







1

![]()

2
3
4



5

6
7
8

9
10
11重要
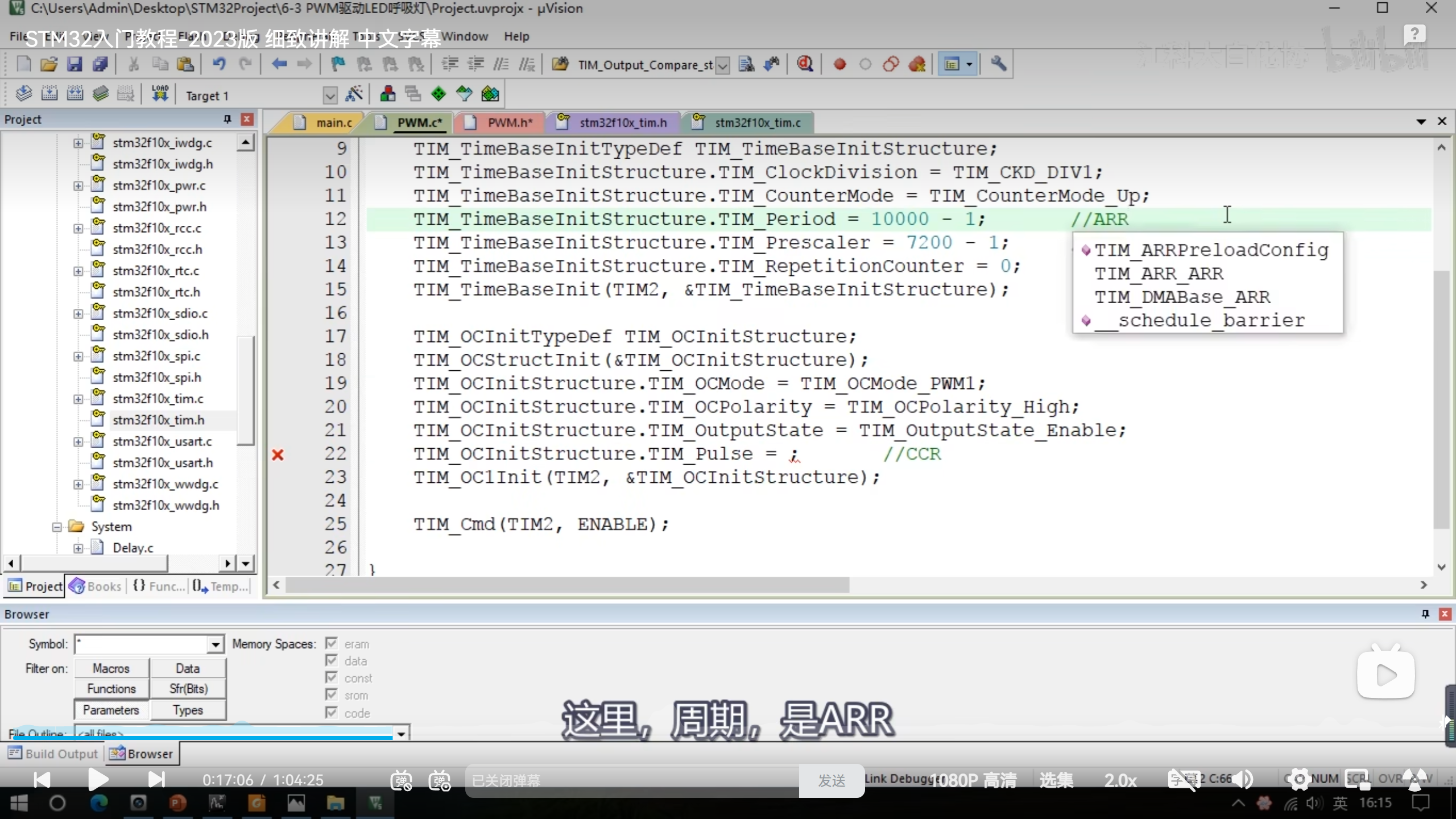
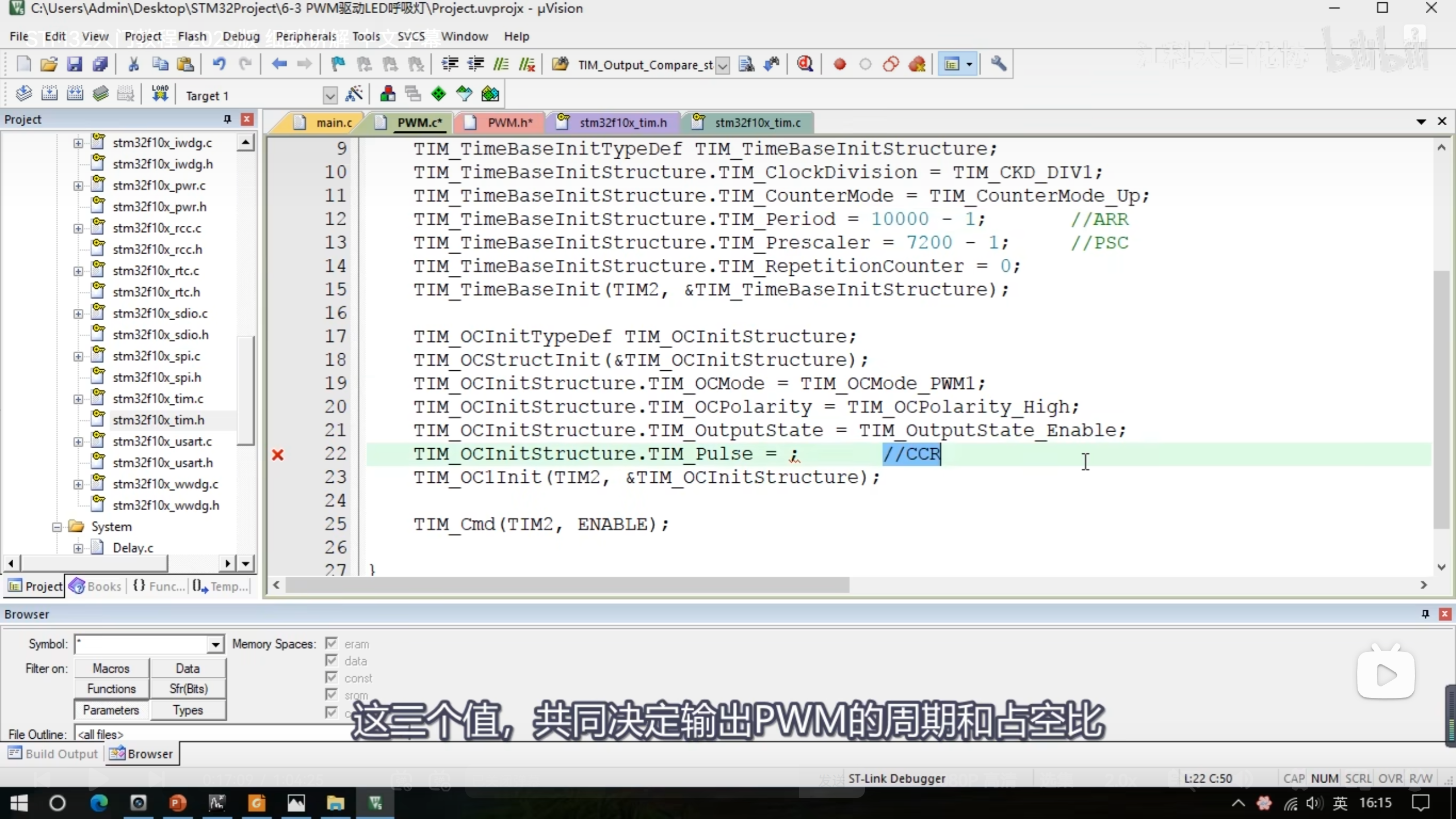
12


13

14
15

16
17
18



19
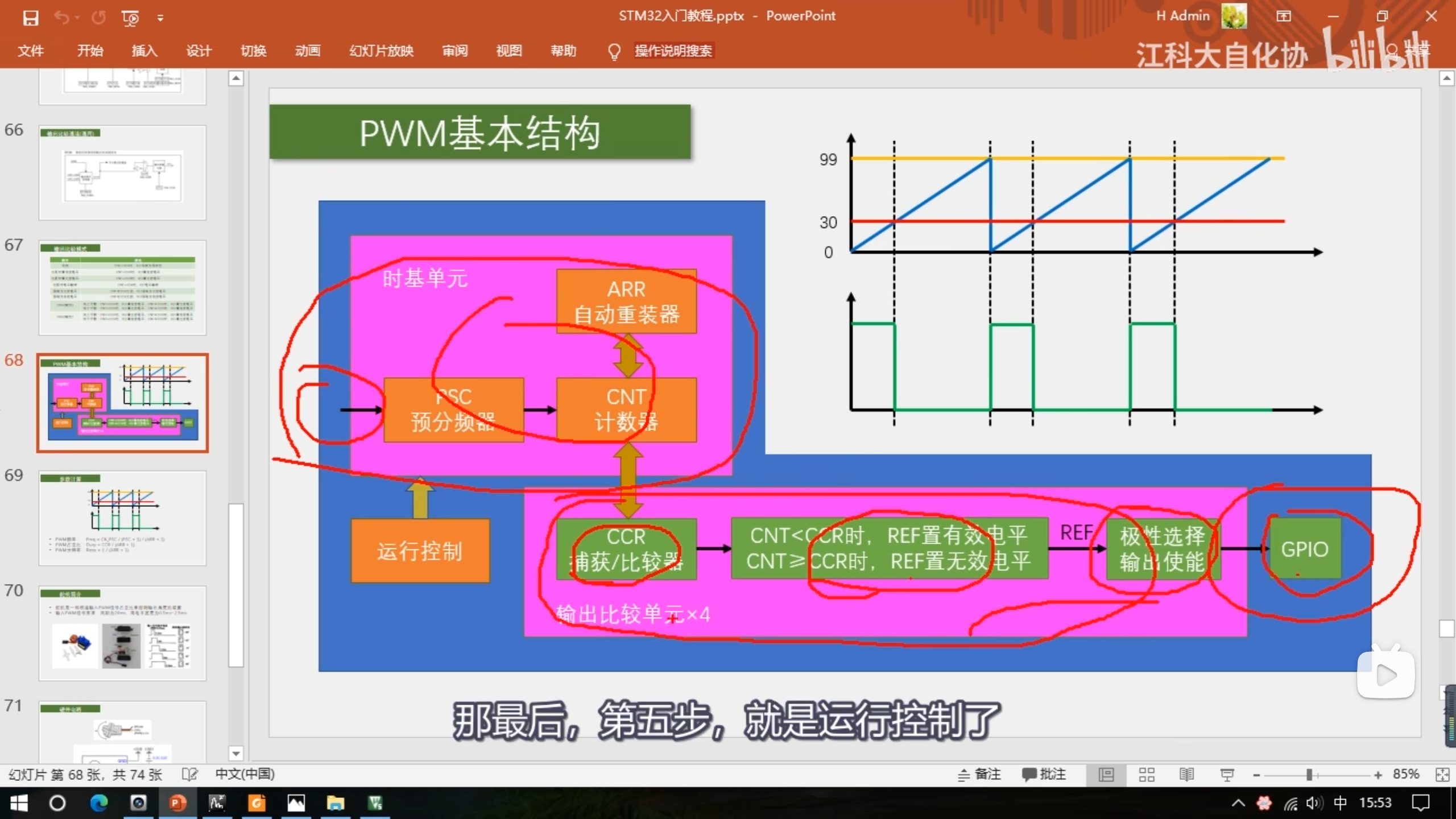
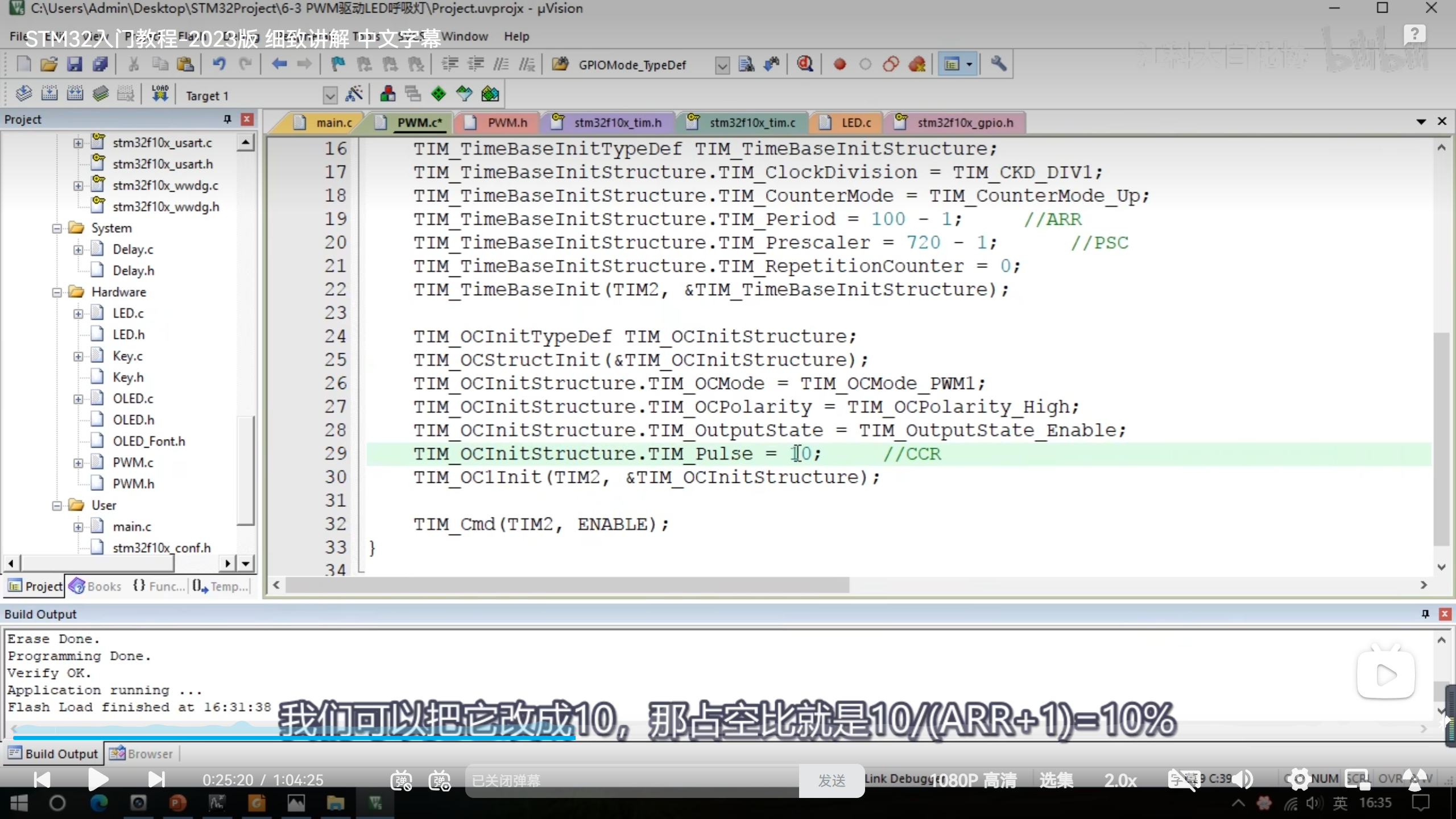
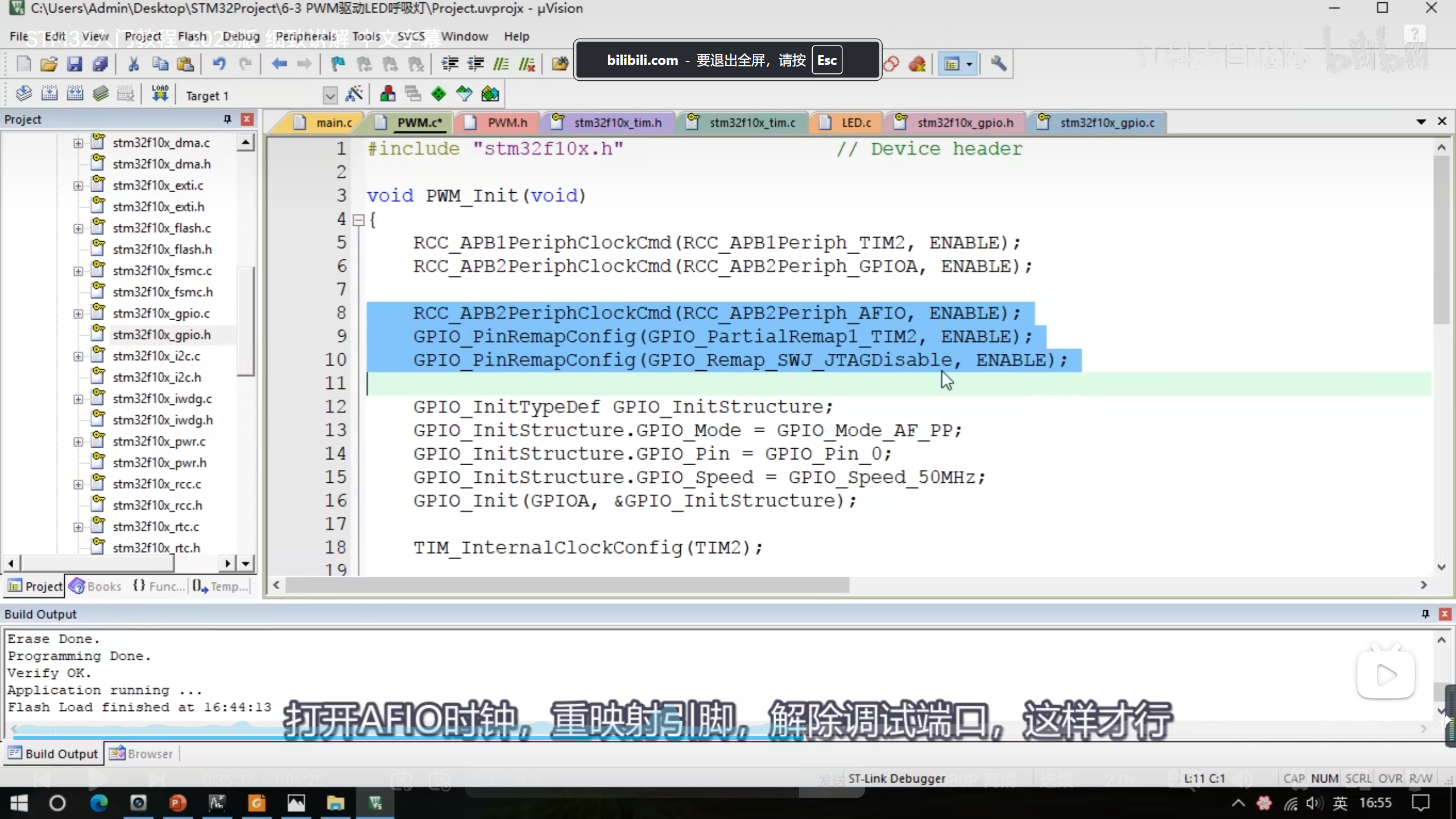
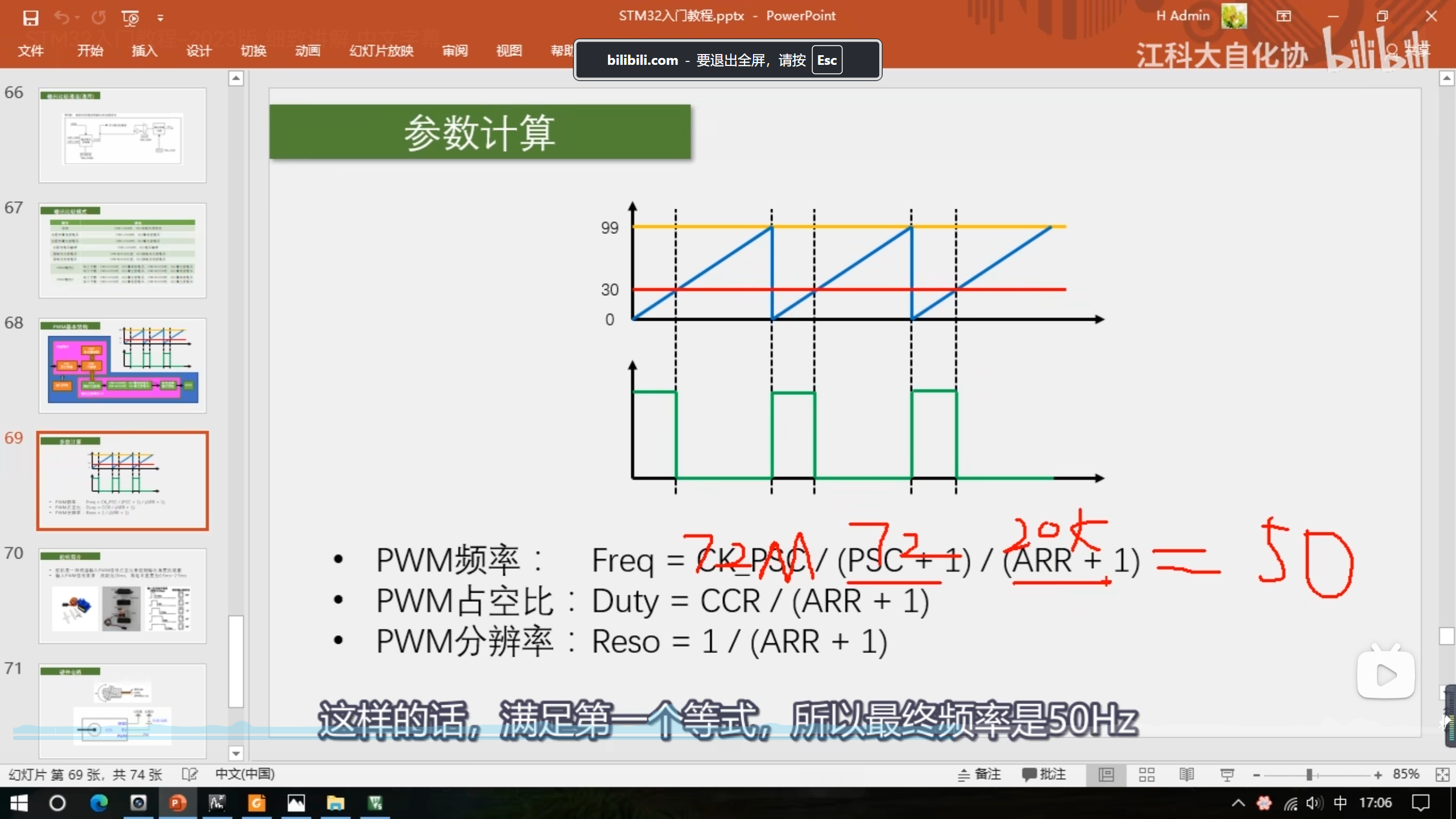
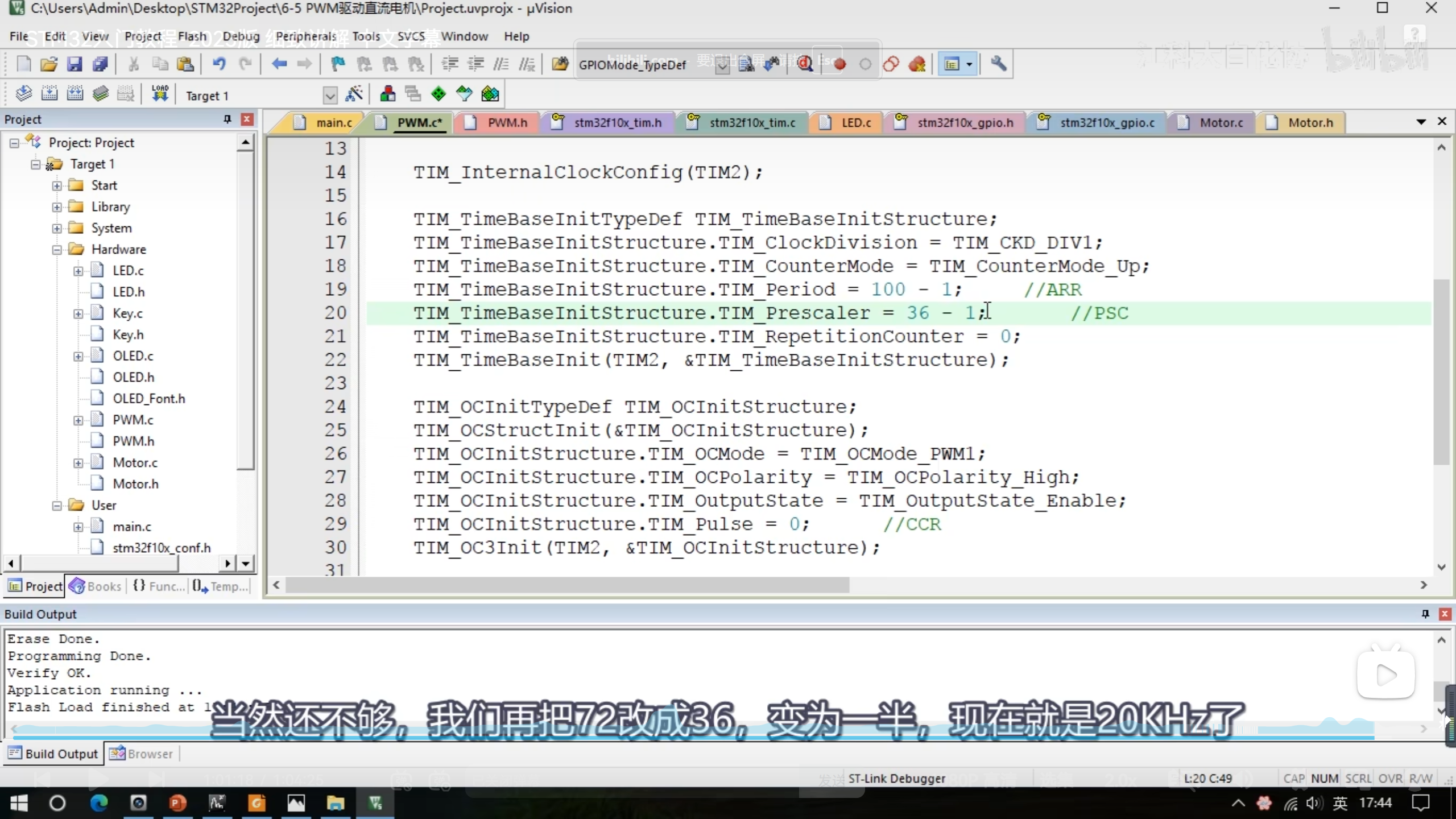
20改占空比
21

22




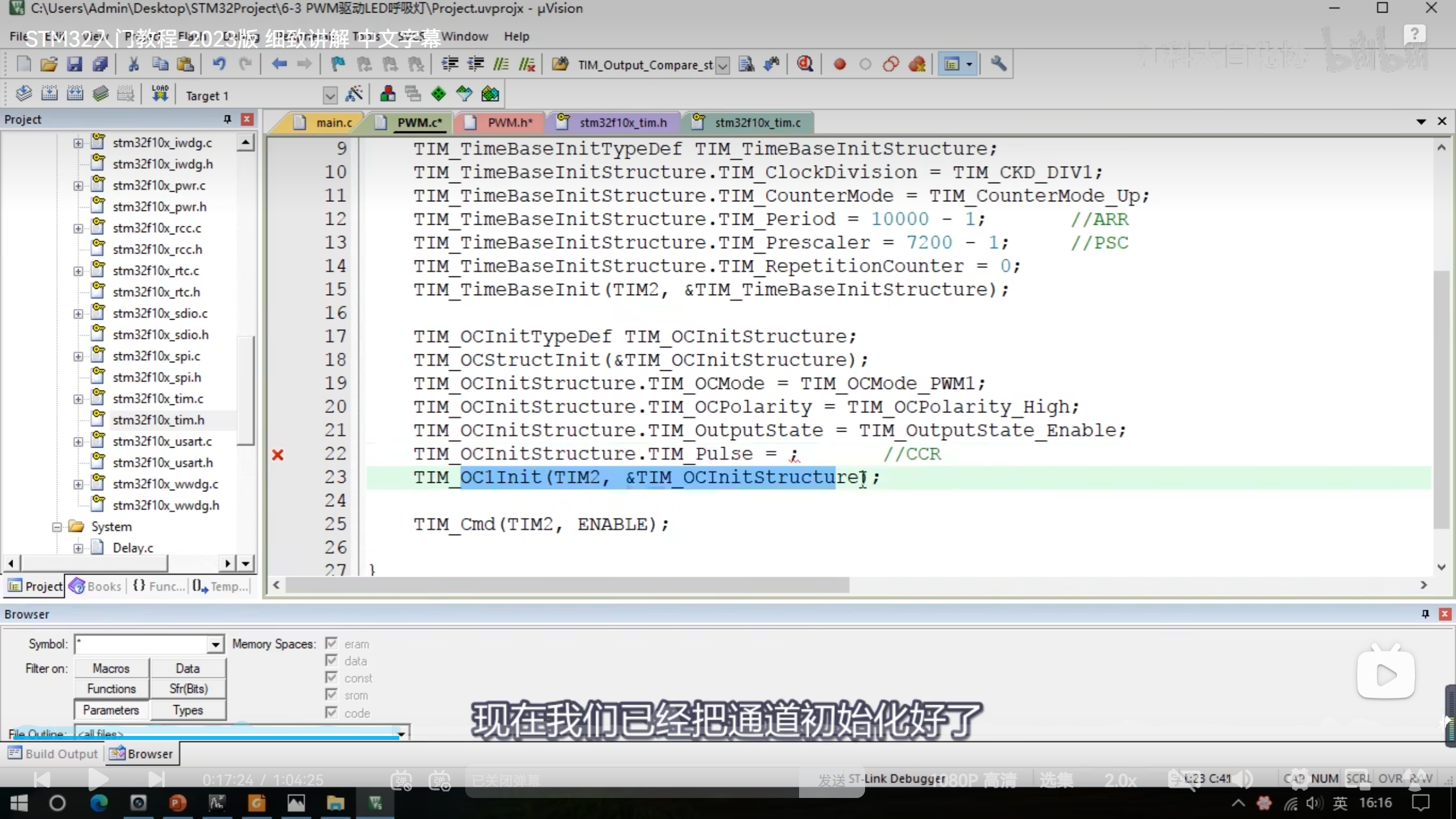
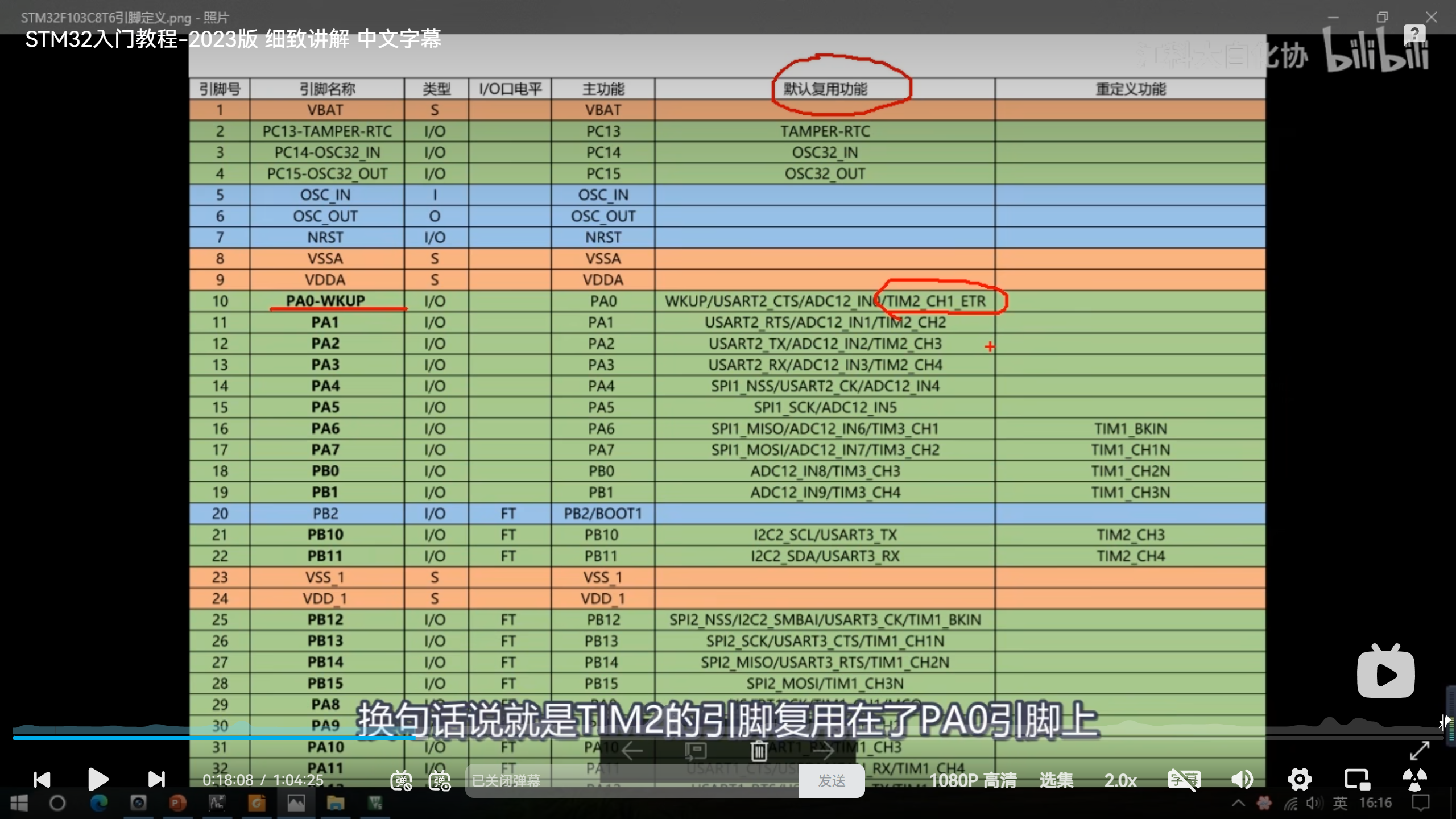
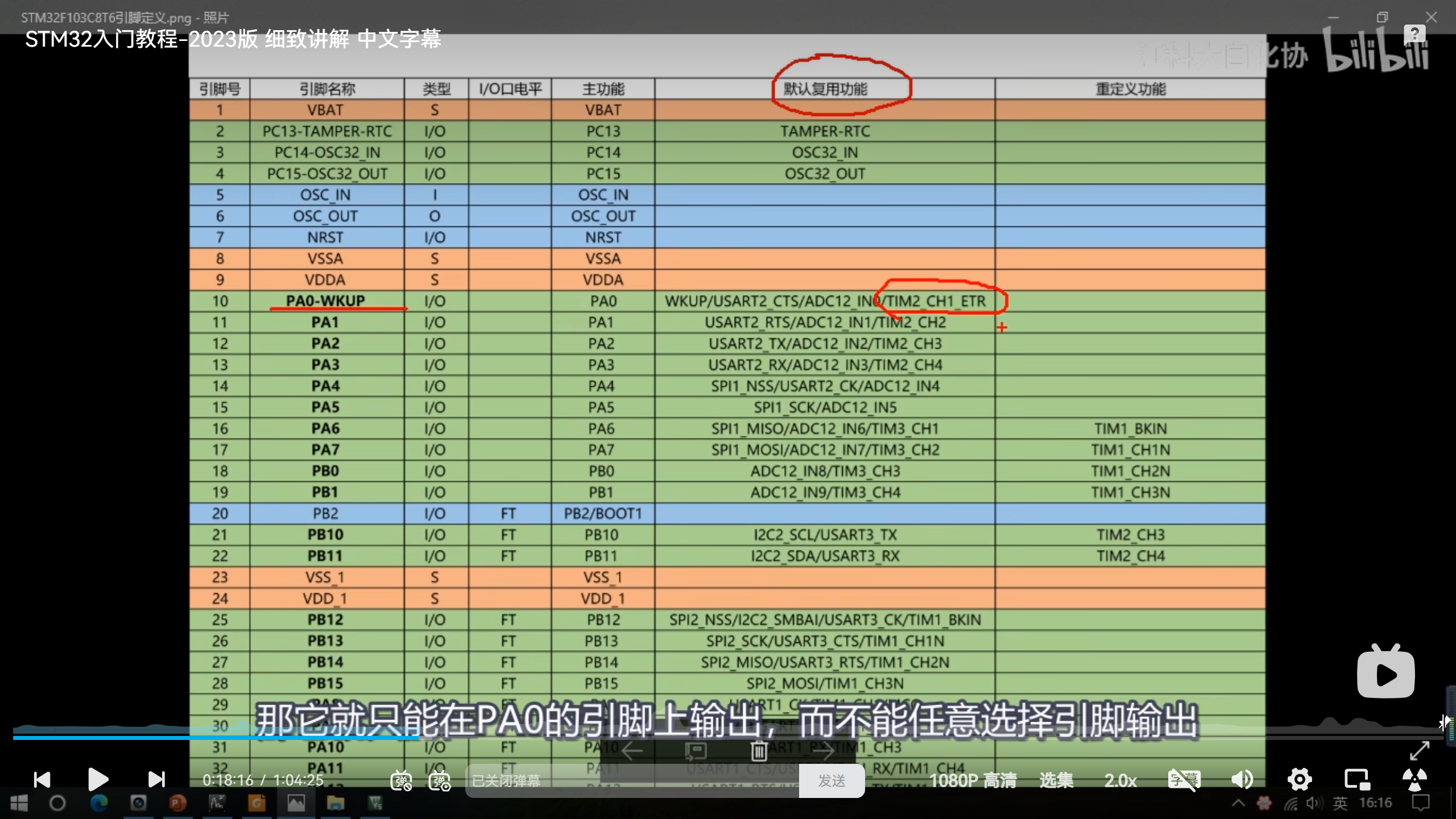
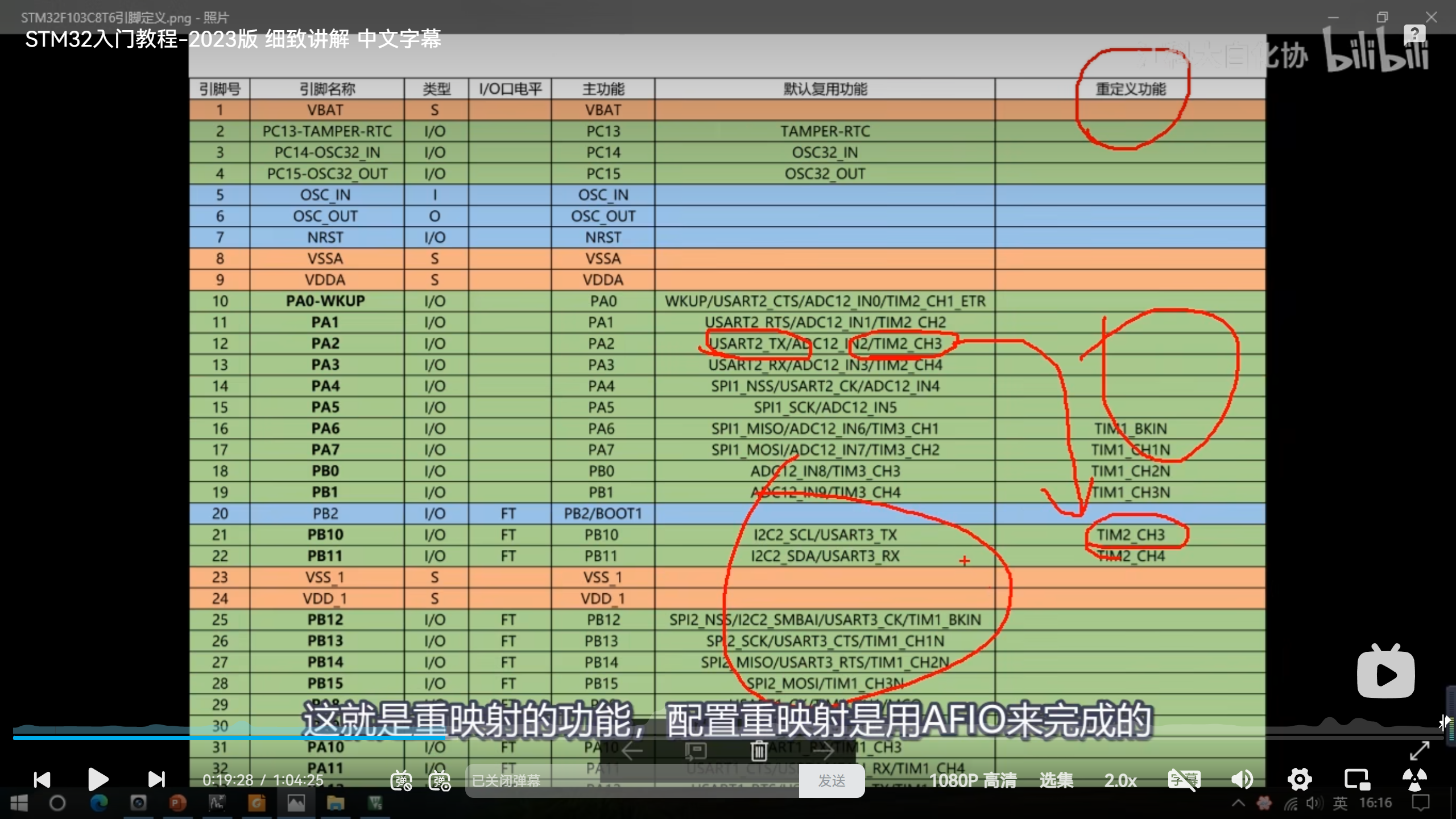
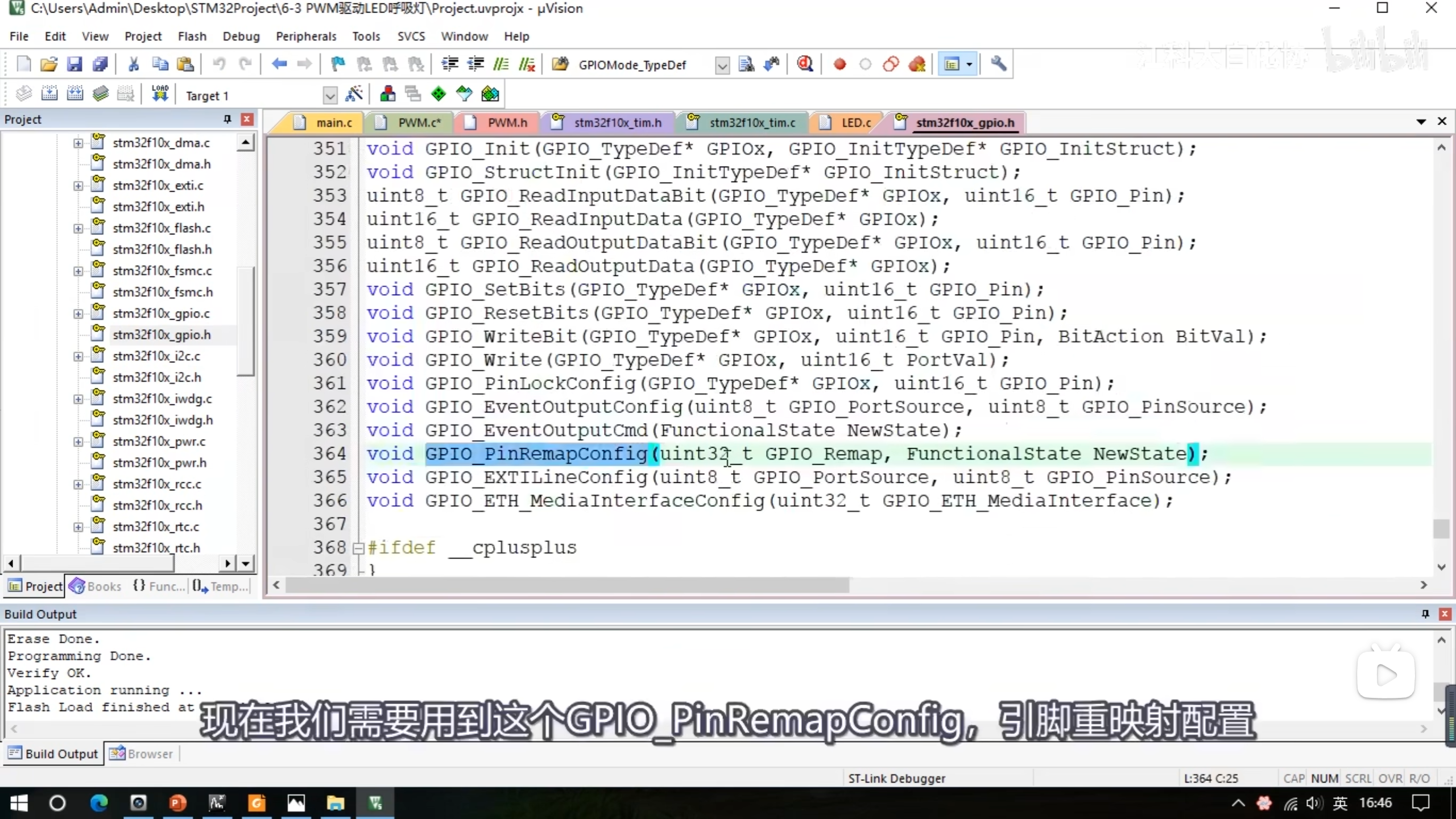
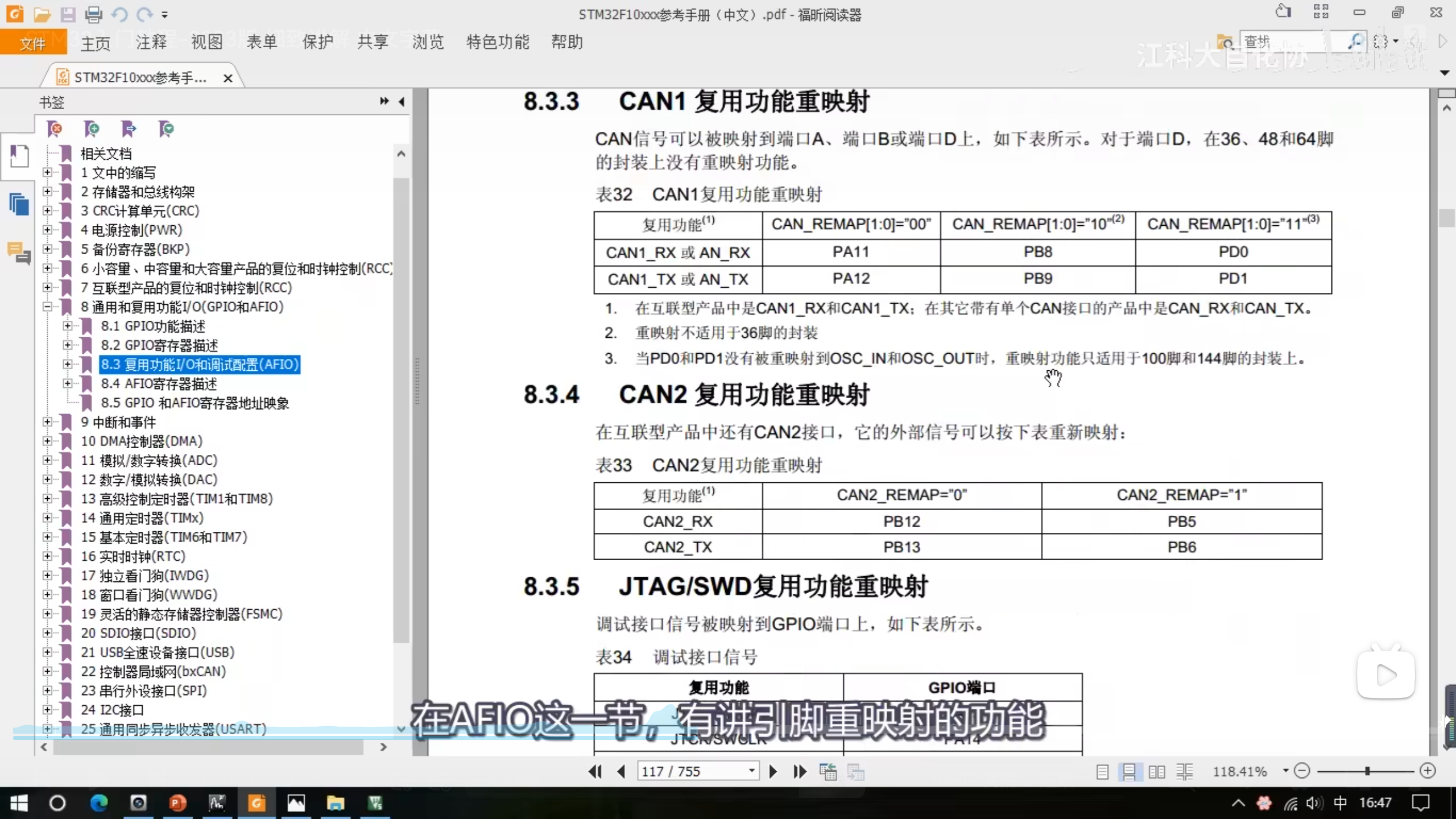
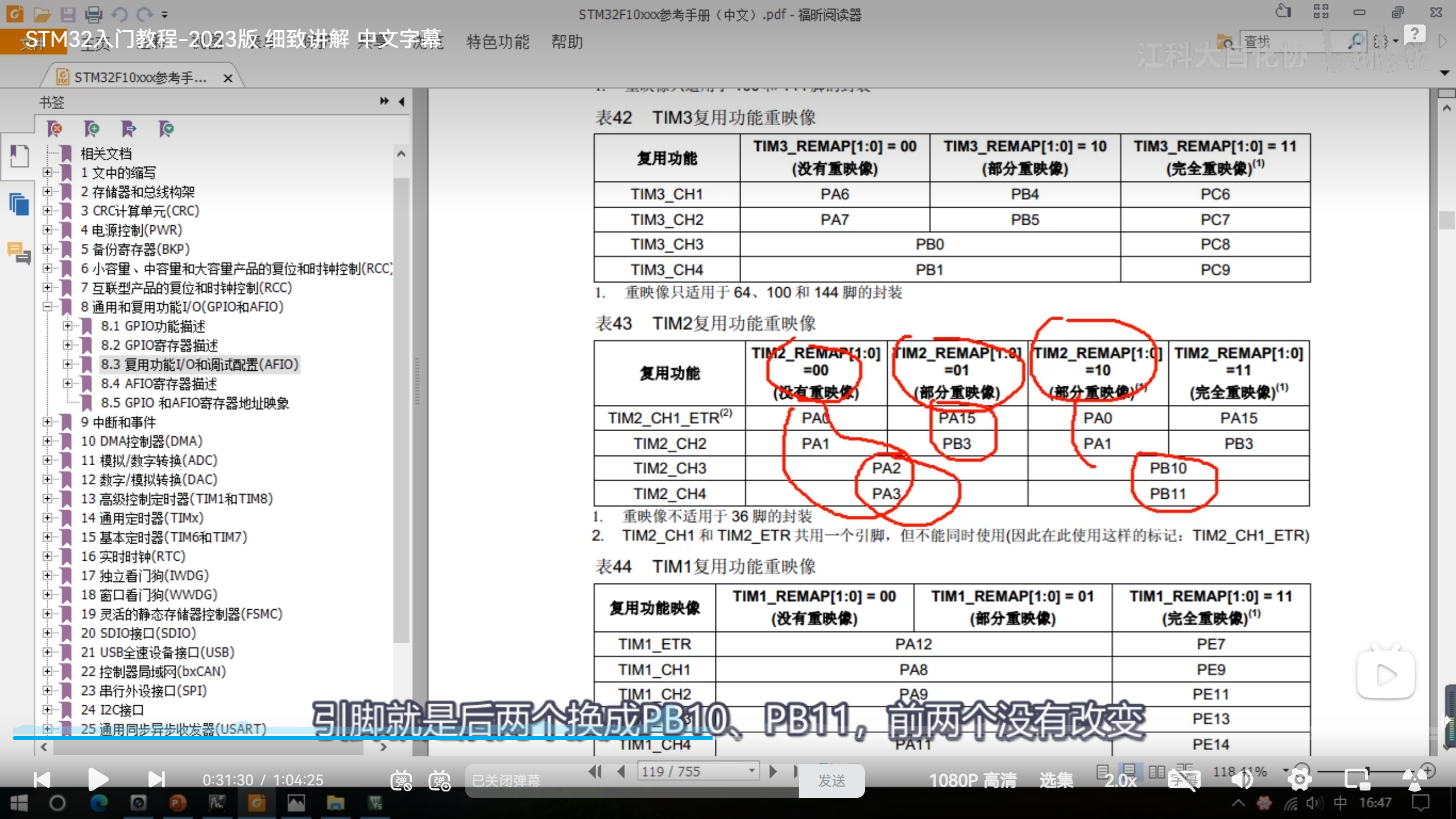
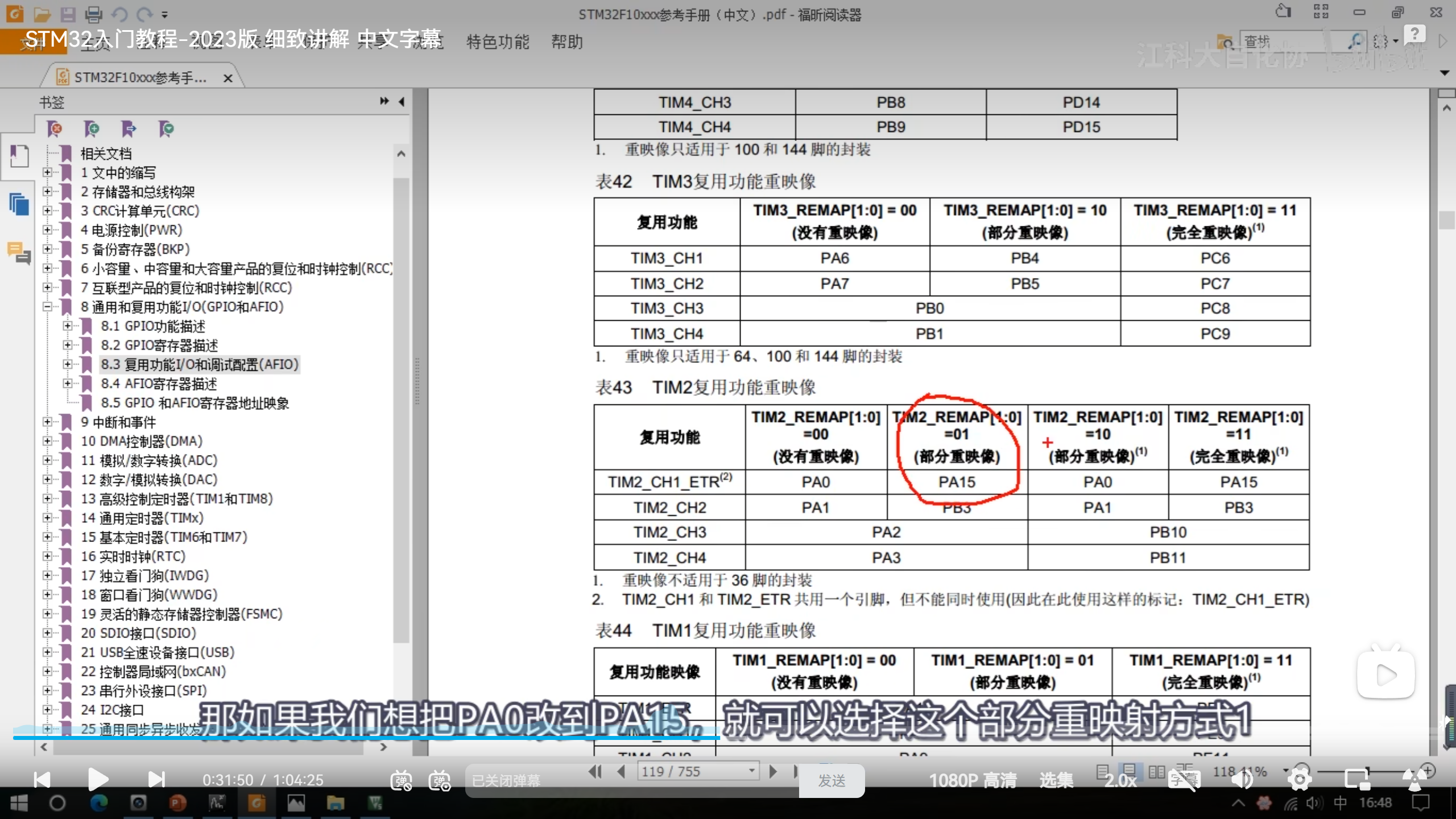
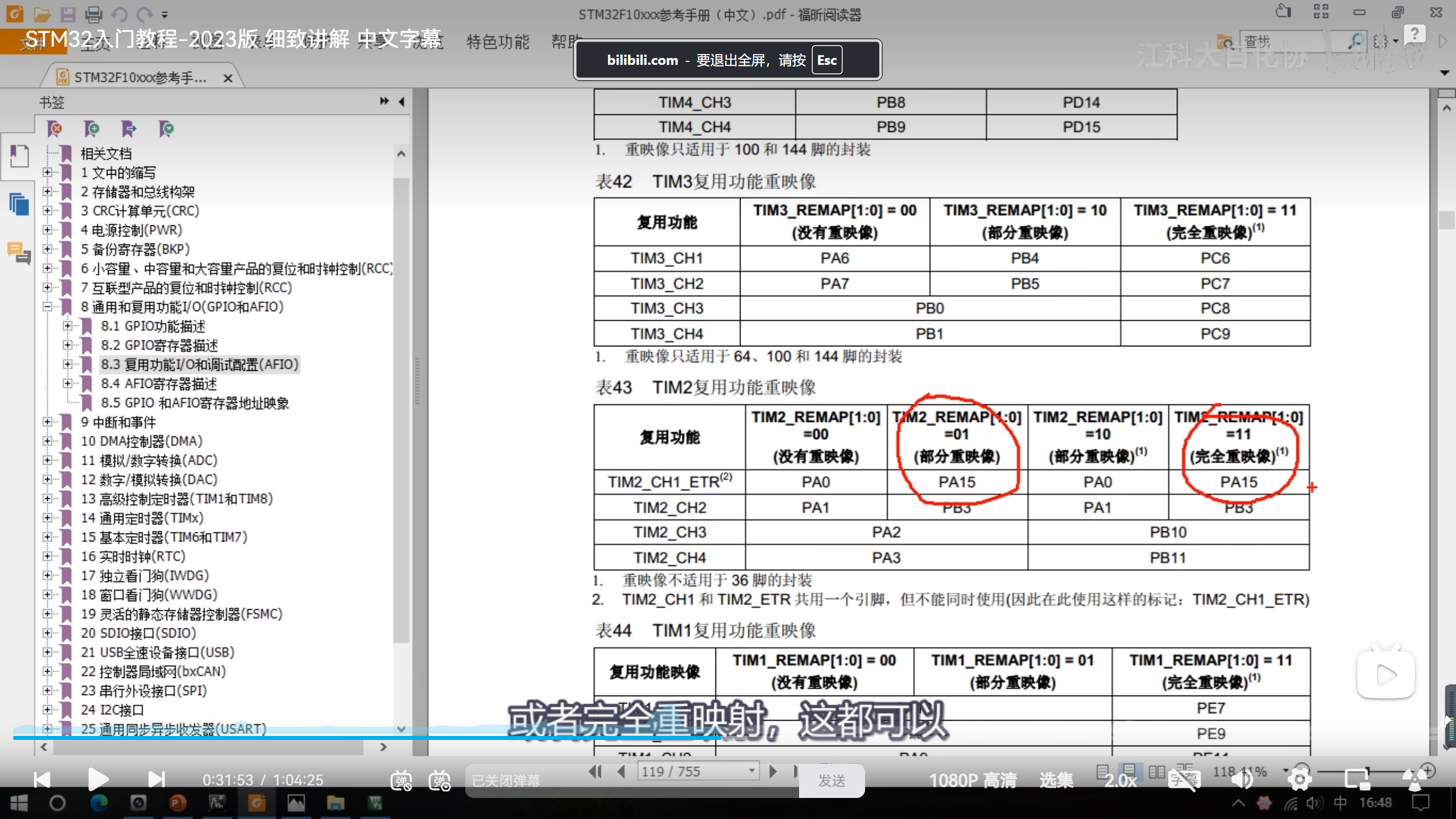
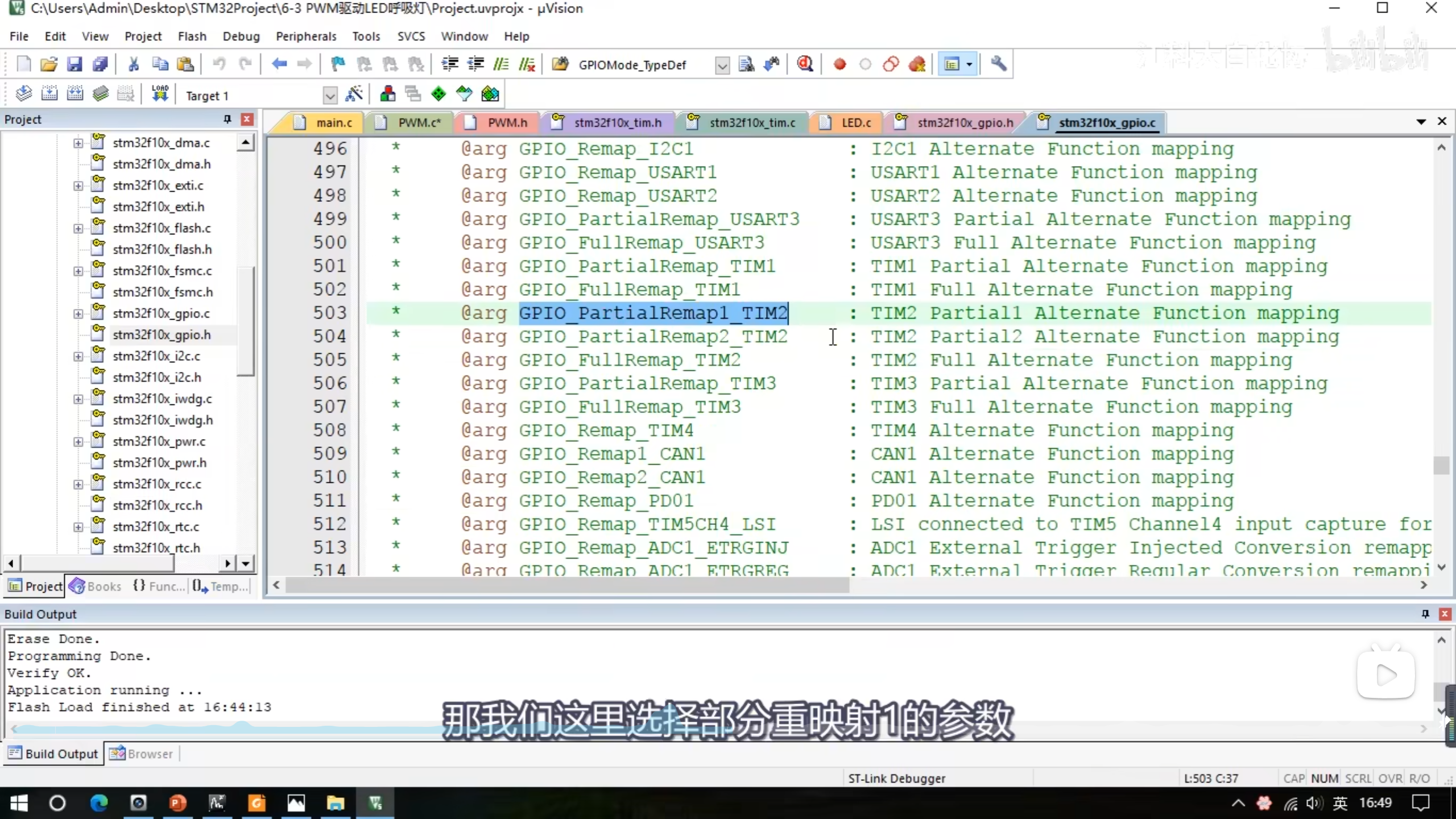
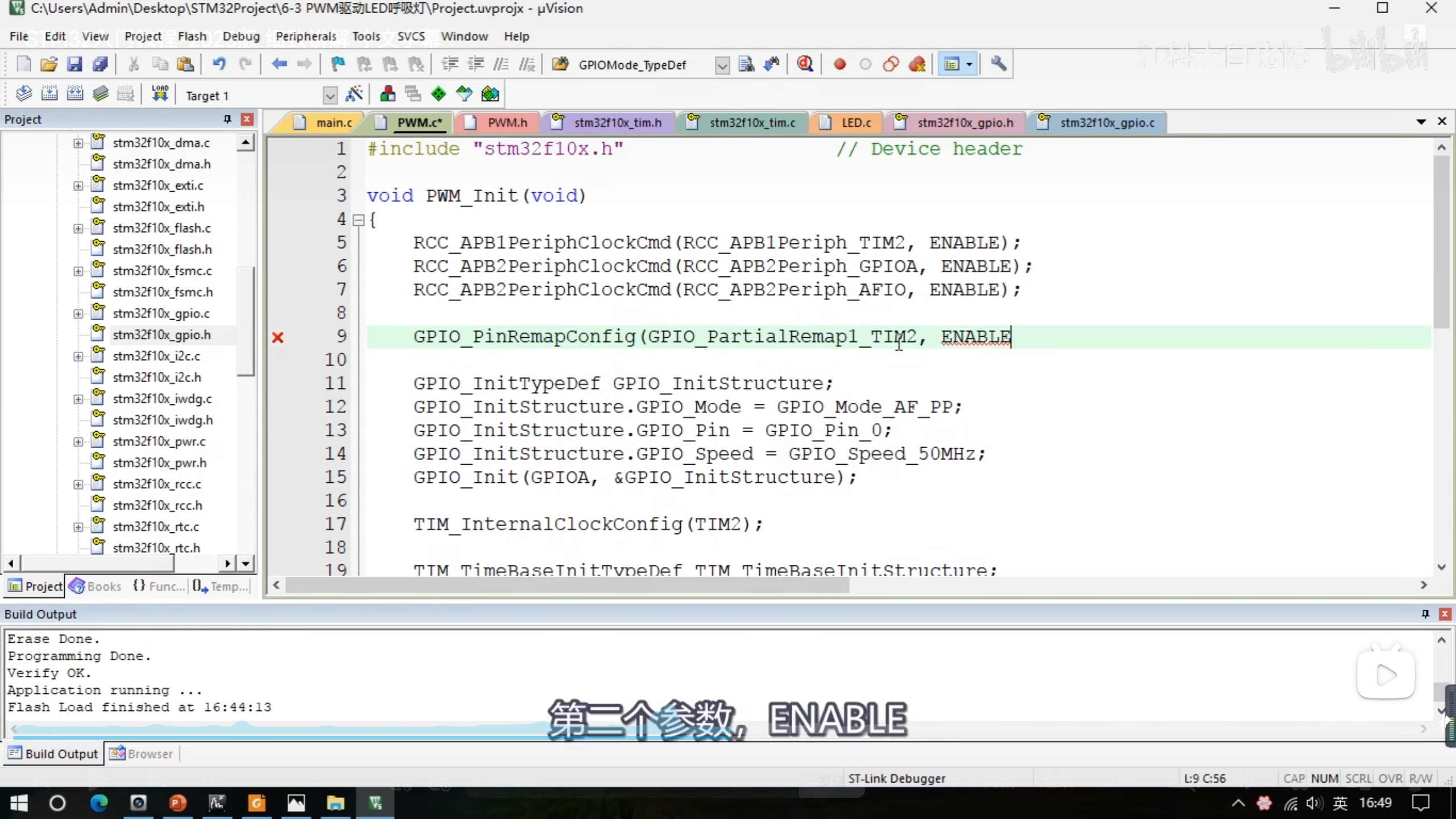
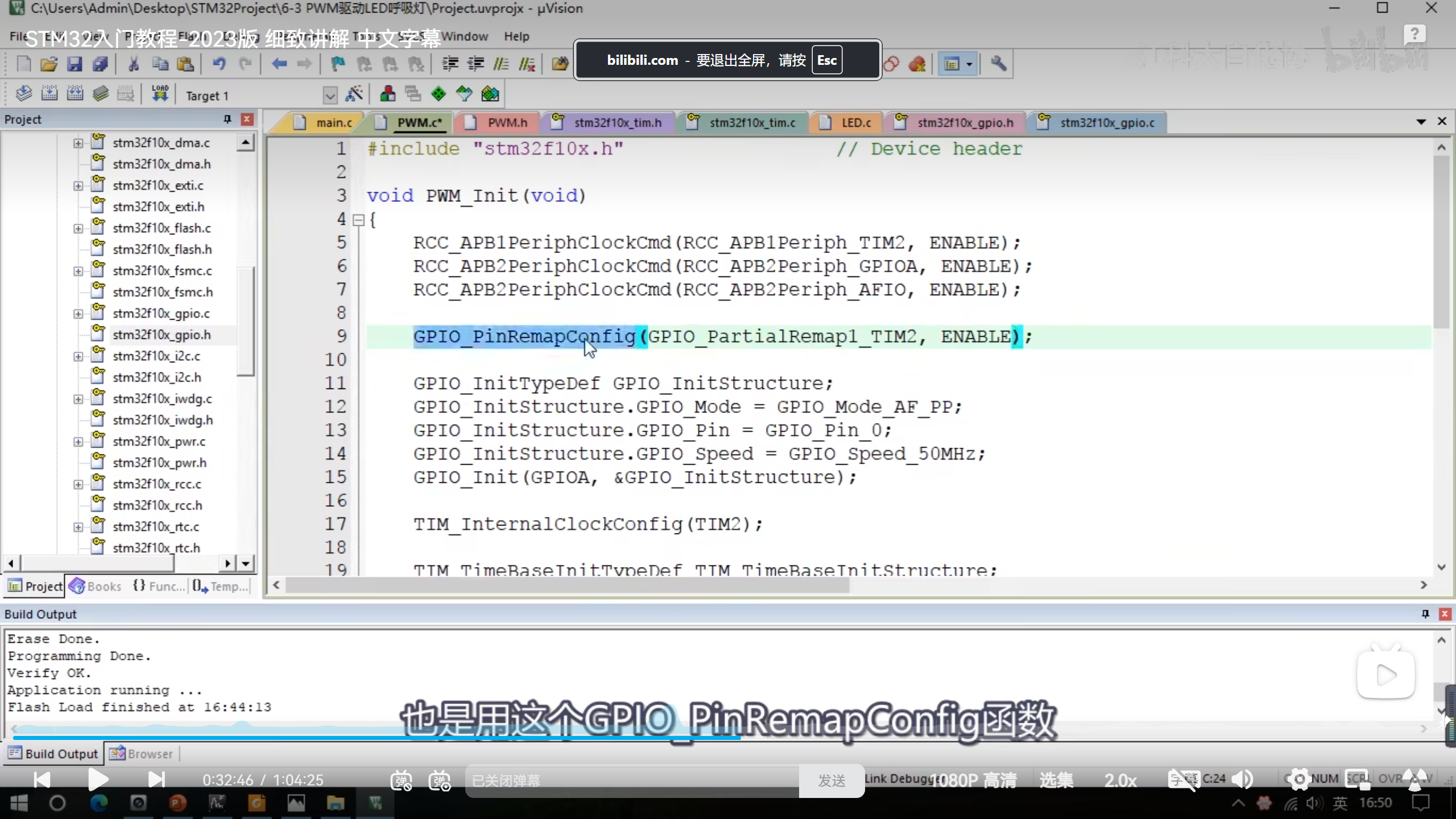
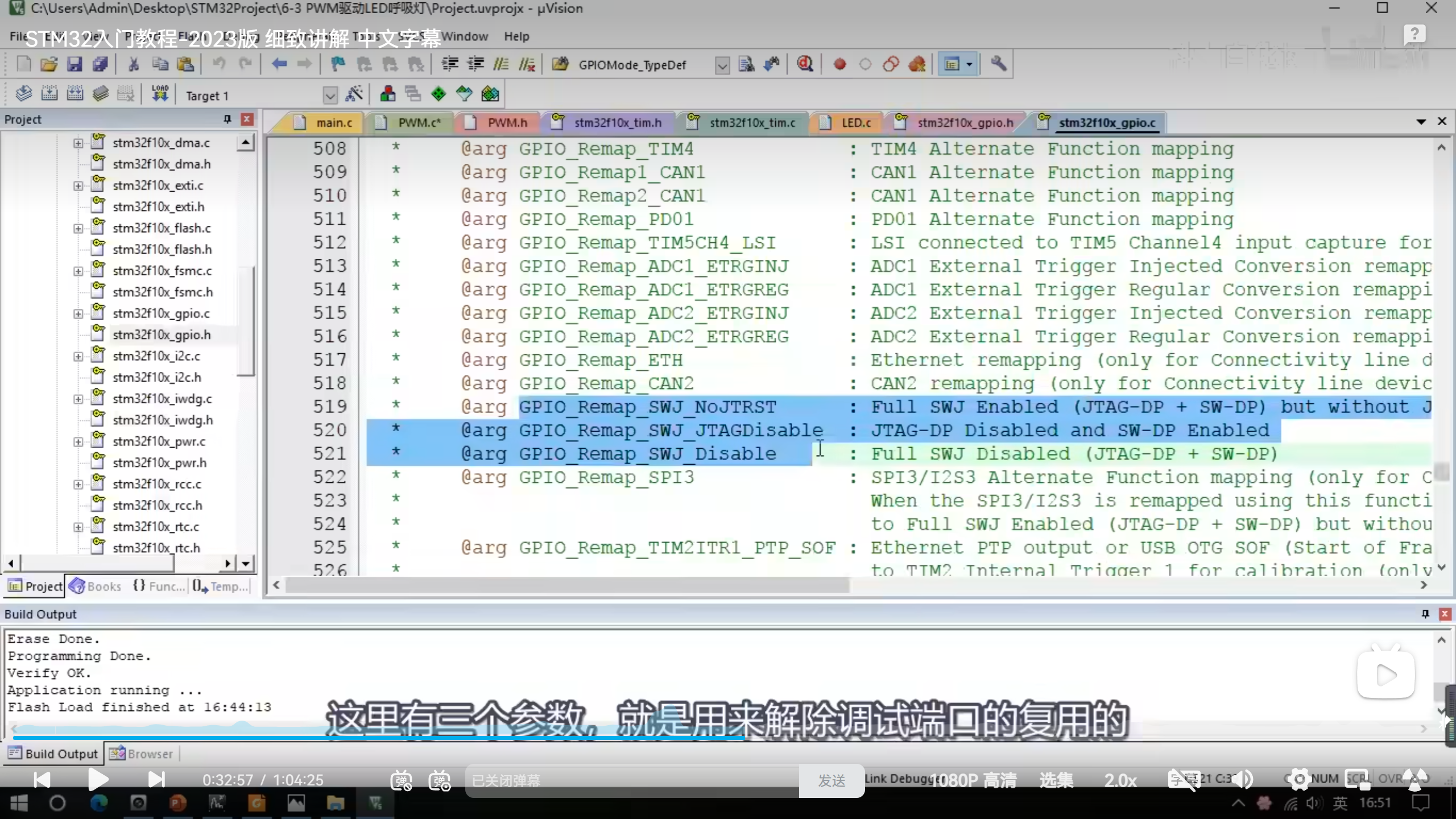
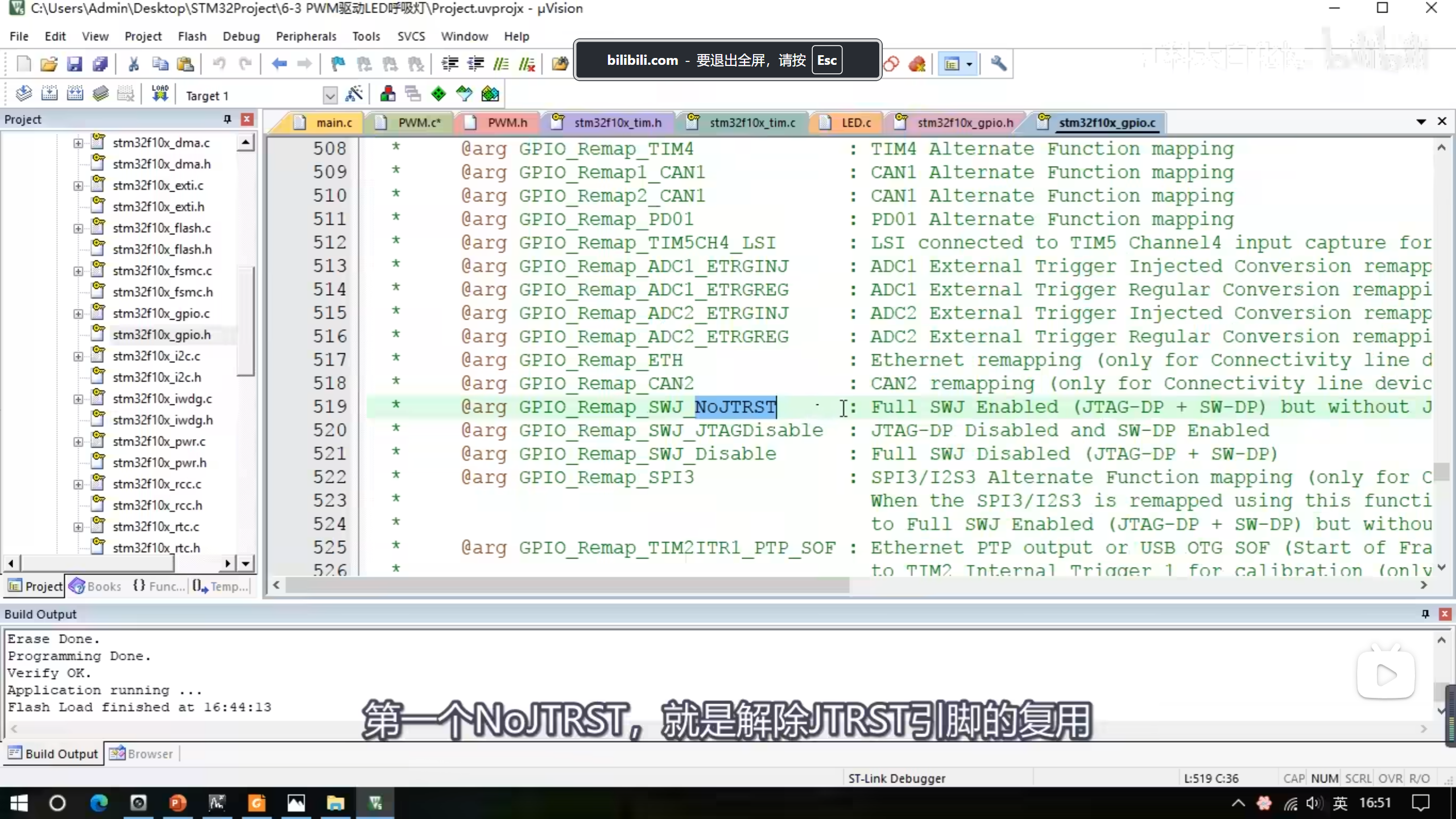
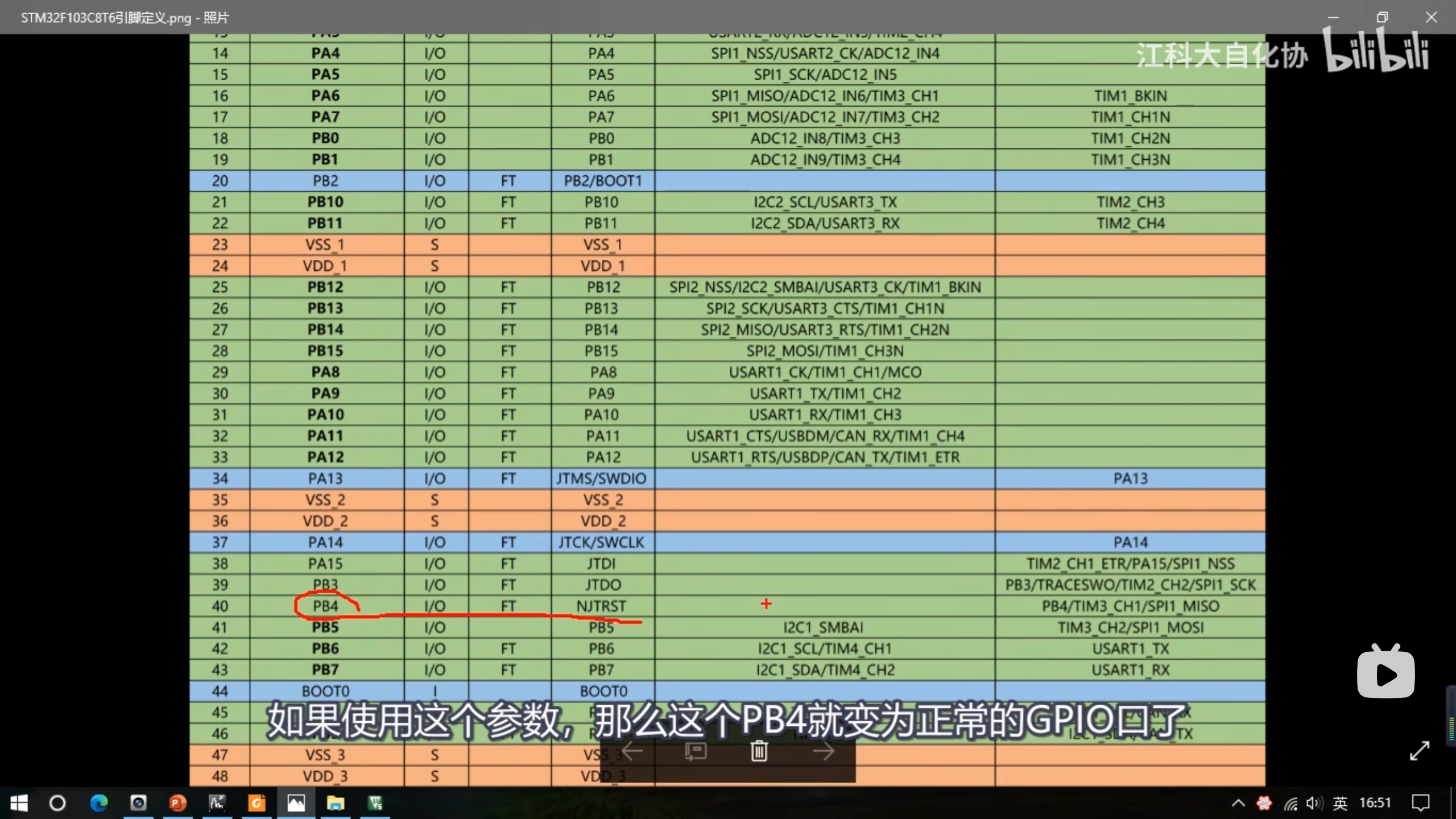
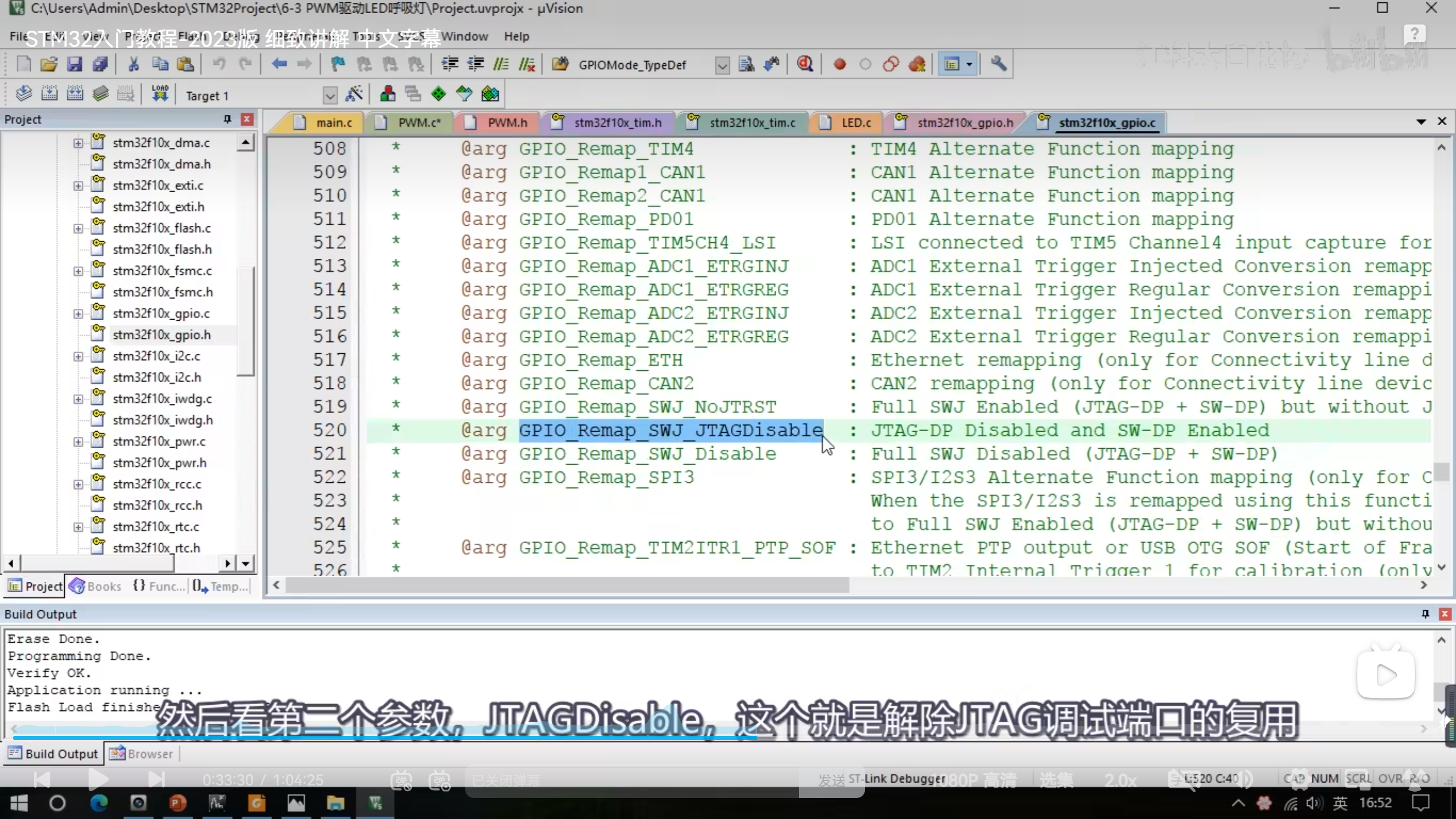
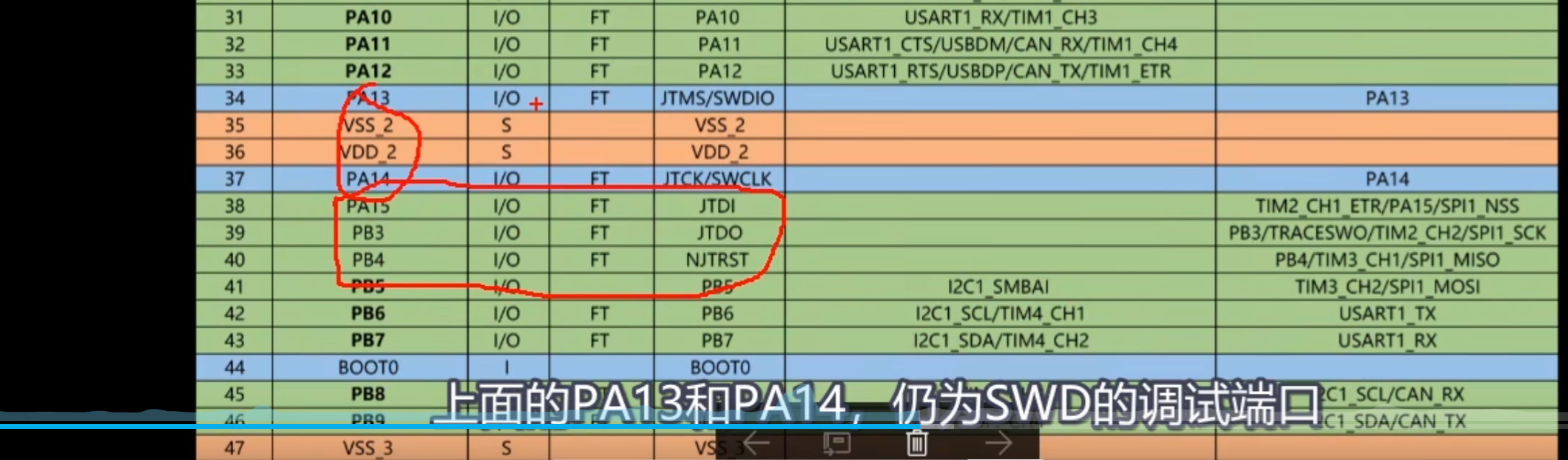
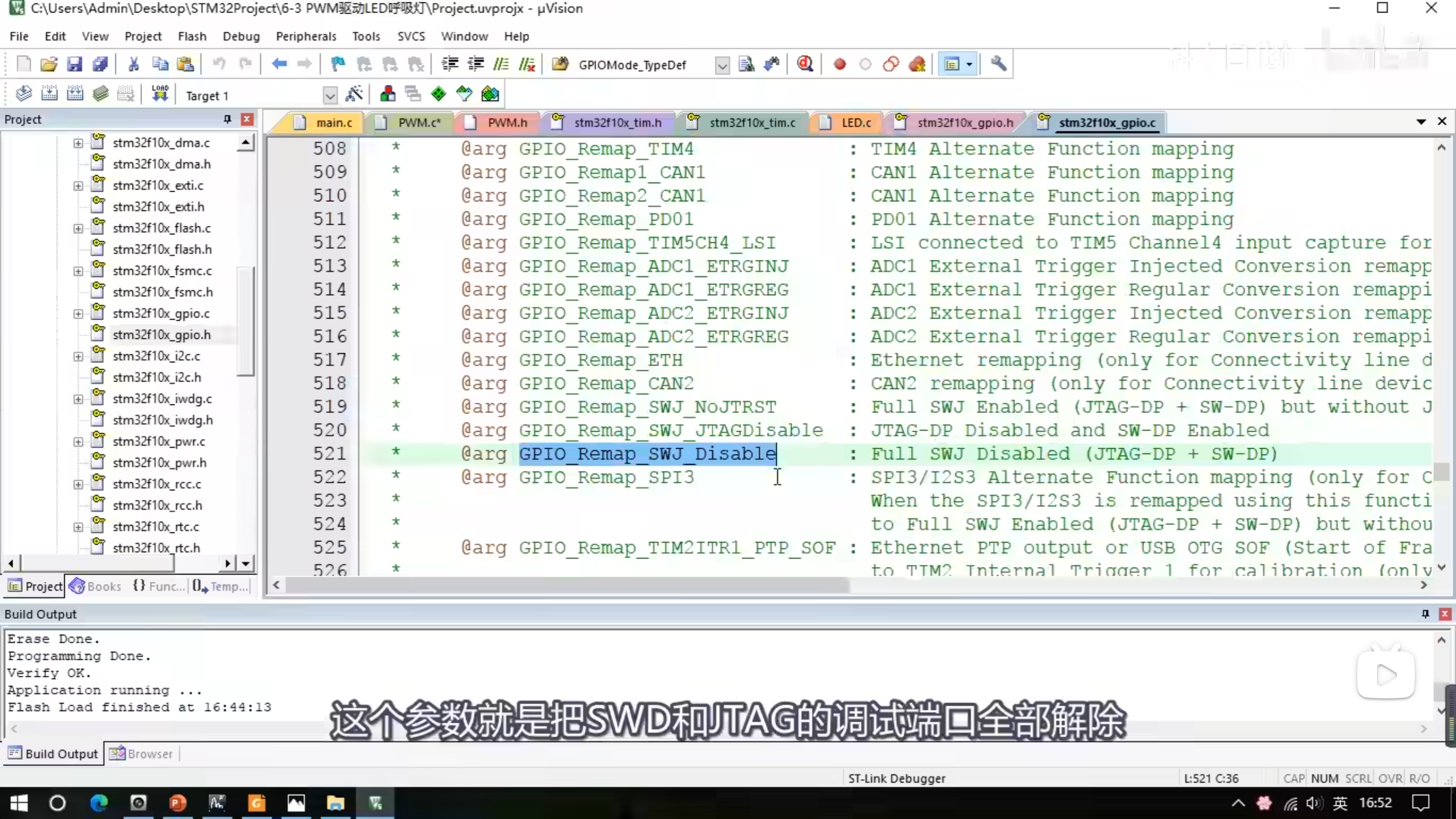
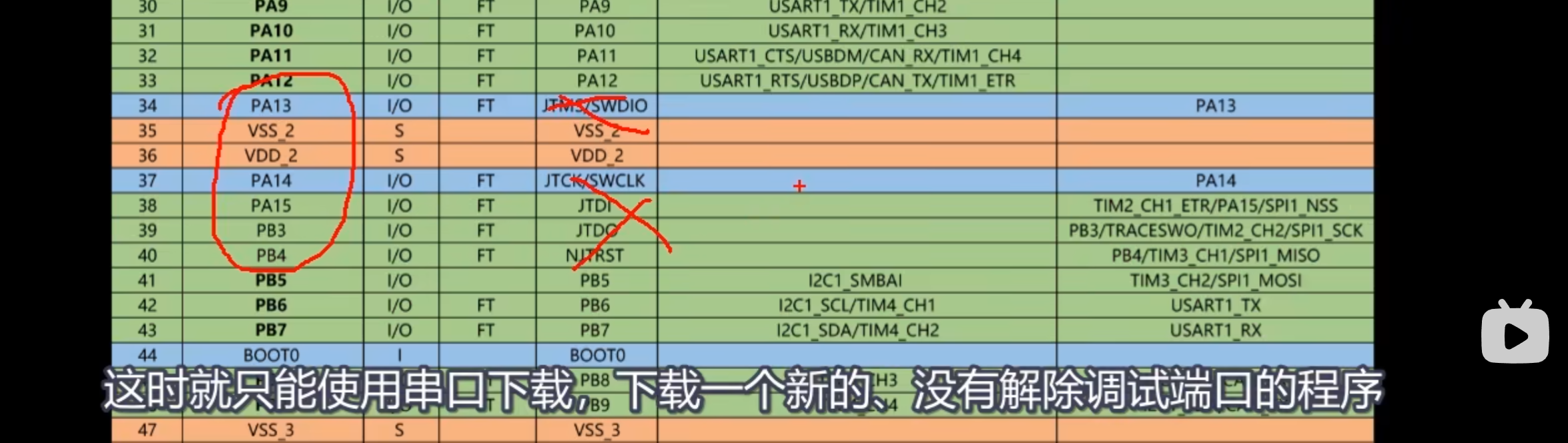
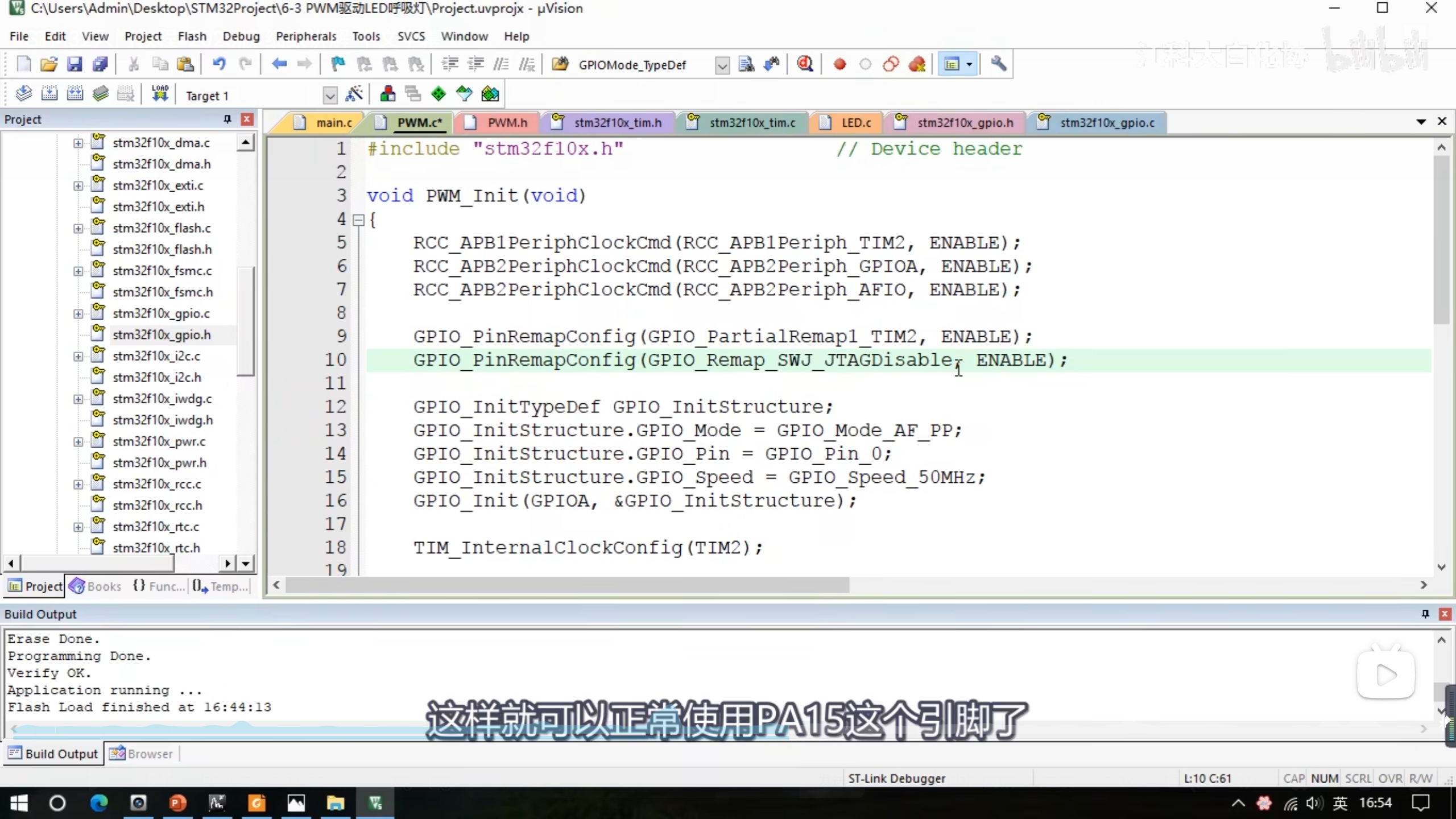
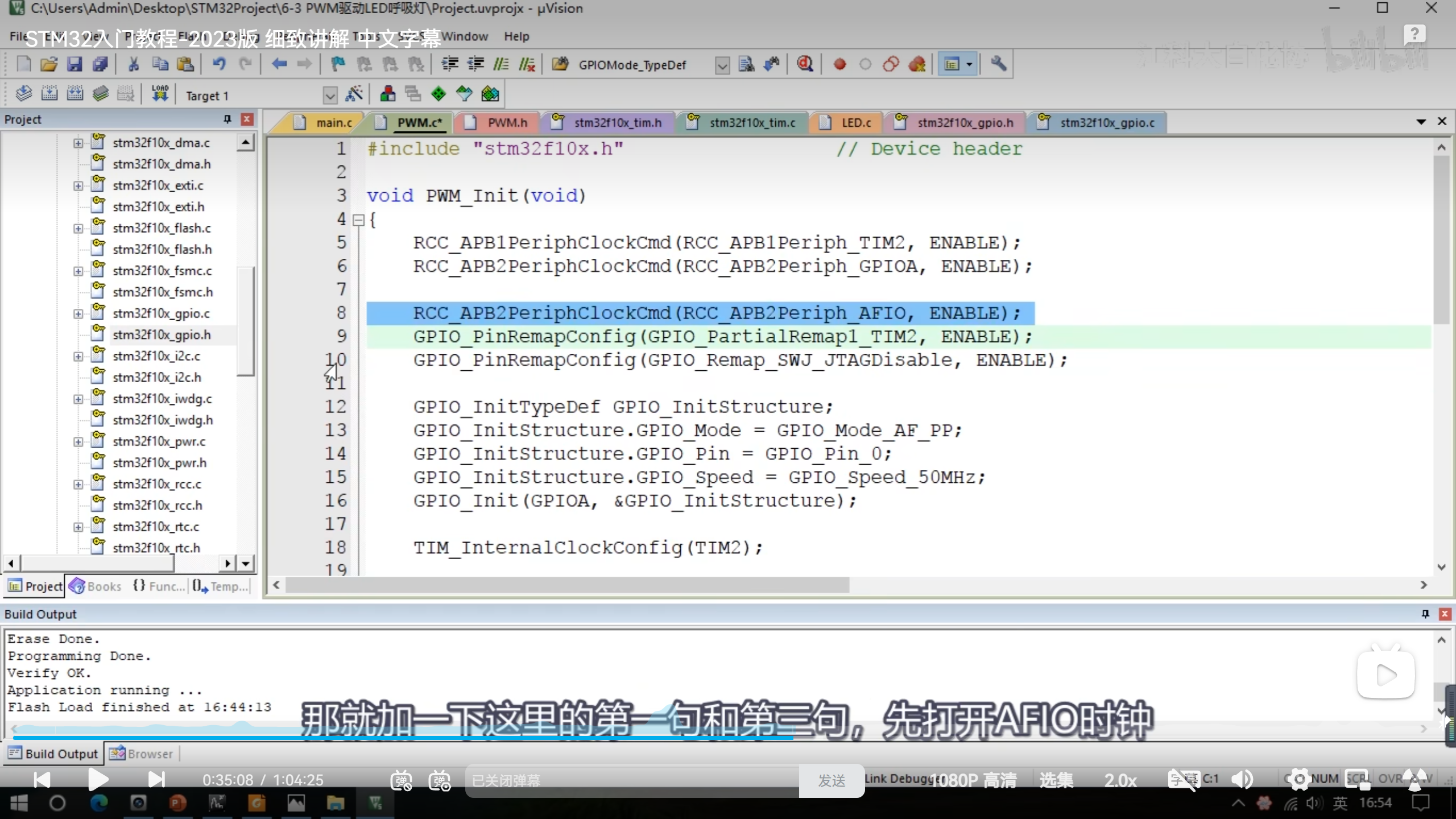
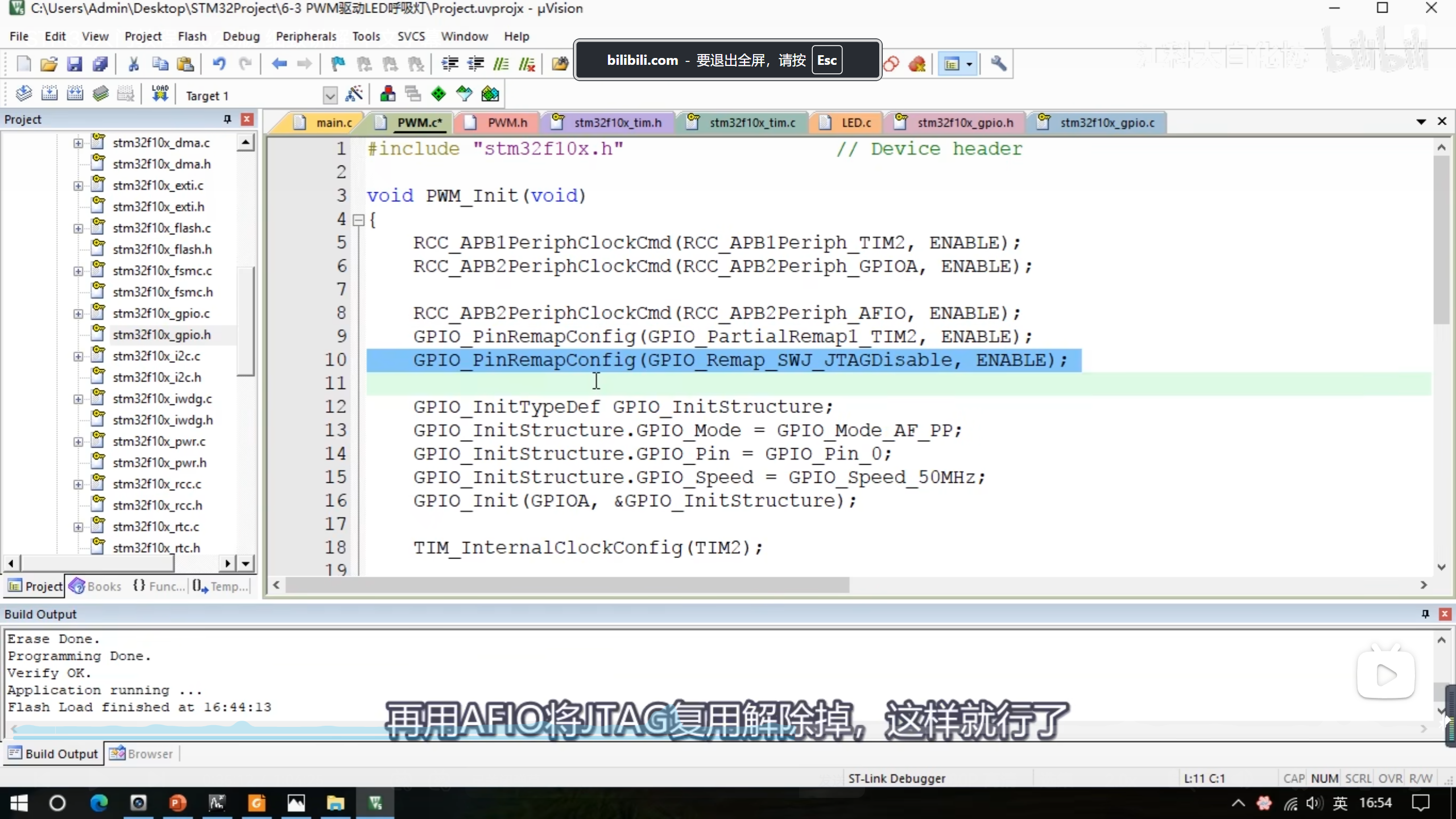
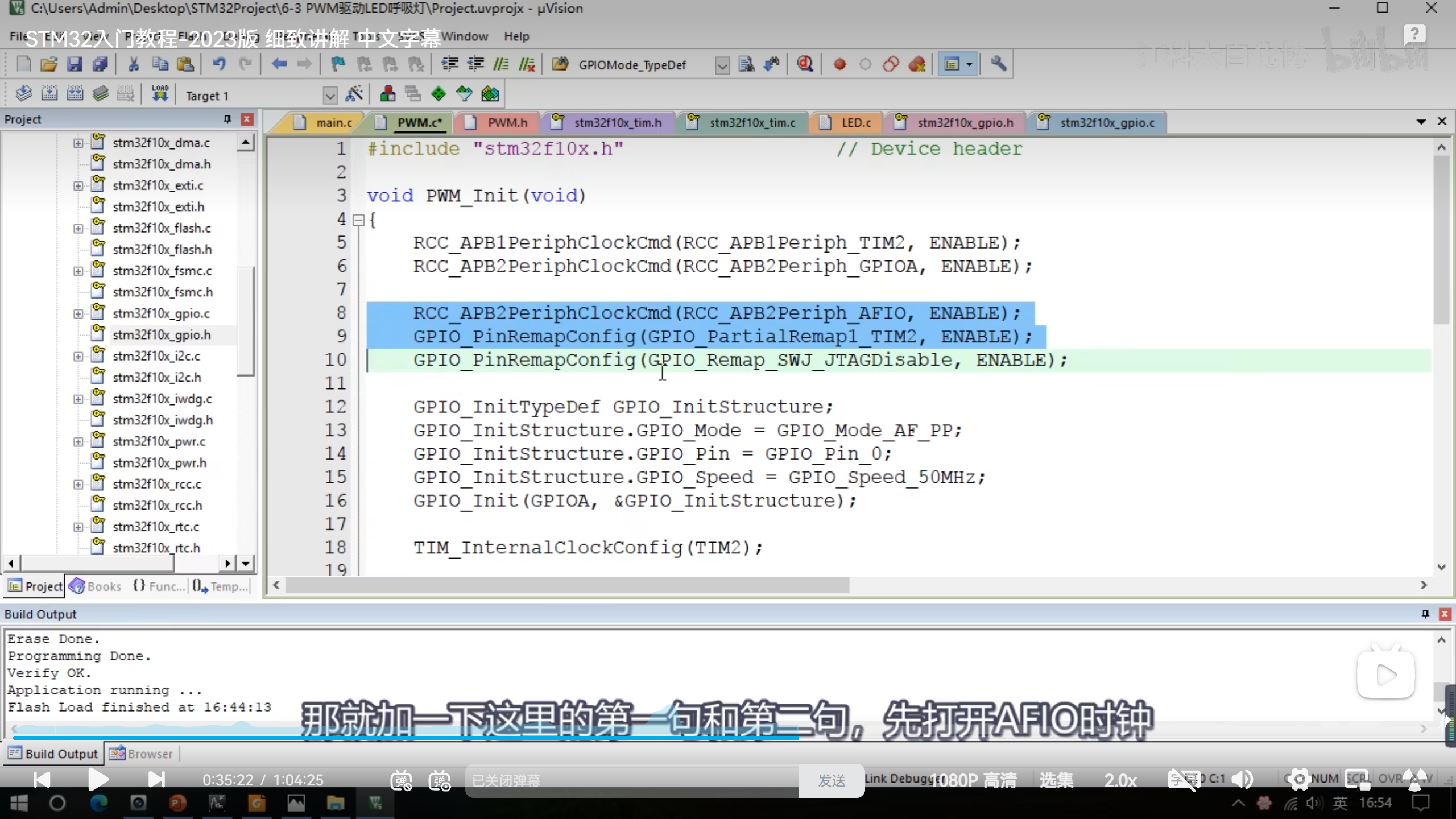
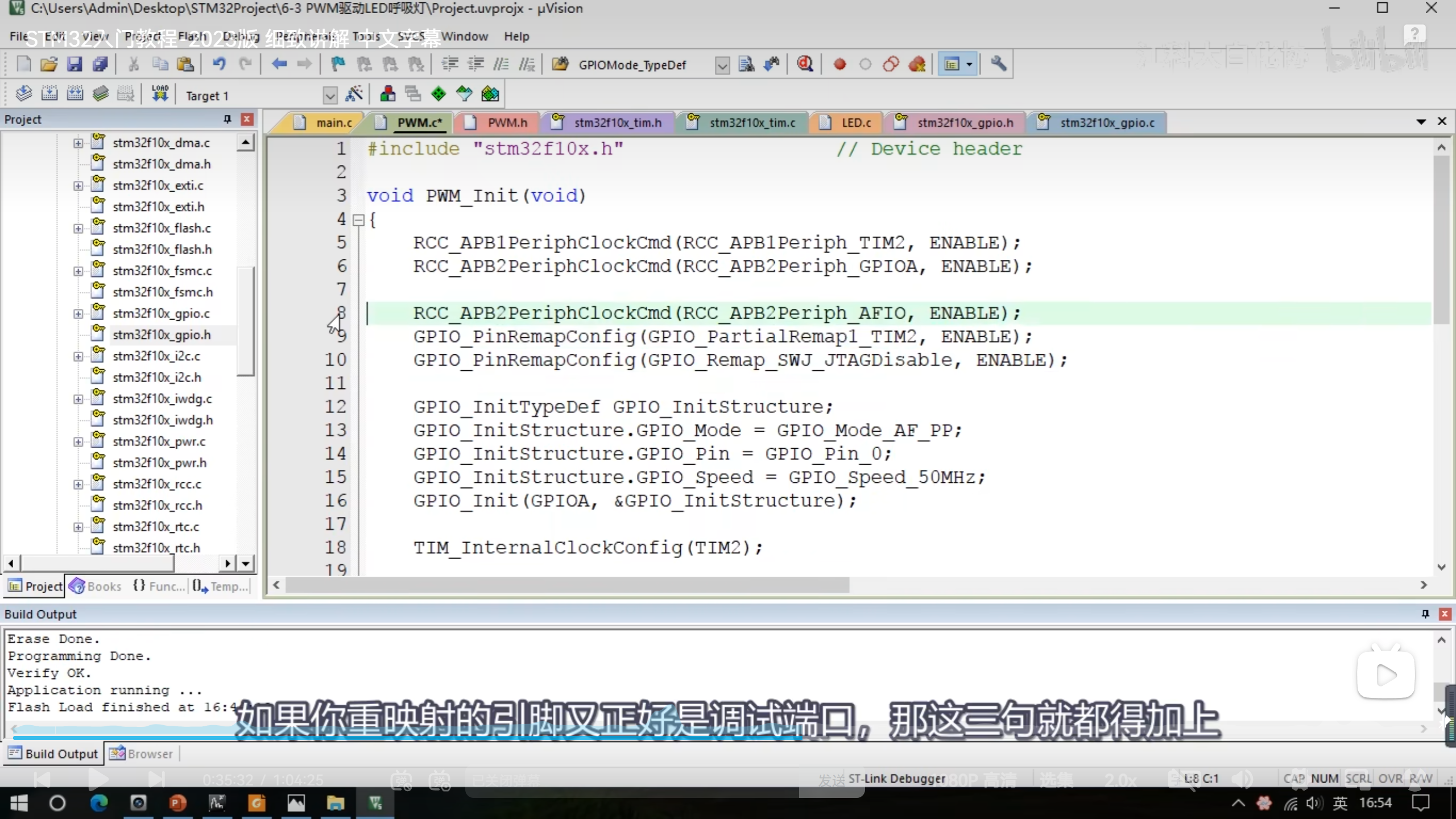
23引脚重映射











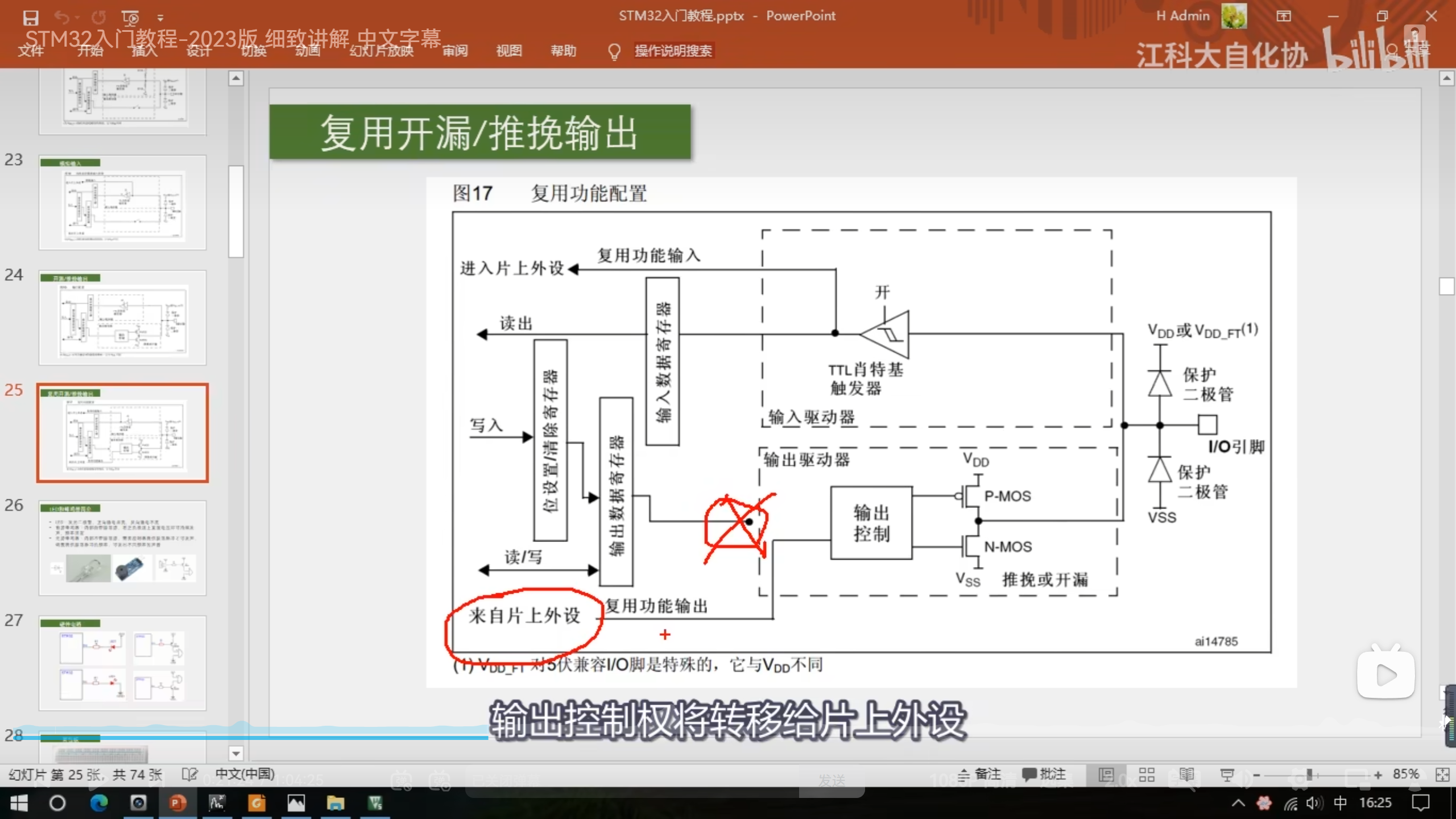
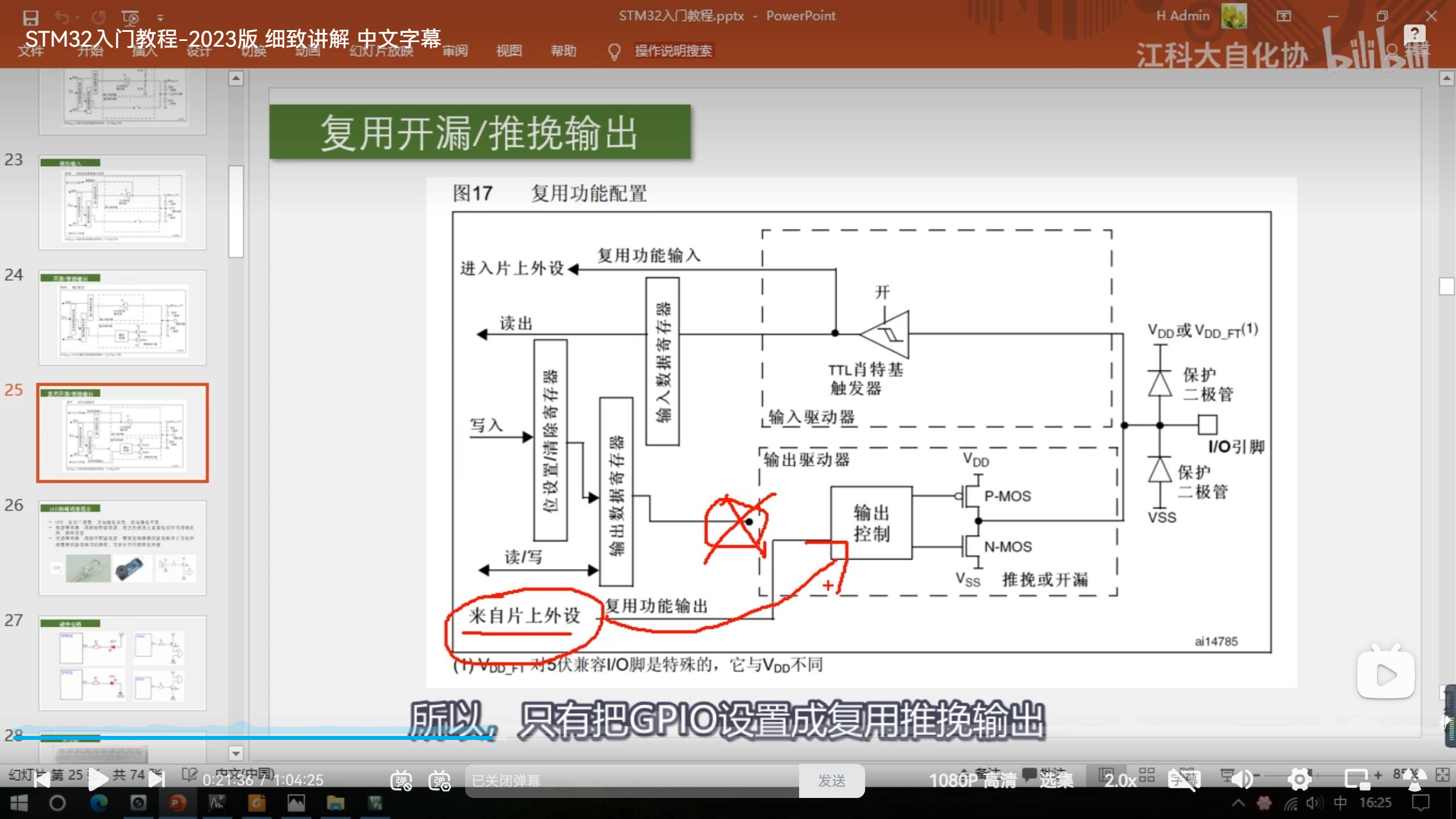
24
25


26servo.c
#include "stm32f10x.h" // Device header
#include "PWM.h"
/**
* 函 数:舵机初始化
* 参 数:无
* 返 回 值:无
*/
void Servo_Init(void)
{
PWM_Init(); //初始化舵机的底层PWM
}
/**
* 函 数:舵机设置角度
* 参 数:Angle 要设置的舵机角度,范围:0~180
* 返 回 值:无
*/
void Servo_SetAngle(float Angle)
{
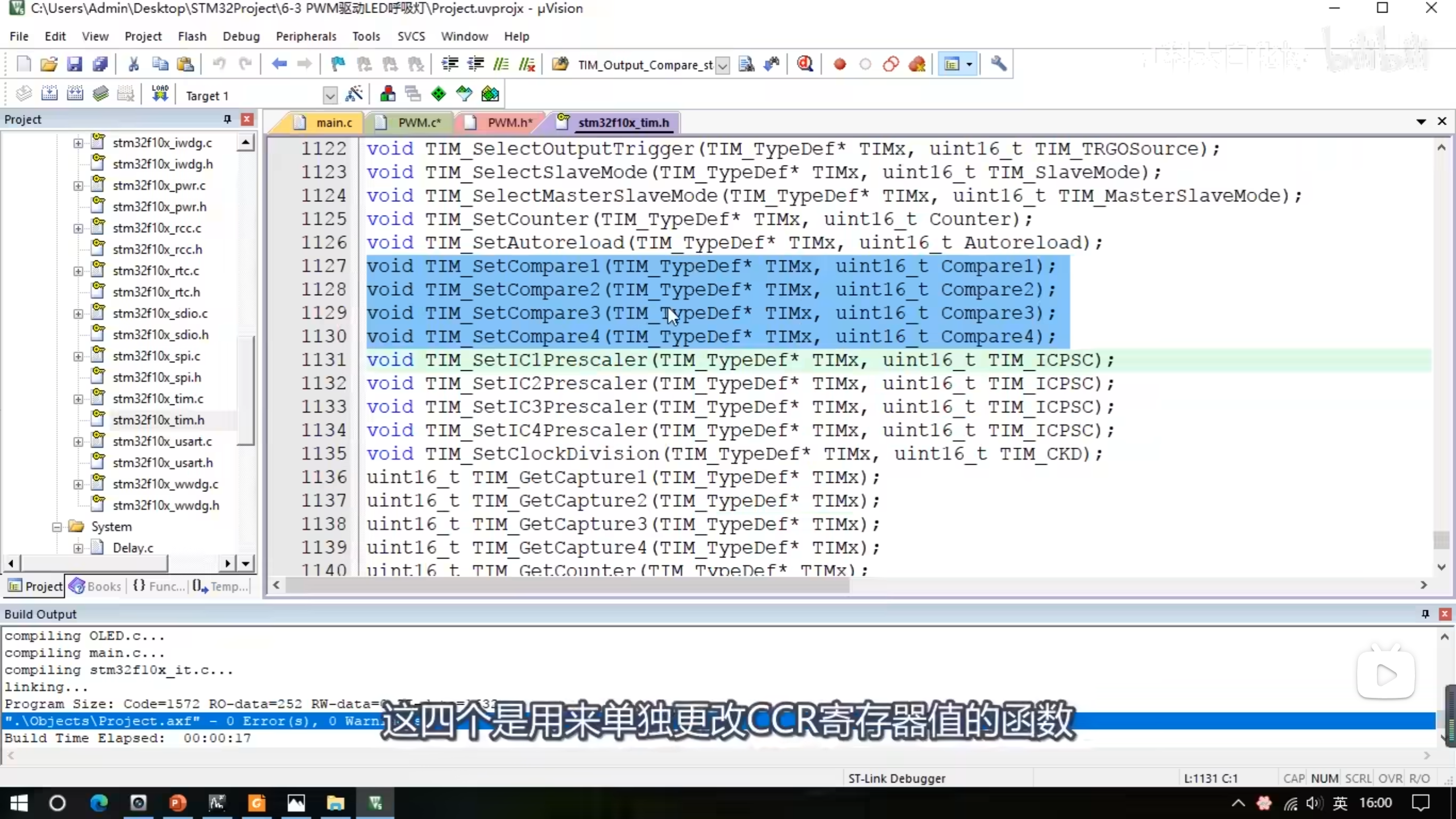
PWM_SetCompare2(Angle / 180 * 2000 + 500); //设置占空比
//将角度线性变换,对应到舵机要求的占空比范围上
}27main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Servo.h"
#include "Key.h"
uint8_t KeyNum; //定义用于接收键码的变量
float Angle; //定义角度变量
int main(void)
{
/*模块初始化*/
OLED_Init(); //OLED初始化
Servo_Init(); //舵机初始化
Key_Init(); //按键初始化
/*显示静态字符串*/
OLED_ShowString(1, 1, "Angle:"); //1行1列显示字符串Angle:
while (1)
{
KeyNum = Key_GetNum(); //获取按键键码
if (KeyNum == 1) //按键1按下
{
Angle += 30; //角度变量自增30
if (Angle > 180) //角度变量超过180后
{
Angle = 0; //角度变量归零
}
}
Servo_SetAngle(Angle); //设置舵机的角度为角度变量
OLED_ShowNum(1, 7, Angle, 3); //OLED显示角度变量
}
}28




















 4694
4694

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









