







版权声明:本文为博主[原创]文章,未经博主允许可以转载,注明博客出处:[http://blog.csdn.net/FreeApe]
1 说明
在Pixhawk的固件中,已经实现了串口和i2c的底层驱动,并不需要自己去写驱动。通过串口的方式添加超声波的缺点是串口不够,不能添加多个超声波模块,此时需要用到i2c的方式去添加了。在Pixhawk固件中,i2c的方式去添加超声波模块传感器已经实现了一个mb12xx超声波产品的驱动,可以直接使用,模块位置为:../src/drivers/mb12xx。当然还可以通过PWM的方式去添加超声波模块(模块支持此功能);
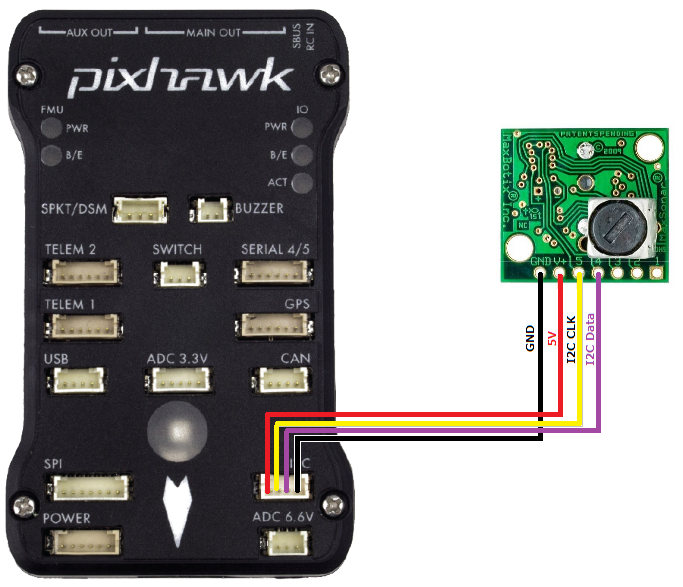
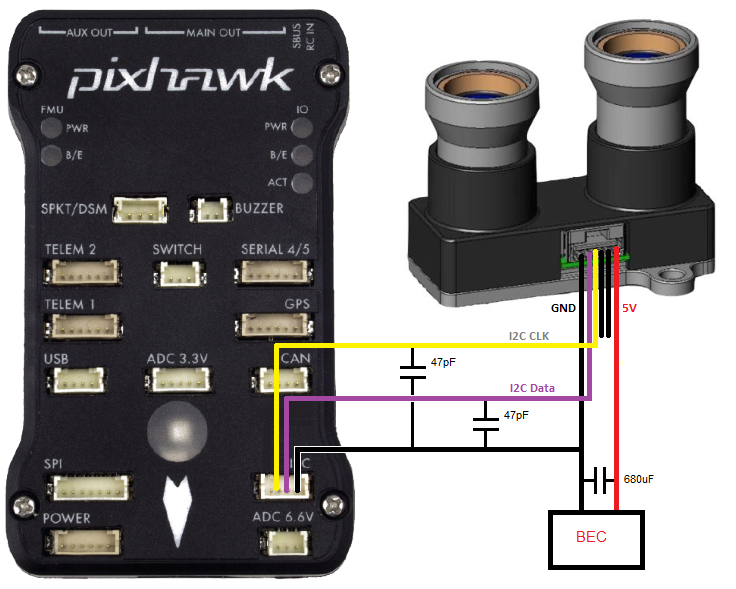
2 模块连接说明
超声波mb12xx

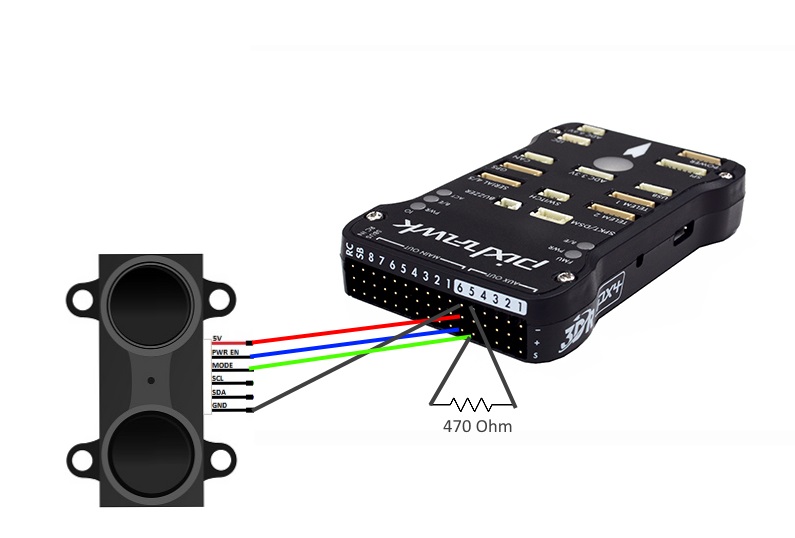
激光雷达(支持通过PWM方式)
3 相关资料
https://item.taobao.com/item.htm?spm=a230r.1.14.1.q6h2kN&id=40143003917&ns=1&abbucket=6#detail
http://www.maxbotix.com/documents/I2CXL-MaxSonar-EZ_Datasheet.pdf















 3367
3367

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









