






// Pcd2Ply.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include <pcl/io/pcd_io.h>
#include <pcl/io/ply_io.h>
#include<pcl/PCLPointCloud2.h>
#include<iostream>
#include<string>
using namespace pcl;
using namespace pcl::io;
using namespace std;
int PCDtoPLYconvertor(string & input_filename, string& output_filename)
{
pcl::PCLPointCloud2 cloud;
if (loadPCDFile(input_filename, cloud) < 0)
{
cout << "Error: cannot load the PCD file!!!" << endl;
return -1;
}
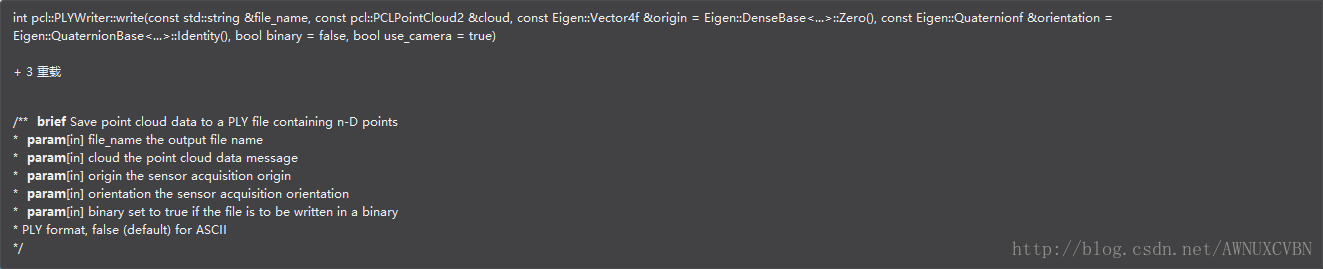
PLYWriter writer;
writer.write(output_filename, cloud, Eigen::Vector4f::Zero(), Eigen::Quaternionf::Identity(), false, true);
return 0;
}
int _tmain(int argc, _TCHAR* argv[])
{
string input_filename = "In.pcd";
string output_filename = "Out.ply";
PCDtoPLYconvertor(input_filename, output_filename);
return 0;
}
PLY文件乱码问题















 1449
1449

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









