






一、 运动控制
机械手任务:在工作空间执行特定的运动和接触力。
运动控制目的:确定由关节执行元件所形成的广义力,保证实现任务的同时,满足给定的瞬态和稳态要求。
两种控制方案:
1、 关节空间控制
2、 操作空间控制
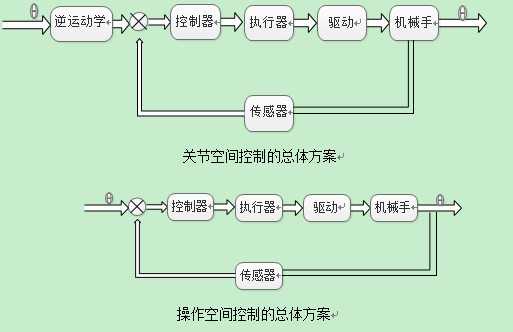
关节空间的控制:先通过逆运动学解算出各个关节的运动,然后用真实运动来跟踪参考输入
操作空间的控制:采用真题求法,运算更复杂,而且末端操作器的位姿难以直接测量得到。
二、 力控制
前提:机械手与外部环境有交互力。在交互作用中,环境会对末端执行器的路径产生约束。
背景:在任务准确规划的前提下,才能通过运动控制实现与环境的交互任务。这需要机械手(运动学和动力学)和环境(几何特征、机械特性)的准确建模。对环境建模十分困难。
在力控制中,如果关节没有柔性,可能破坏机械臂执行元件或与机械手接触的环境。
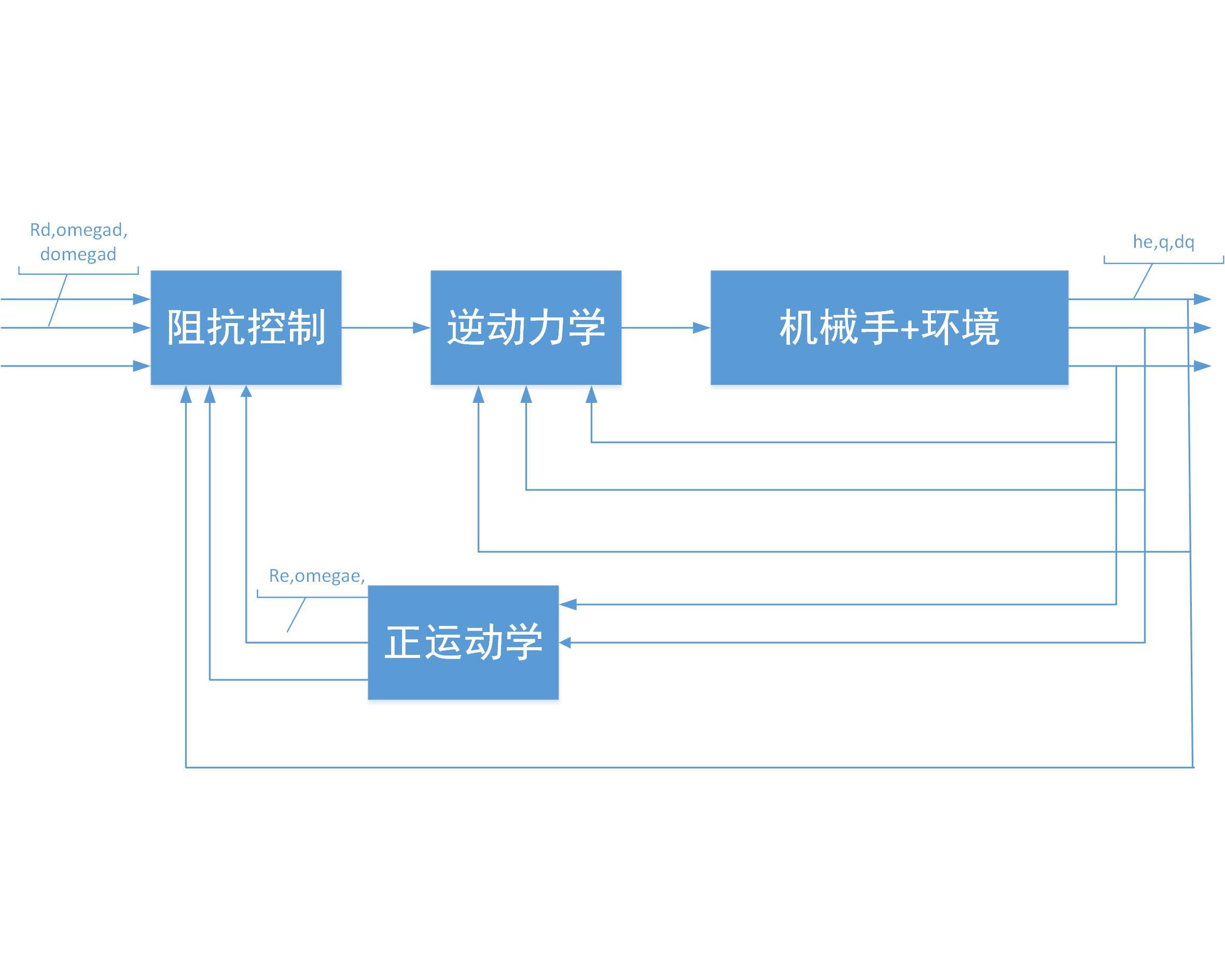
阻抗控制:建立一个期望的机器人位置和接触力的动态响应关系。将外界环境系统视为对机器人系统的一种“干扰”,并给机器人在受外界力而偏离既定运动时具有阻抗形式的扰动响应。通过改变上述阻抗,就可以调节机器人与外界的动态作用。















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









