








说明:由于安装的ROS版本是hydro,故选择安装版本为Gazebo 1.9。
Gazebo 1.9的不同:SDF(模拟描述格式)和URDF(通用机器人描述格式)的解析器(parsers)已经被移动到一个名为SDFormat的隔离包内。
对于是ROS的使用者:
1.最好选择从http://gazebosim.org来安装Gazebo,在ROS官网上关于Gazebo的安装文档已经过时,不建议;
2.对于ROS Hydro版本,使用的是独立的Gazebo版本。
安装Gazebo,有2种方法,如果仅仅是想在ubuntu上独立的使用Gazebo,那么就选择从ubuntu Debians操作系统安装(本文采用这种方法),还有一种方法是从源程序编译安装(不推荐)。
Ubuntu Debians
1.配置你的Ubuntu库文件,允许“restricted”,“universe”及“multiverse”打开。对于Ubuntu9.04以上版本默认已经打开,如果不是,打开ubuntu software center 点击edit | software sources,出现如下窗口:
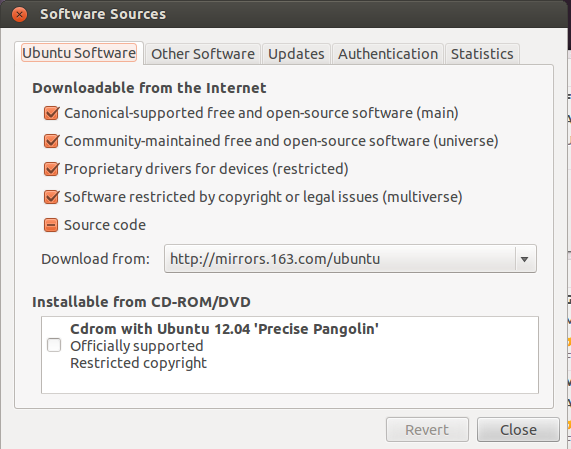
正常来说,所有选项都被选上了的。
2.设置电脑能安装来自packages.osrfoundation.org的软件。
Ubuntu Linux 12.04 (precise)
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu precise main" > /etc/apt/sources.list.d/gazebo-latest.list'
Ubuntu Linux 12.10 (quantal)
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu quantal main" > /etc/apt/sources.list.d/gazebo-latest.list'
Ubuntu Linux 13.04 (raring)
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu raring main" > /etc/apt/sources.list.d/gazebo-latest.list'
Ubuntu Linux 13.10 (saucy)
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu saucy main" > /etc/apt/sources.list.d/gazebo-latest.list'
3.检索、安装Gazebo库文件的关键部分
wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
4.更新apt-get,安装Gazebo
sudo apt-get update
sudo apt-get install gazebo
5.检验安装
gzserver
注意:Gazebo 1.9不再需要为设置.bashrc而总是source setup.bash文件
第一次运行需要下载一些model,可能需要一些时间,当看到“Publicized address:...”时表示执行成功。

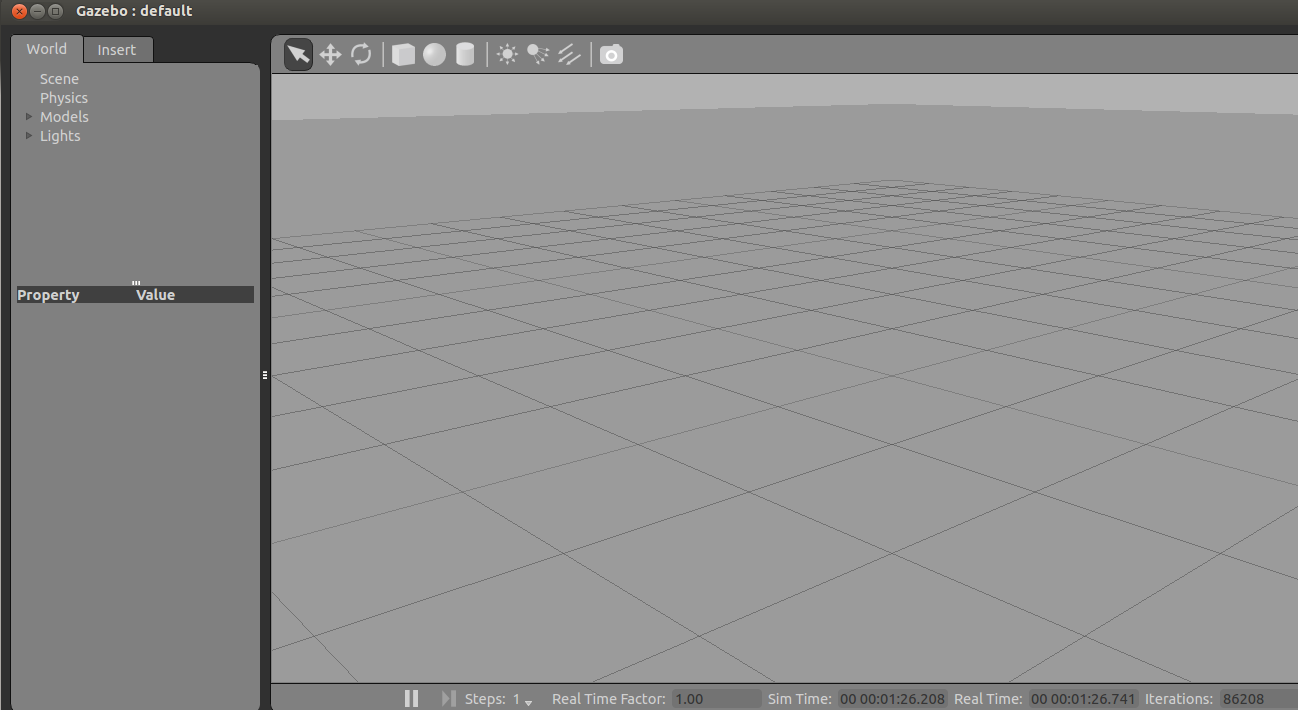
6.运行gazebo client
gzclient
出现如下界面,表示安装成功。
本文靠自己的理解,翻译而来,如有错误之处望不吝指教!!!















 1734
1734

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









