






飞控:即为导航飞控系统,也叫自驾仪
物体运动的三个轴(多旋翼)
俯视多旋翼时:
与中心纵向的轴叫做纵轴(x轴)
与中心横向的轴叫做横轴(y轴)
平时多旋翼时:
与多旋翼垂直的轴叫立轴(z轴)
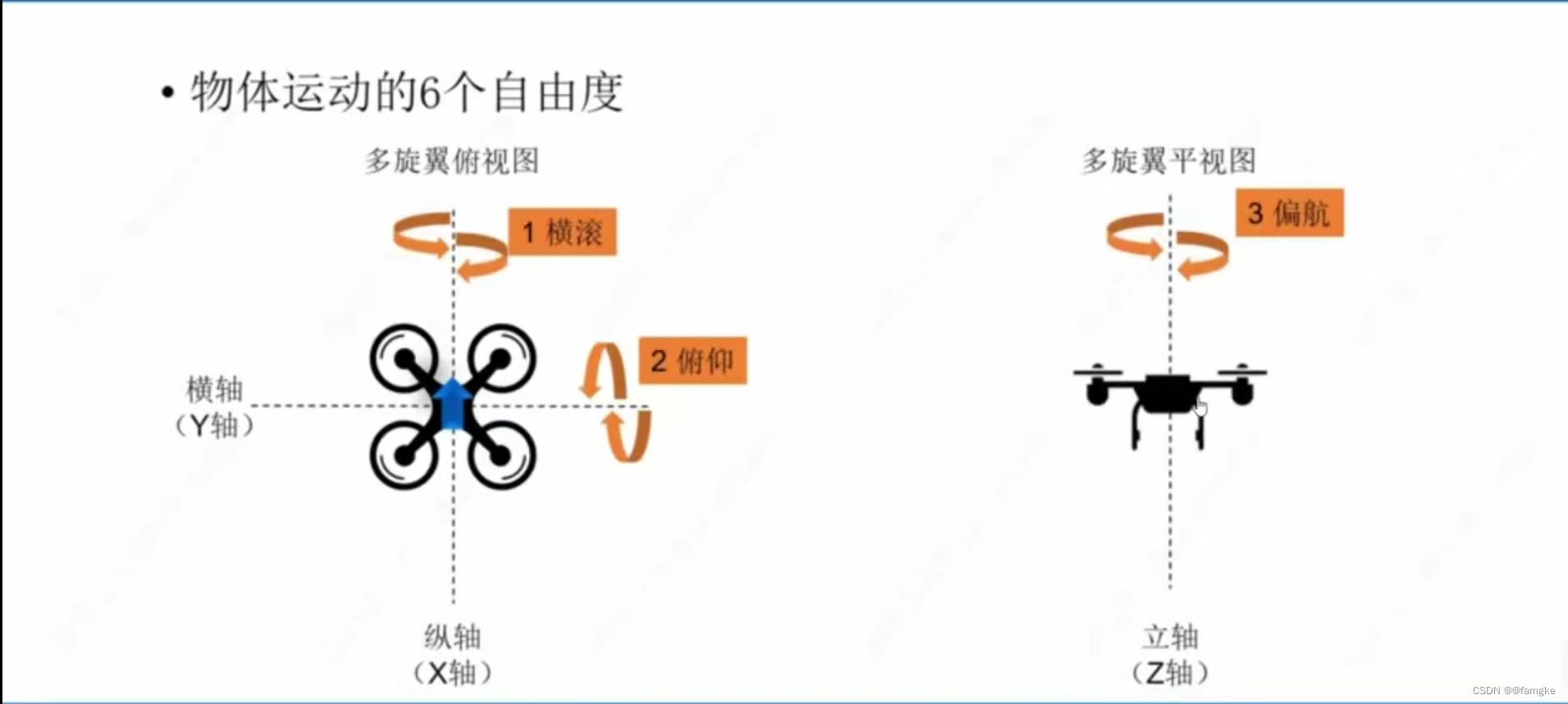
物体运动的六个自由度:
1.以纵轴为中心线的横滚运动
横滚角:即为在横滚运动中立轴与地心引力的夹角,顺时针为增加逆时针为减少
2.以横轴为中心线的俯仰运动
俯仰角:即为水平方向与纵轴的夹角,低头为减少抬头为增加
3.以立轴为为中心线的偏航运动
偏航角:即为在偏航运动中纵轴与地轴的夹角,顺时针为增加逆时针为减少
4.沿纵轴的前后运动
5.沿横轴的左右运动
6.沿立轴的上下运动

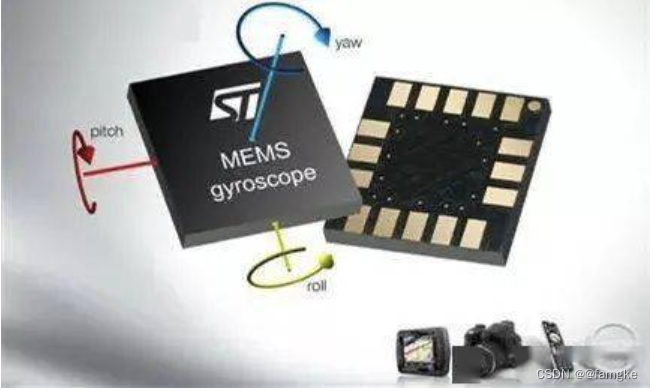
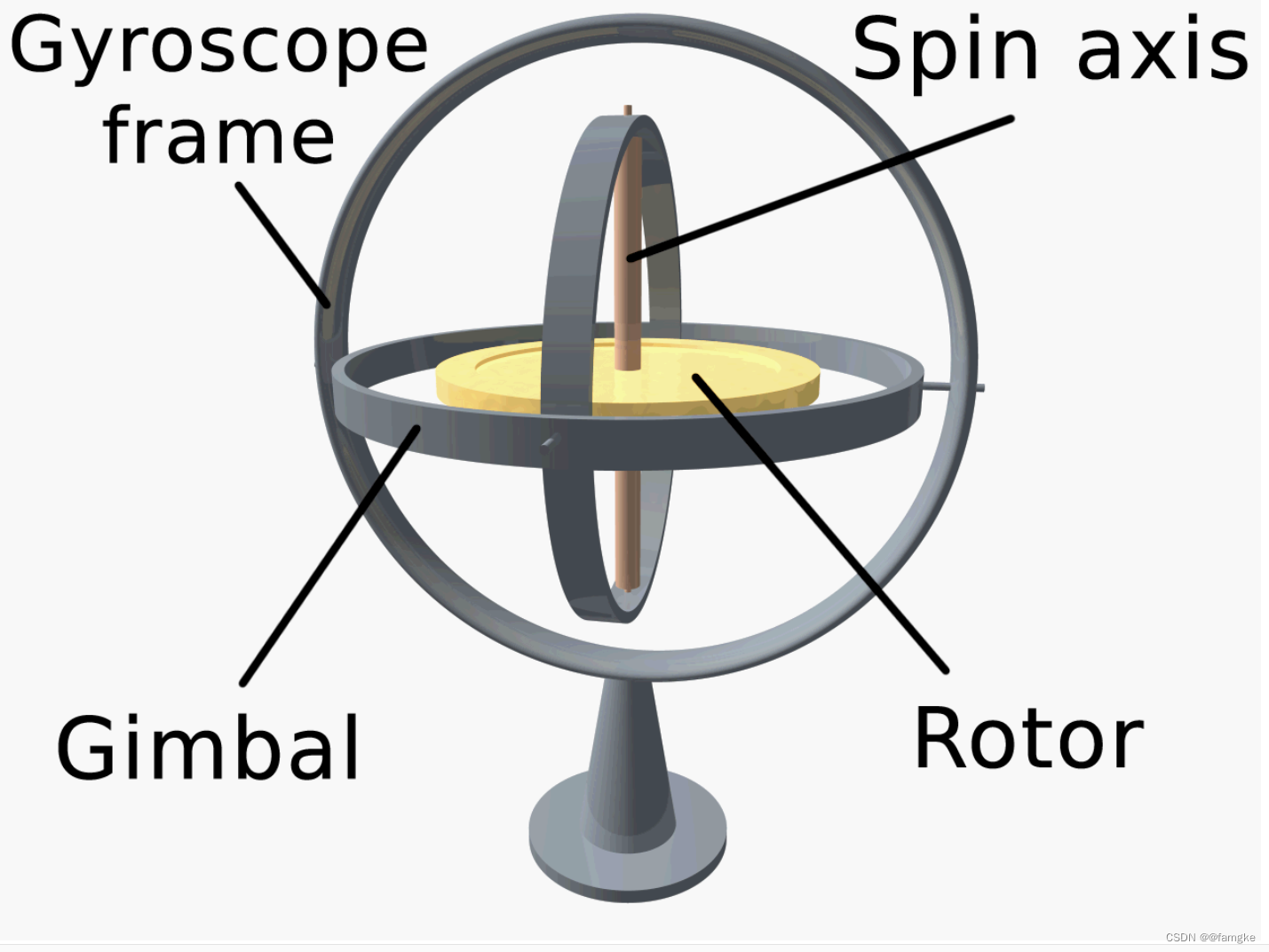
飞控如何稳定姿态
通过陀螺仪进行稳定姿态,陀螺仪的作用是通过测量三维坐标系内陀螺转子的垂直轴与设备之间的夹角,并且计算角速度,通过夹角和角速度来判别物体在三维空间的运动状态
如何导航
通过安装设备(如:GPS)再通过飞控的计算来进行导航,还可以通过添加气压计来判断自己的高度,通过磁力计判断自己的方向

















 1571
1571

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









