









 本文介绍了使用ROS进行机器人编程的方法,并提供了具体的示例,包括如何启动显示界面、设置模型参数及运行gazebo仿真等。此外,还展示了如何通过键盘控制机器人移动。
本文介绍了使用ROS进行机器人编程的方法,并提供了具体的示例,包括如何启动显示界面、设置模型参数及运行gazebo仿真等。此外,还展示了如何通过键盘控制机器人移动。
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865
Learning ROS forRobotics Programming Second Edition学习笔记(八)indigo rviz gazebo
indigo PCL例子以及xtionpro live pcl
--$ roslaunchrobot1_description display.launch model:="`rospack findrobot1_description`/urdf/robot1.urdf"
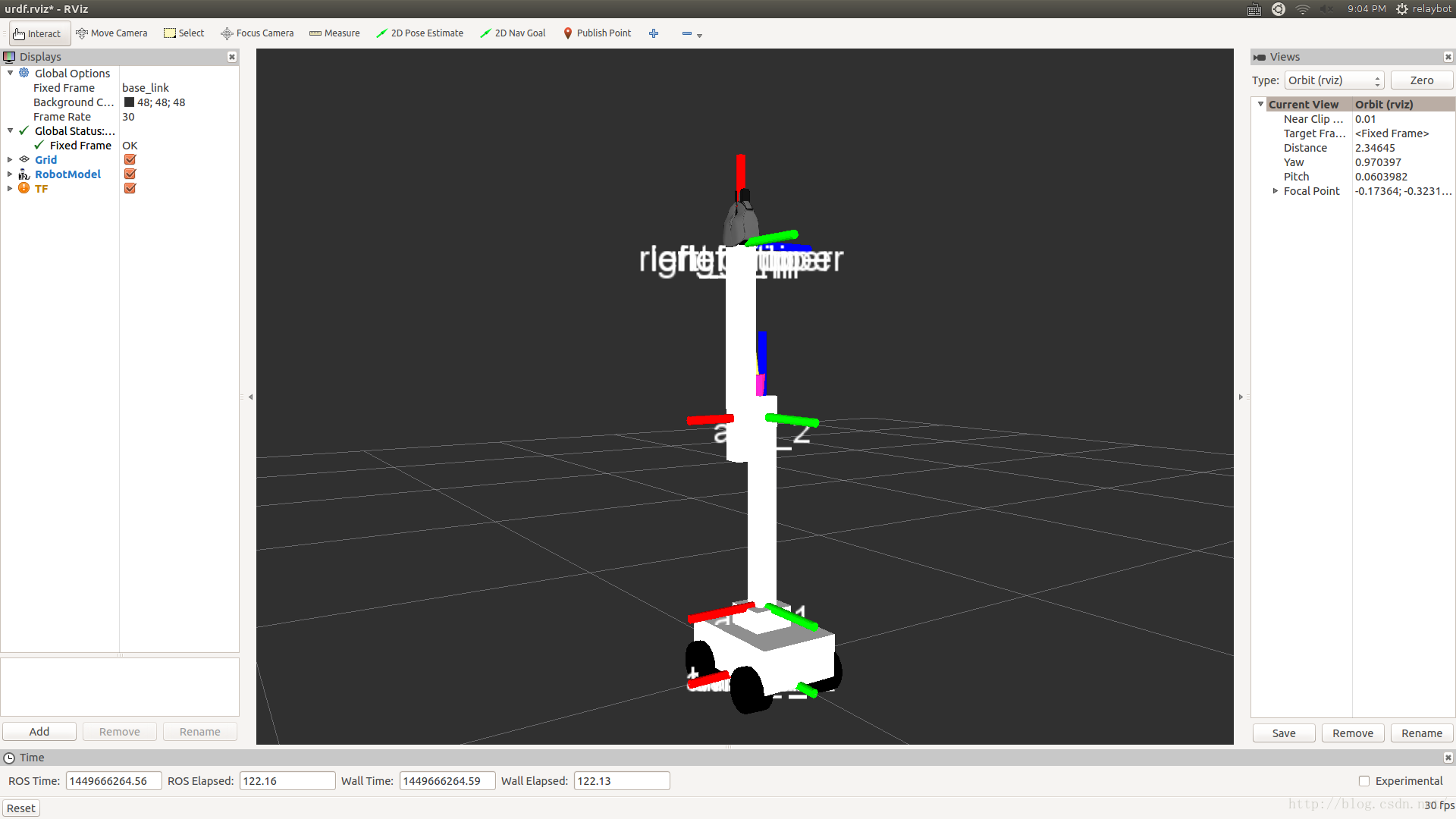
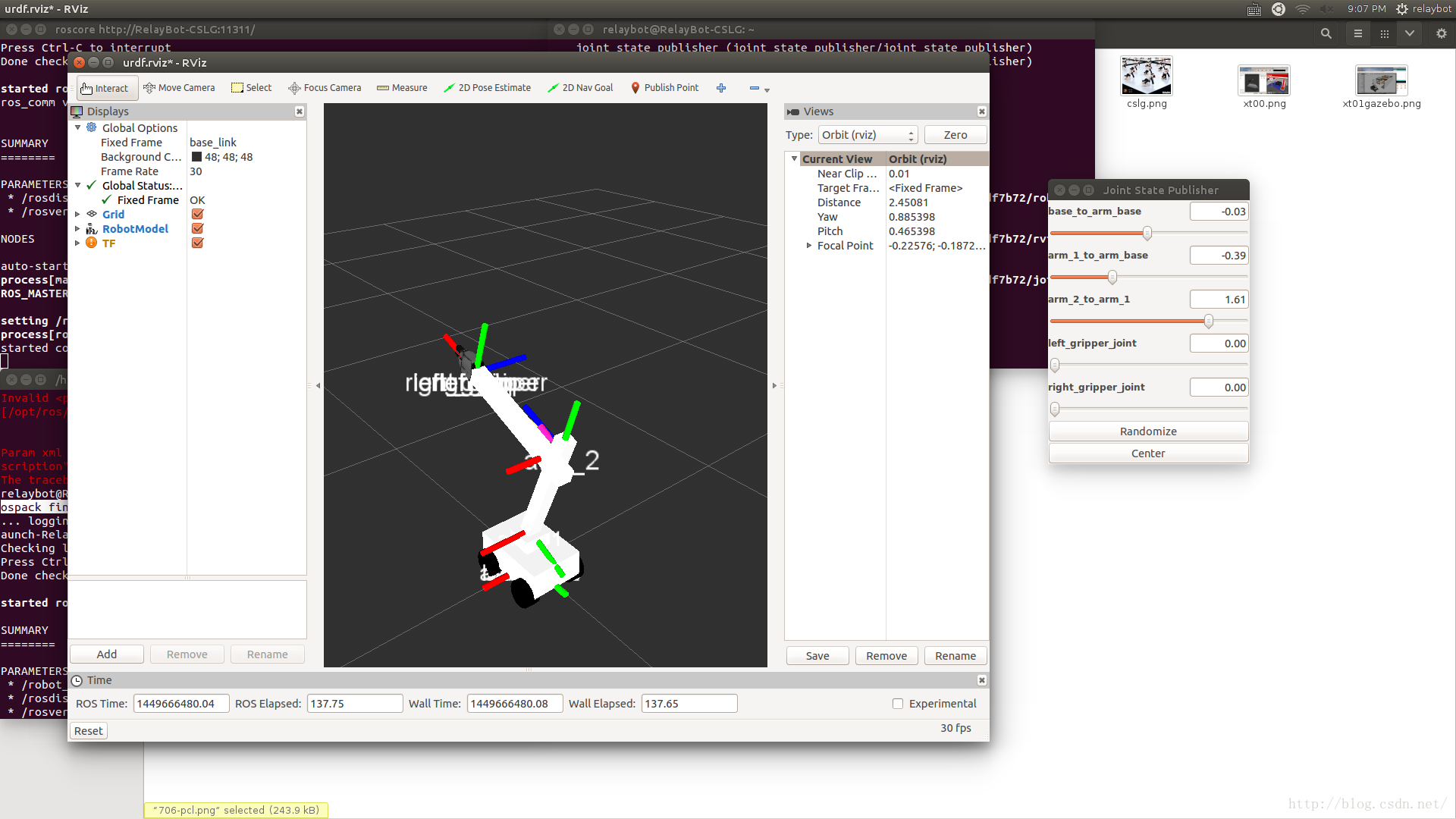
--$ roslaunchrobot1_description display.launch model:="`rospack findrobot1_description`/urdf/robot1.urdf" gui:=true
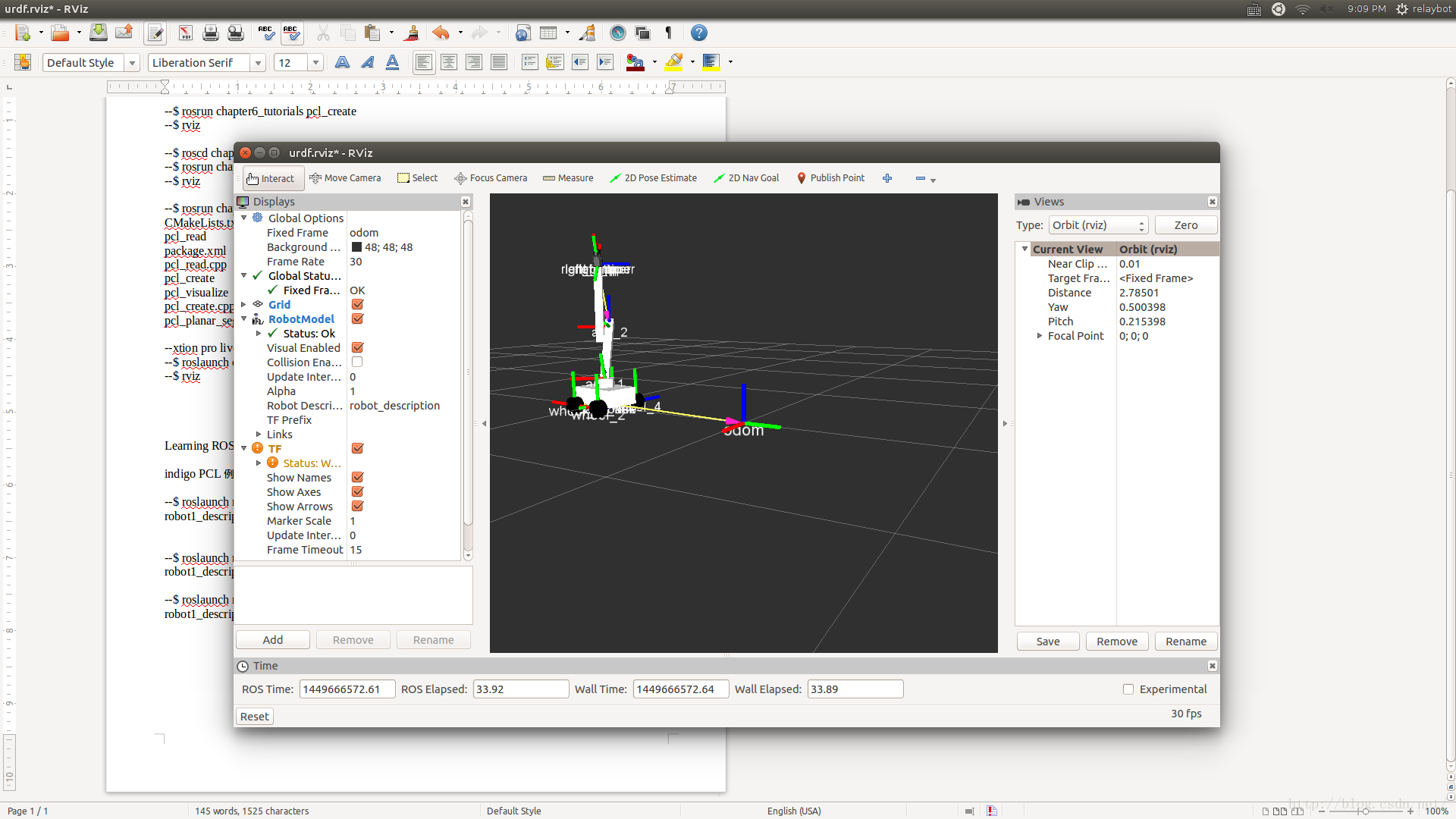
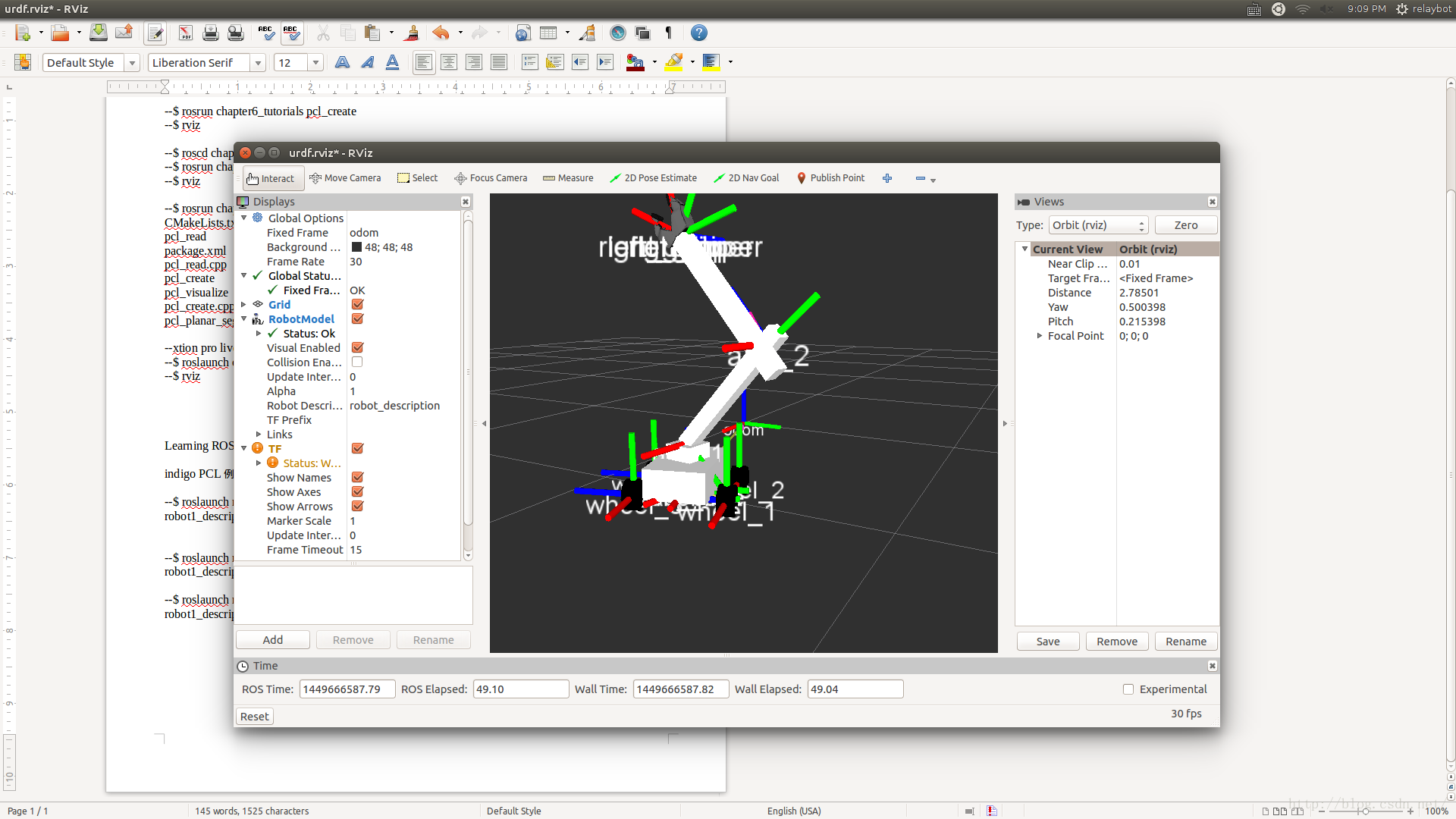
--$ roslaunchrobot1_description state_xacro.launch model:="`rospack findrobot1_description`/urdf/robot1.xacro"
--$ roslaunchrobot1_description display.launch model:="`rospack findrobot1_description`/urdf/dae.urdf"
--$ roslaunchrobot1_gazebo gazebo_wg.launch
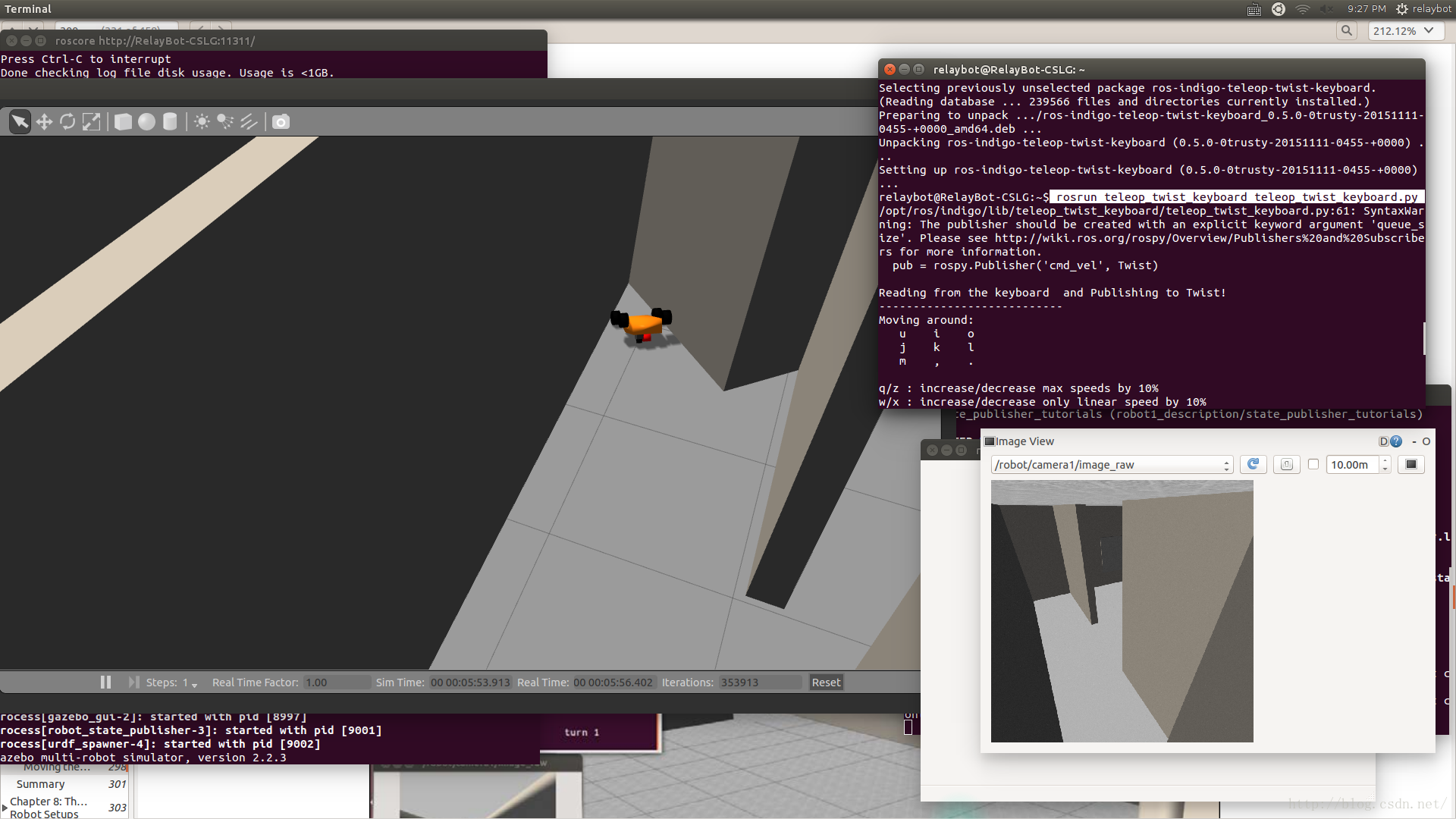
--$ rosrunteleop_twist_keyboard teleop_twist_keyboard.py




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











