








PD 控制是常规的控制方法,设计简单,用李雅普诺夫方法证明简单,不需要系统的模型,是无模型控制中的基本方法。
令
[q~Tq˙T]
为系统的状态向量,
其中:
q~=qd−q
表示期望位姿和实际位姿之间的误差。选择一下正定二次型作为李雅普诺夫函数:
V(q˙,q~)=12q˙TB(q)q˙+12q~TKpq~>0,∀q˙,q~≠0
其中, Kp 为 n∗n 的正定矩阵。(第一项表示系统的动能,第二项表示系统的势能)
对时间求导:
V˙=q¨TB(q)q¨+12q˙TB˙(q)q˙−q˙tKpq~
根据动力学公式:
B(q)q¨+C(q,q˙)q˙+Fq˙+g(q)=τ
得:
V˙=q˙T(B˙(q)−2C(q,q˙)q˙)q˙−q˙TFq˙−q˙t(τ−g(q)−Kpq~)=−q˙TFq˙−q˙t(τ−g(q)−Kpq~)
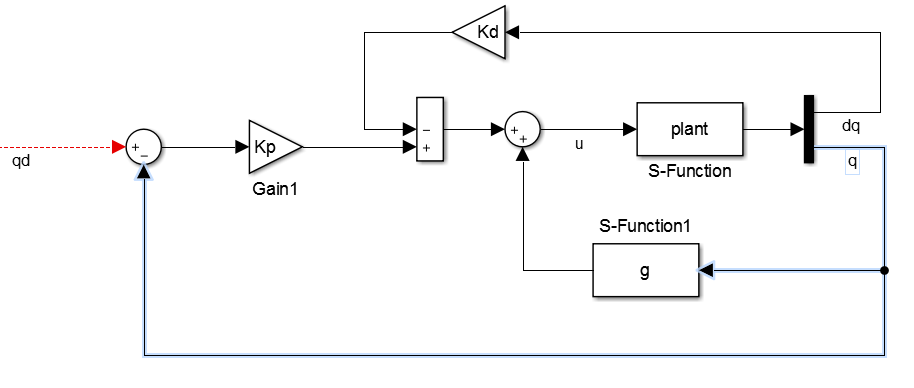
第一项负定, τ=g(q)+Kpq~−Kdq˙ 时,
V˙=−q˙T(F+Kd)q˙
只要 F+Kd 正定,即可得:
V˙<0,∀q≠0
根据李雅普诺夫方法,可得系统是稳定的。
基于重力补偿的 PD 控制的控制框图如下:















 1142
1142











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









