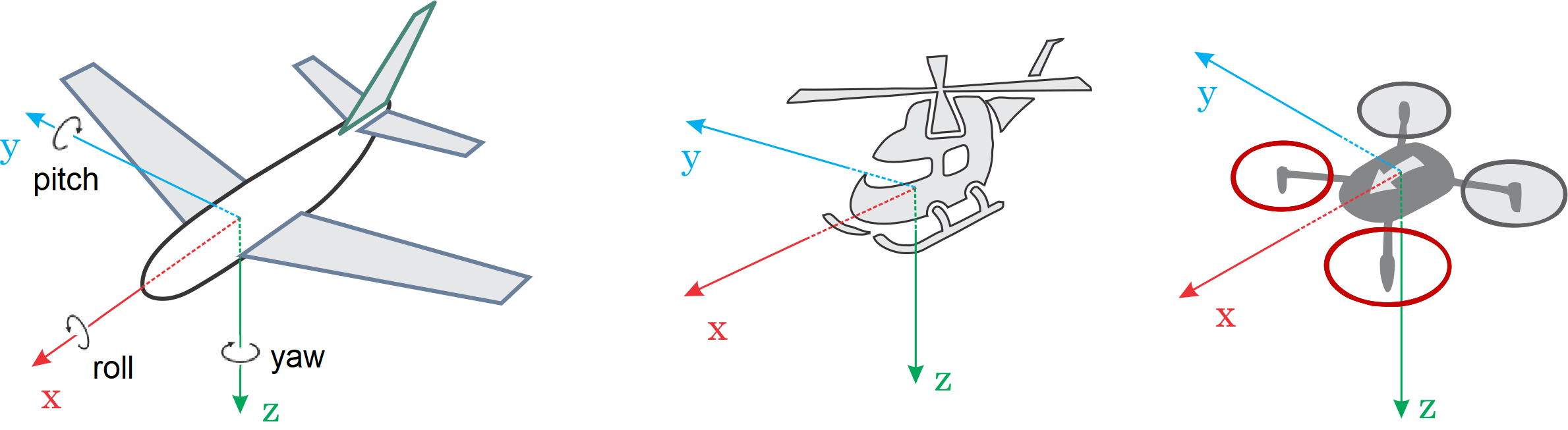
ROLL, PITCH and/or YAW offsets of the flight controller are calculated relative to the vehicle around the forward (x), right (y), down (z) axes.
飞行控制器的 ROLL、PITCH 和/或 YAW 偏移是相对于机体绕前进 (x)、右 (y)、下 (z) 轴计算的。
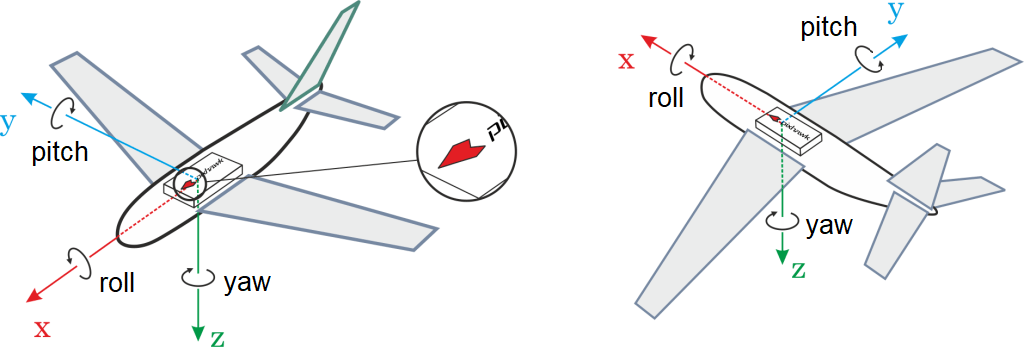
请一定要注意下左图箭头指的方向,角度是顺着箭头方向起始的
The axes to rotate around stay the same from one rotation step to the next one. So the frame to perform the rotation in stays fixed. This is also known as extrinsic rotation.
从一个旋转步骤到下一个旋转步骤,要旋转的轴保持不变。因此,执行旋转的帧保持固定。这也称为 extrinsic rotation。
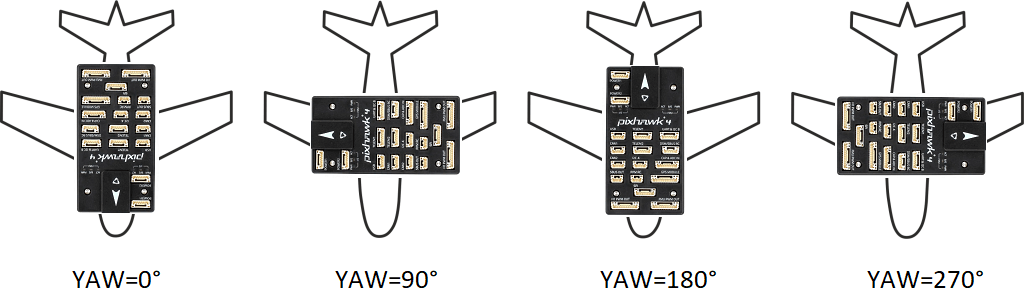
For example, the vehicles shown below have rotations around the z-axis (i.e. yaw only) corresponding to: ROTATION_NONE, ROTATION_YAW_90,ROTATION_YAW_180,ROTATION_YAW_270.
例如,下面显示的无人机绕 z 轴旋转(即仅偏航),对应于:ROTATION_NONE、ROTATION_YAW_90、ROTATION_YAW_180、ROTATION_YAW_270。
特殊角度设置
PX4 will automatically detect the compass orientation as part of compass calibration (by default) for any of the standard MAVLink orientations (upright and facing forward, or any multiple of 45° offset in any axis) .
PX4 将在指南针校准过程中(默认)自动检测任何标准 MAVLink 方向(直立和面向前方,或任何轴上 45° 偏移的任意倍数)
If a non-standard orientation has been used you will need to set the CAL_MAGx_ROLL, CAL_MAGx_PITCH, and CAL_MAGx_YAW parameters for each compass to the angles that were used.
如果使用了非标准方向,则需要将每个罗盘的CAL_MAGx_ROLL、CAL_MAGx_PITCH和CAL_MAGx_YAW参数设置为所使用的角度。
This will automatically set CAL_MAGn_ROT to "custom euler angle" and prevents automatic calibration for the selected compass (even if SENS_MAG_AUTOROT is set).
这会自动将CAL_MAGn_ROT设置为“自定义欧拉角”,并阻止对所选指南针进行自动校准(即使设置了SENS_MAG_AUTOROT)。

















 893
893

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









