







收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。

一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
Ubuntu18.04安装ROS Melodic目录
一、Ubuntu不同的版本对应ROS不同的版本
操作系统为Ubuntu 18.04 LTS 64bit应采用ROS版本为ROS Melodic。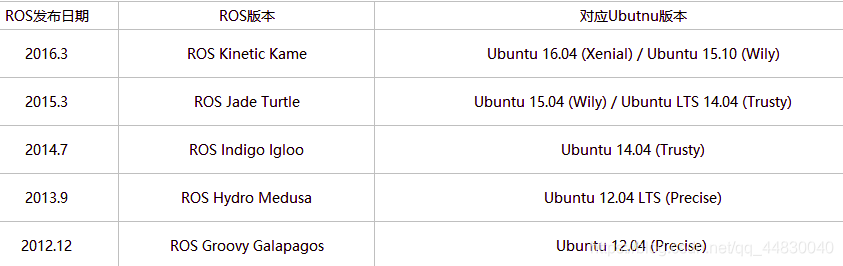
二、配置Ubuntu软件库
配置Ubuntu存储库以允许"main", “restricted” ,“universe,” and “multiverse”,如图所示

三、安装过程及问题解决
1.设置安装源
- 避免后面会出现无法定位软件包的错误,这里ROS提供了国内的安装源,添加国内安装源命令
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'

2.设置密钥
- 若密钥服务器hkp://ha.pool.sks-keyservers.com:80无法添加成功,则可以尝试**
hkp://pgp.mit.edu:80或者hkp://keyserver.ubuntu.net:80** - 我使用的是下面这句命令是执行成功了的
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116

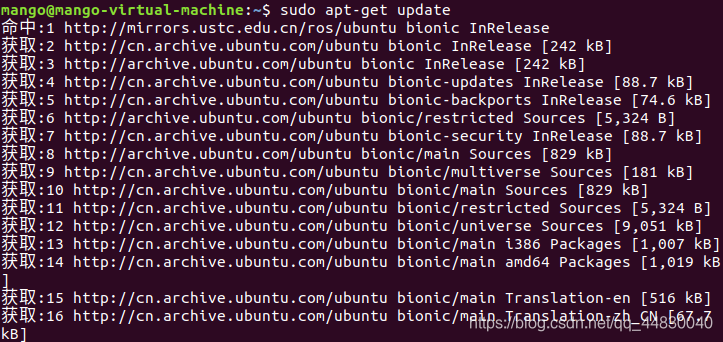
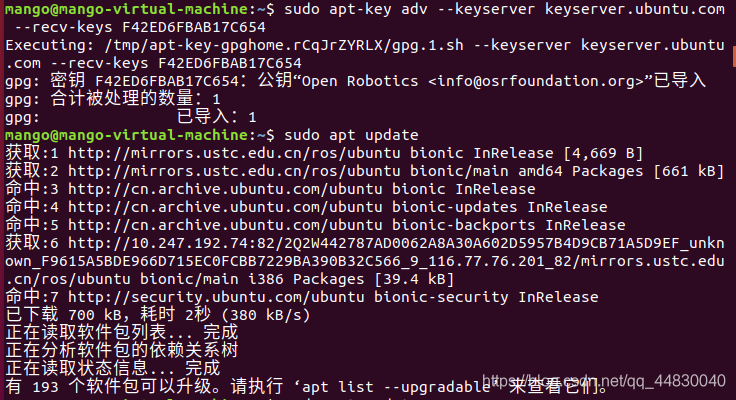
3.更新Ubuntu 18.04 LTS的最新可用软件包列表
sudo apt update
- 如果出现如下错误
W: GPG 错误:http://mirrors.ustc.edu.cn/ros/ubuntu bionic InRelease: 由于没有公钥,无法验证下列签名: NO_PUBKEY F42ED6FBAB17C654
E: 仓库 “http://mirrors.ustc.edu.cn/ros/ubuntu bionic InRelease” 没有数字签名。
N: 无法安全地用该源进行更新,所以默认禁用该源。
N: 参见 apt-secure(8) 手册以了解仓库创建和用户配置方面的细节。
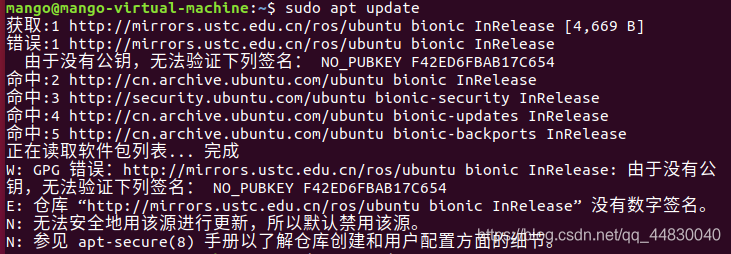
解决办法,执行如下命令
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
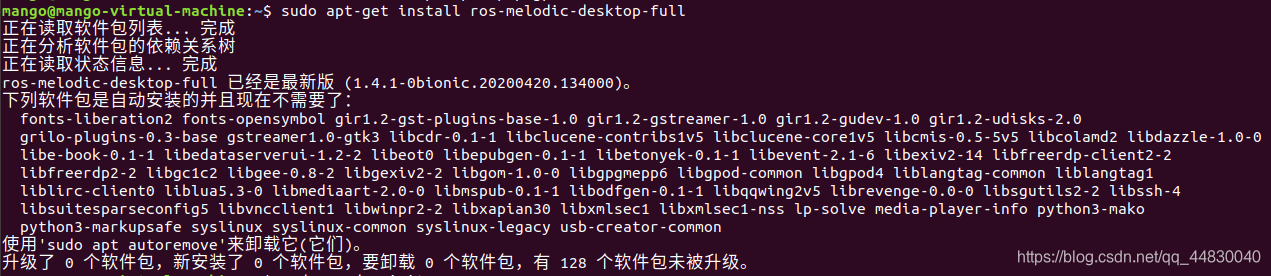
4.开始安装ROS Melodic
sudo apt-get install ros-melodic-desktop-full
- 如果出现如下问题
E: 无法获得锁 /var/lib/dpkg/lock-frontend - open (11: 资源暂时不可用)
E: 无法获取 dpkg 前端锁 (/var/lib/dpkg/lock-frontend),是否有其他进程正占用它?

解决办法,执行如下命令,删除 /var/lib/dpkg/lock-frontend - open
ls /var/lib/dpkg/lock-frontend
sudo rm -r -f /var/lib/dpkg/lock-frontend
sudo rm -r -f /var/lib/dpkg/lock

再执行**sudo apt-get install ros-melodic-desktop-full**命令,成功运行如图所示
🚩
- 避免后面出现sudo rosdep:找不到命令提示,这里需要执行如下命令
sudo apt install python-rosdep
5.初始化rosdep
开始使用ROS之前,先初始化rosdep,rosdep能够轻松地安装要编译的源代码的系统依赖关系,rosdep是ROS核心组件运行的基础
sudo rosdep init

- 如果出现错误:
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.

解决办法,执行如下命令
cd /etc
sudo gedit hosts

在文件末尾添加
151.101.84.133 raw.githubusercontent.com
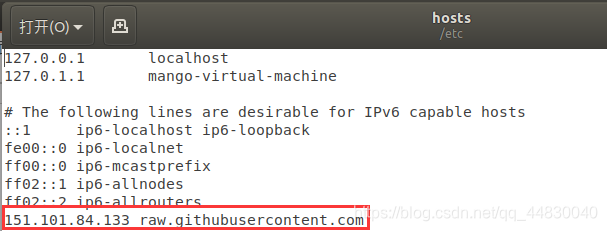
然后保存文件退出即可。
- 如果出现错误(我觉得这个错误是我在网上搜解决办法的时候自己手动新建了/etc/ros/rosdep/sources.list.d目录,并且还在这个目录下编辑了20-default.list的相关内容,我通过上面的方法正确解决了之后,产生了相同的文件20-default.list,二者发生冲突。嗯…就是需要删掉以前强制新建的。)
ERROR: default sources list file already exists:
/etc/ros/rosdep/sources.list.d/20-default.list
Please delete if you wish to re-initialize

解决办法,执行如下命令
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
然后再重新运行命令**sudo rosdep init**,可见就成功解决了!

6.执行rosdep update更新
rosdep update

- 如果出现如下错误
ERROR: error loading sources list:


**既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上物联网嵌入式知识点,真正体系化!**
**由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、电子书籍、讲解视频,并且后续会持续更新**
**[如果你需要这些资料,可以戳这里获取](https://bbs.csdn.net/topics/618679757)**
)]
**既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上物联网嵌入式知识点,真正体系化!**
**由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、电子书籍、讲解视频,并且后续会持续更新**
**[如果你需要这些资料,可以戳这里获取](https://bbs.csdn.net/topics/618679757)**















 4453
4453











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









