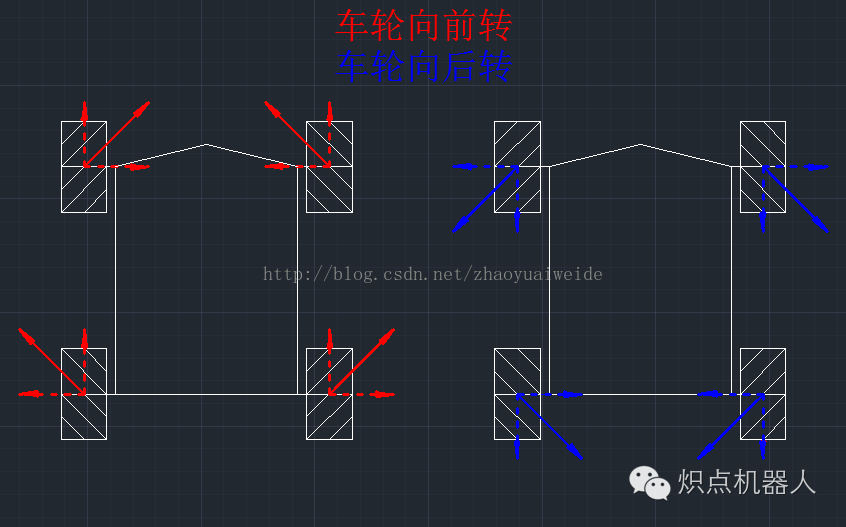
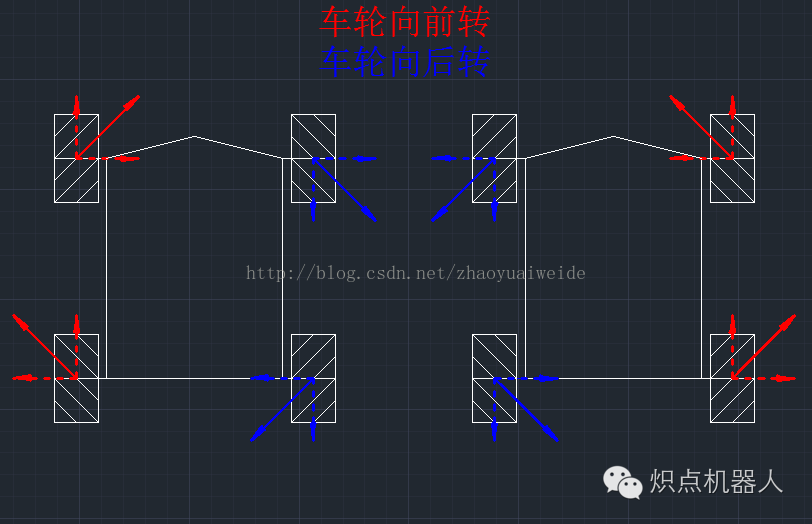
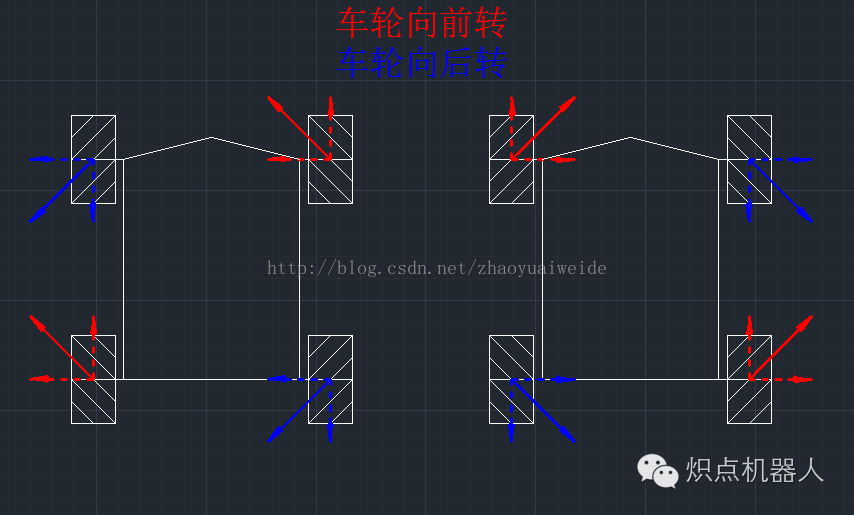
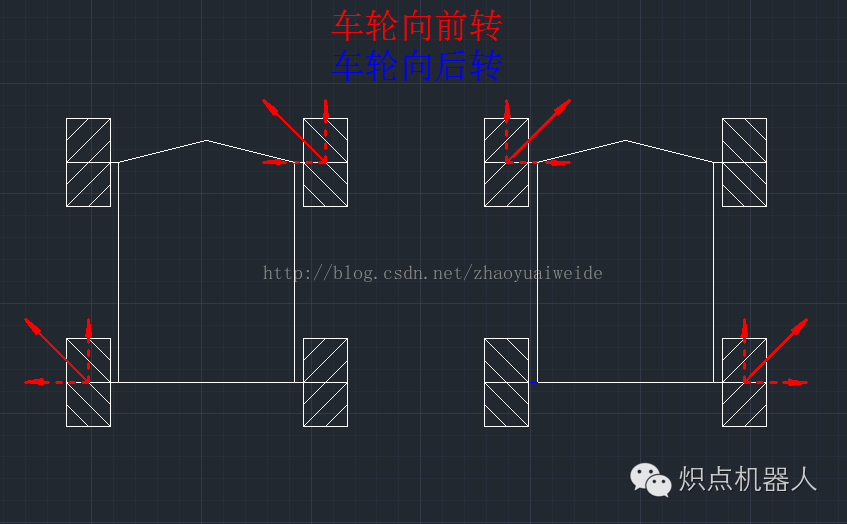
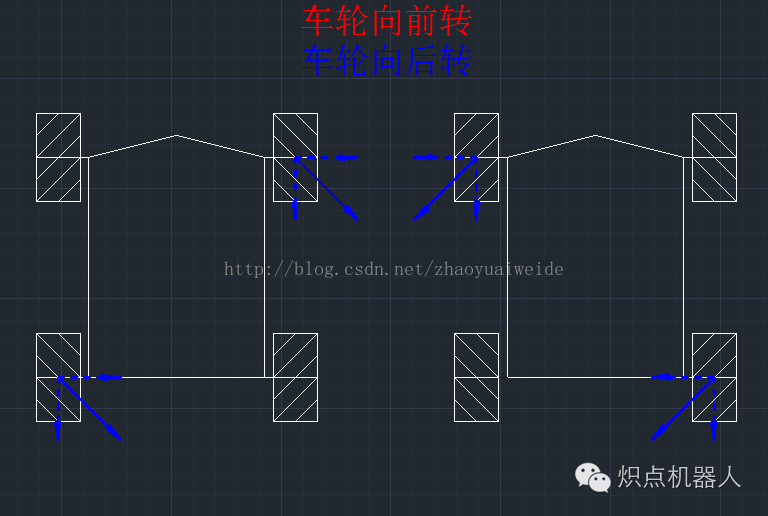
麦克纳姆轮是一种全向移动装置,常用于机器人和小车等设备中。它由四个轮子组成,每个轮子都有45度角倾斜。通过控制每个轮子的速度和方向,可以实现机器人的全向移动。
下面是一个使用Arduino控制麦克纳姆轮的示例代码:
```C++
//定义引脚
int motor1Pin1 = 2;
int motor1Pin2 = 3;
int motor2Pin1 = 4;
int motor2Pin2 = 5;
int motor3Pin1 = 6;
int motor3Pin2 = 7;
int motor4Pin1 = 8;
int motor4Pin2 = 9;
void setup() {
//设置引脚为输出模式
pinMode(motor1Pin1, OUTPUT);
pinMode(motor1Pin2, OUTPUT);
pinMode(motor2Pin1, OUTPUT);
pinMode(motor2Pin2, OUTPUT);
pinMode(motor3Pin1, OUTPUT);
pinMode(motor3Pin2, OUTPUT);
pinMode(motor4Pin1, OUTPUT);
pinMode(motor4Pin2, OUTPUT);
}
void loop() {
//控制麦克纳姆轮的运动方向和速度
move(255, 255, 255, 255); //向前移动
delay(2000); //延时2秒
move(-255, -255, -255, -255); //向后移动
delay(2000); //延时2秒
move(255, -255, 255, -255); //向左移动
delay(2000); //延时2秒
move(-255, 255, -255, 255); //向右移动
delay(2000); //延时2秒
}
//控制麦克纳姆轮的函数
void move(int motor1Speed, int motor2Speed, int motor3Speed, int motor4Speed) {
//控制第一个轮子
if (motor1Speed > 0) {
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
analogWrite(motor1Speed, motor1Speed);
} else if (motor1Speed < 0) {
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
analogWrite(motor1Speed, -motor1Speed);
} else {
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, LOW);
analogWrite(motor1Speed, 0);
}
//控制第二个轮子
if (motor2Speed > 0) {
digitalWrite(motor2Pin1, LOW);
digitalWrite(motor2Pin2, HIGH);
analogWrite(motor2Speed, motor2Speed);
} else if (motor2Speed < 0) {
digitalWrite(motor2Pin1, HIGH);
digitalWrite(motor2Pin2, LOW);
analogWrite(motor2Speed, -motor2Speed);
} else {
digitalWrite(motor2Pin1, LOW);
digitalWrite(motor2Pin2, LOW);
analogWrite(motor2Speed, 0);
}
//控制第三个轮子
if (motor3Speed > 0) {
digitalWrite(motor3Pin1, HIGH);
digitalWrite(motor3Pin2, LOW);
analogWrite(motor3Speed, motor3Speed);
} else if (motor3Speed < 0) {
digitalWrite(motor3Pin1, LOW);
digitalWrite(motor3Pin2, HIGH);
analogWrite(motor3Speed, -motor3Speed);
} else {
digitalWrite(motor3Pin1, LOW);
digitalWrite(motor3Pin2, LOW);
analogWrite(motor3Speed, 0);
}
//控制第四个轮子
if (motor4Speed > 0) {
digitalWrite(motor4Pin1, LOW);
digitalWrite(motor4Pin2, HIGH);
analogWrite(motor4Speed, motor4Speed);
} else if (motor4Speed < 0) {
digitalWrite(motor4Pin1, HIGH);
digitalWrite(motor4Pin2, LOW);
analogWrite(motor4Speed, -motor4Speed);
} else {
digitalWrite(motor4Pin1, LOW);
digitalWrite(motor4Pin2, LOW);
analogWrite(motor4Speed, 0);
}
}
```
这段代码可以实现麦克纳姆轮的向前、向后、向左、向右移动,并且可以控制移动的速度。需要注意的是,这段代码中的引脚定义和控制逻辑可能需要根据不同的硬件平台进行修改。









 938
938











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言























