







 本文探讨了ROS中Service和Topic两种通信方式的实验速度、理论速度和实现机制。实验表明,通过Service通信的延迟大约是Topic的4倍,这与Service的同步机制有关。Service适合执行低频复杂任务,而Topic适用于高频通信。在设计系统时,应综合考虑各种因素以选择合适的通信方式。
本文探讨了ROS中Service和Topic两种通信方式的实验速度、理论速度和实现机制。实验表明,通过Service通信的延迟大约是Topic的4倍,这与Service的同步机制有关。Service适合执行低频复杂任务,而Topic适用于高频通信。在设计系统时,应综合考虑各种因素以选择合适的通信方式。
这学期当TA了,改作业的时候service和topic这两个一直比较模糊的问题又跳了出来,觉得这个坑还是得填上,那就留一篇博客吧。
实验速度
1. via topic
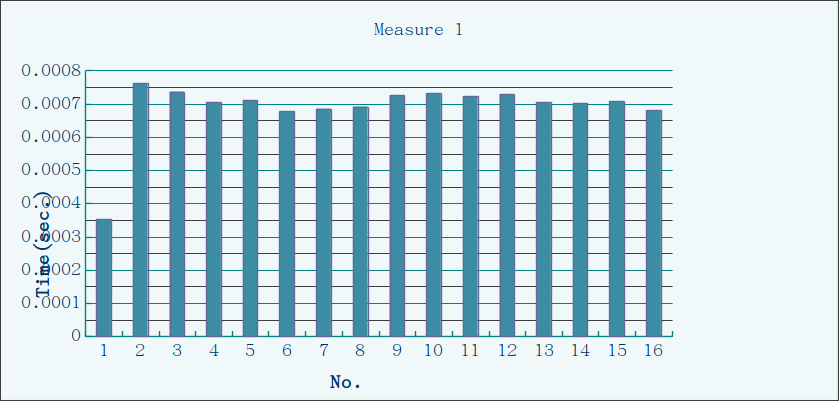
上图是以前ROS课上做的一个实验,内容是测试一个publisher和一个subscriber之间通讯所用的时间。两个node都很简单,publisher发送一个字符串,字符串带有标号;subscriber回显该字符串,字符串长度不超过20个char。
怎么去标定发送时间是接收时间呢?目前使用的方法就是在publisher发送前使用ROS_INFO输出一个消息,消息会带有ROS的时间戳;subscriber的callback函数里边也使用ROS_INFO输出一个带时间戳的消息。虽然说这种方法并不是非常精准,但目前也没有想到更好的办法了,哪怕是使用header里边的time stamp也有一个获得当前时间和赋值的过程,难以百分百精确,所以目前只能这样粗略测量。
根据实验数据可以发现在同一台机器上,两个node通过topic通讯,大致产生0.7ms的延迟。(本人机子i5-3210M/4G)
2. via service
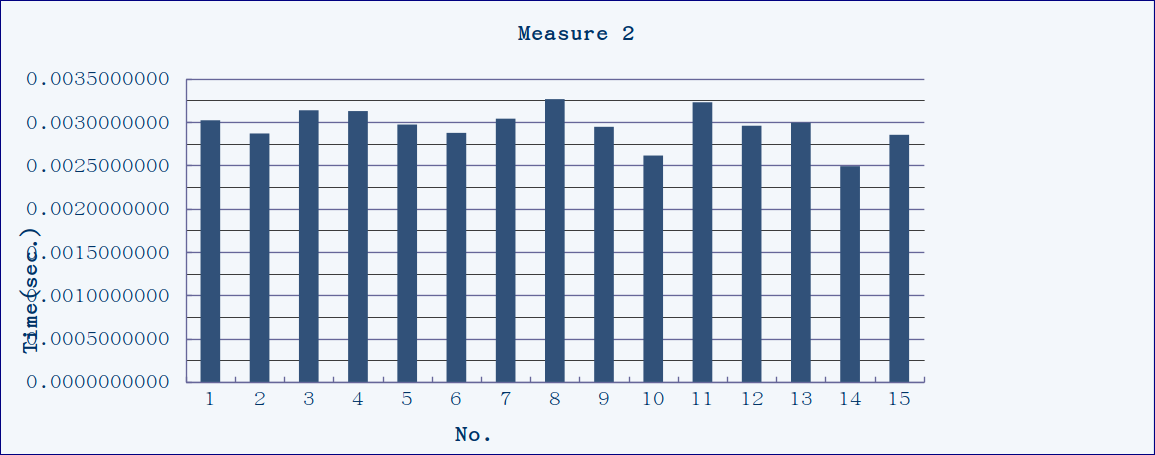
这张图是今天自己做的测试,可以看到平均时间大约在3ms左右。
测量的方法也是跟上面的类似。Client在call之前先输出一个带时间戳的消息,server在接收到请求执行操作前也会输出一个带时间戳的消息。这次client与server之间传递的消息更短,是两个int。
从上图我们不
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 272
272

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









