







环境
windows 11
pixhawk 2.4.8
GPS M8N
Mission Planner 1.3.80
前提
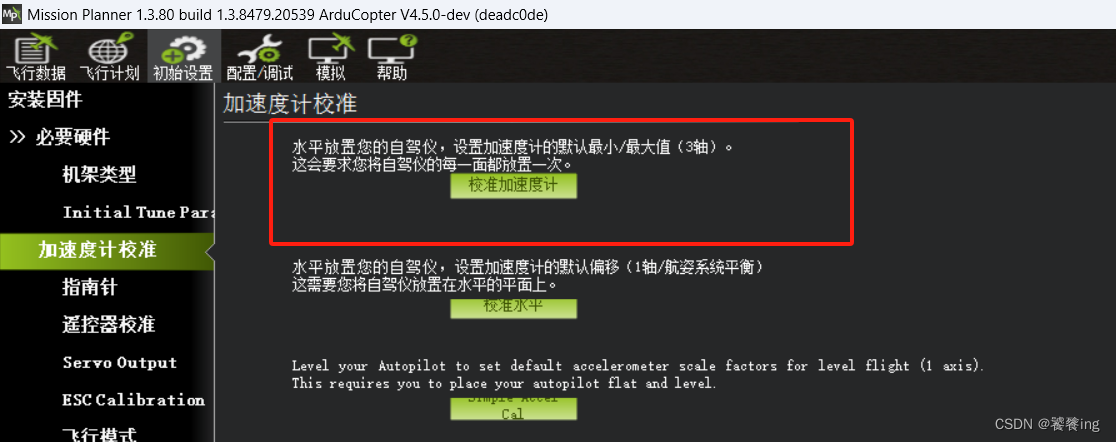
已经校准pixhawl自带的加速度计
根据提示,转动pixhawk,按空格键进行下一个步骤,成功后提示success
校准GPS罗盘
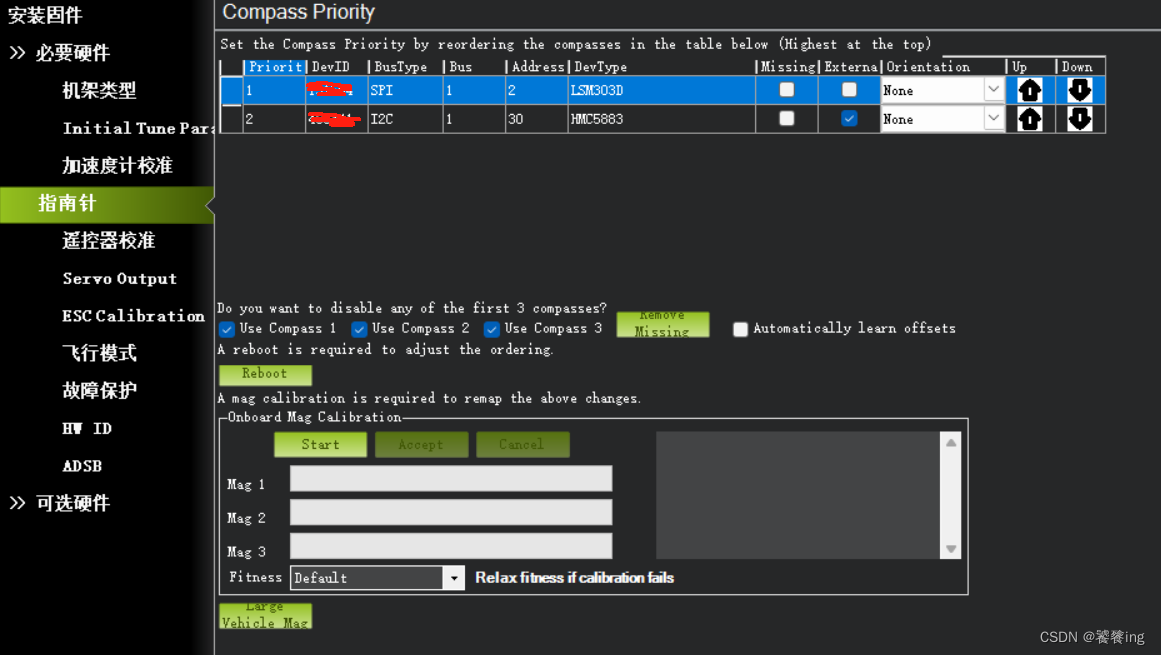
pixhawk飞控支持使用双罗盘(也就是内置罗盘和外置罗盘同时使用)
内置罗盘容易受干扰,外置罗盘比较稳定,所以最好使用GPS罗盘
-
打开指南针,先设置优先级,把I2C的行设置到前面
-
把pixhawk的朝向和GPS罗盘的朝向放置成一致的(箭头朝向一样,可以把GPS罗盘叠加在pixhawk上,单手拿捏,方便转动),点击“start”按键,会听到1s一次的滴滴声,然后一起转动,随便转,各种转
-
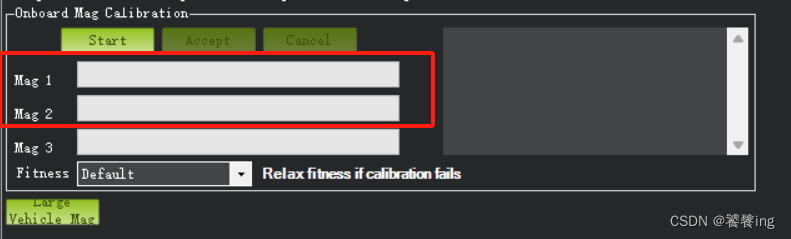
下方的Msg 1和2会显示绿色的进度条,最右边会显示百分比
-
当两条进度条满后,会有弹窗提示reboot,确定,等待连接断开,重新插拔USB线,再次连接,会听到清脆的蜂鸣声,校准完毕

















 3761
3761

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









