







目录

【注:整体流程来说,使用方案三:Docker安装,即使用官方给出的环境进行配置,会节省很大的开发时间和成本,比较方案一和二的部署更加迅速,由于是使用Docker官方环境,不利于我们学习其基本的环境和相关配置,但是如果想要快速部署环境,Docker会是一个非常好的工具】
一、Autoware.universe背景
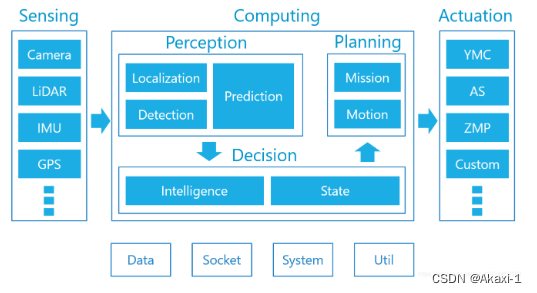
Autoware是一个基于ROS(机器人操作系统)开发的,开源的自动驾驶软件栈。它可以用于为各种各样的车辆,如汽车和卡车等,开发和部署先进辅助驾驶系统(ADAS)
Autoware版本:
Ai:基于ROS1
Auto:基于ROS2
Universe:商用/二次开发
官方文档:Autoware Universe Documentation
二、安装说明
参考官网的安装教程:
在Autoware Documentation官方文档可以详细的看到安装流程~
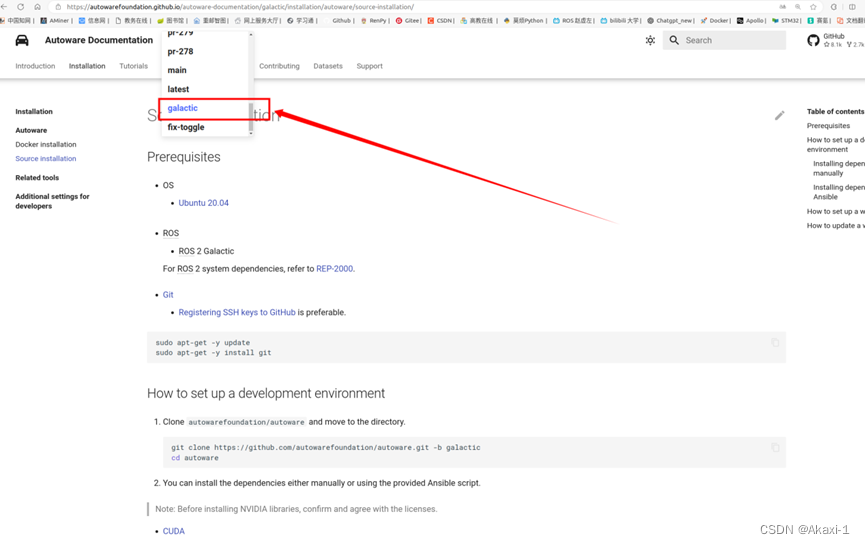
选择galactic版本
关于Doker:什么是Docker?看这一篇干货文章就够了! - 知乎 (zhihu.com)
三、安装git
打开终端执行代码
sudo apt-get -y update
sudo apt-get -y install git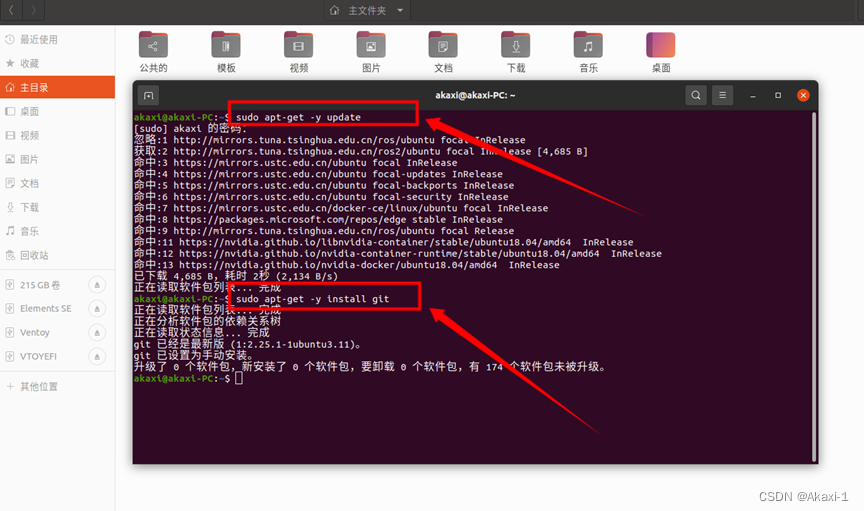
可以看到我们成功安装了git~
四、克隆autoware
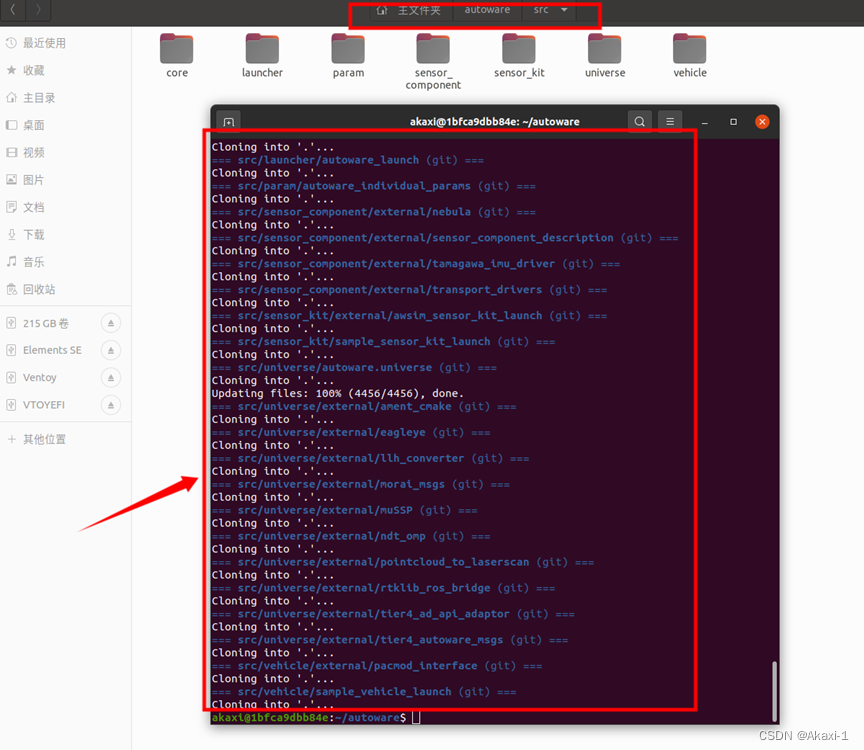
输入指令克隆官网的autoware仓库
git clone https://github.com/autowarefoundation/autoware.git
克隆成功,可以看到我们在桌面的autoware仓库文件夹
五、安装cuda
指令输入 nvidia-smi 看看自己的电脑有没有Nvidia的驱动和cuda
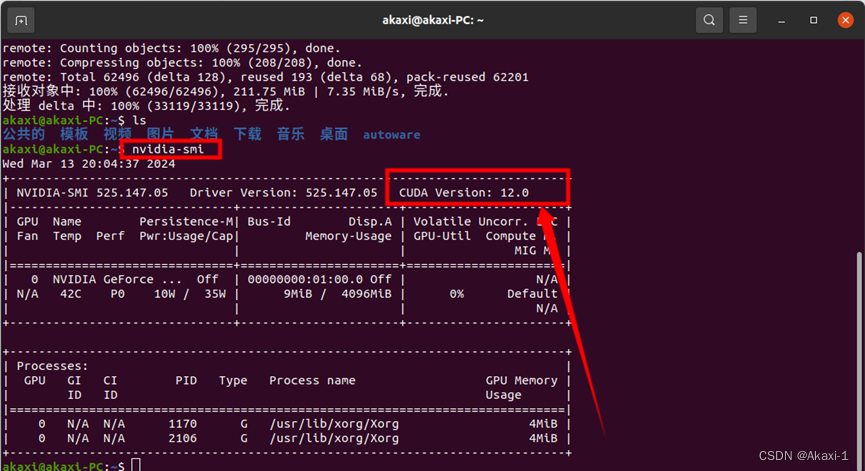
这里我的电脑自带Nvidia驱动和cuda,如果你的Ubuntu系统没有适配上GPU显卡的话,可能会跑不起autoware嘞,如果你的电脑没有Nvidia驱动和cuda,可以去官网下载驱动,这是一些安装驱动参考链接:
【ubuntu环境配置】超详细ubuntu20.04/22.04安装nvidia驱动/CUDA/cudnn_ubuntu20安装nvidia显卡驱动-CSDN博客
Ubuntu18-22.04安装和干净卸载nvidia显卡驱动——超详细、最简单_ubuntu安装nvidia显卡驱动-CSDN博客
六、安装Docker软件
使用鱼香ROS一键安装指令,我们就能非常方便的安装Docker~,感谢鱼香ROS大佬
wget http://fishros.com/install -O fishros && . fishros
输入指令后选择8,一路自动下去我们的Docker就安装好啦
七、安装Nvidia Container Toolkit
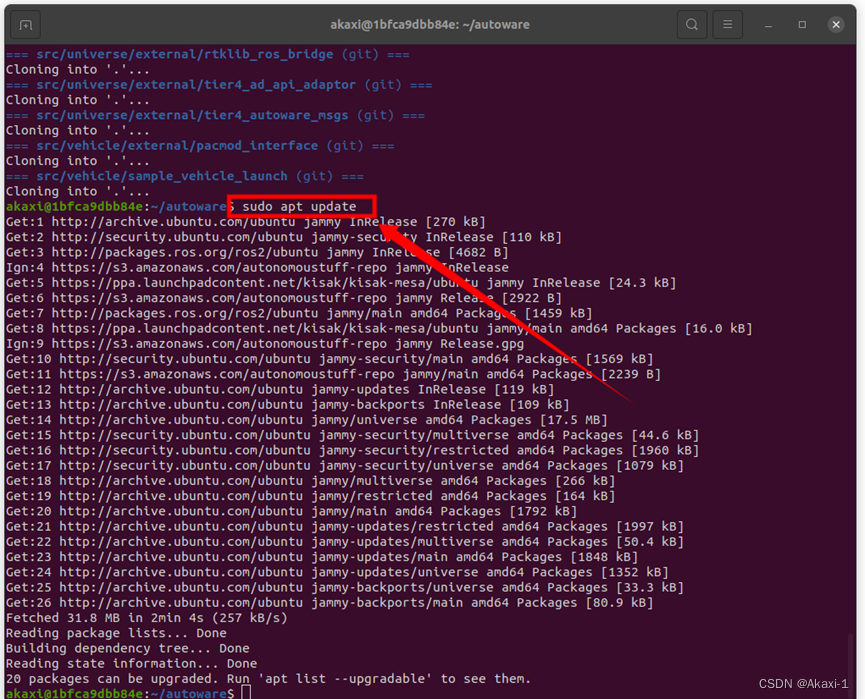
首先执行指令更新程序
sudo apt update
sudo apt upgrade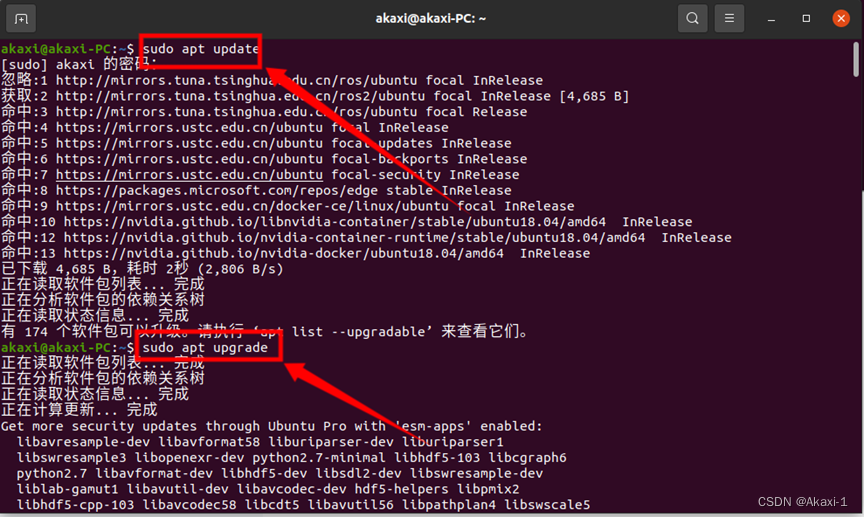
紧接着,安装Nvidia Container Toolkit工具
sudo apt-get install -y nvidia-container-toolkit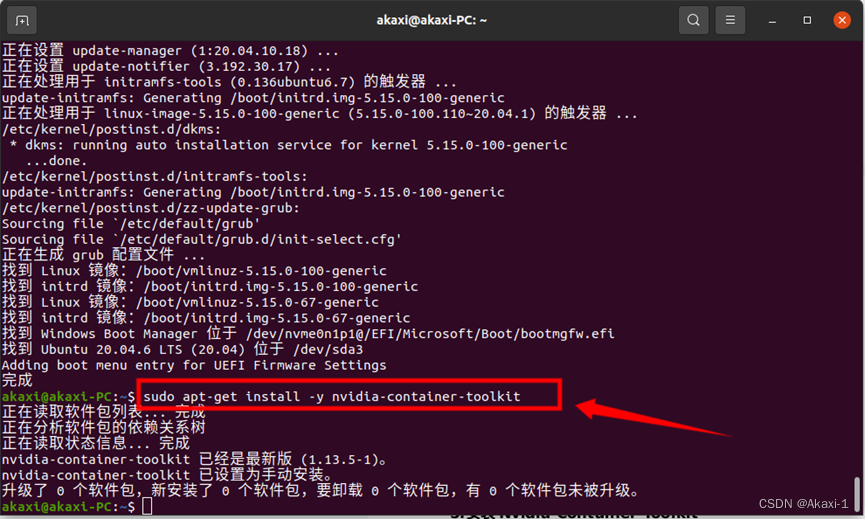
最后,输入指令查看有没有安装好
dpkg -l | grep nvidia-container-toolkit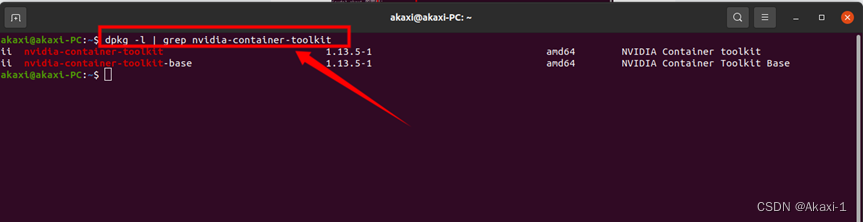
八、安装Rocker
输入指令安装Rocker
sudo apt-get install python3-rocker
安装完成~
随后我们安装需要的Python环境
sudo apt-get install python3-venv
完成啦~
九、拷贝Autoware的Docker镜像
通过Docker拷贝官方的autoware环境,输入指令:
docker pull ghcr.io/autowarefoundation/autoware-universe:latest-cuda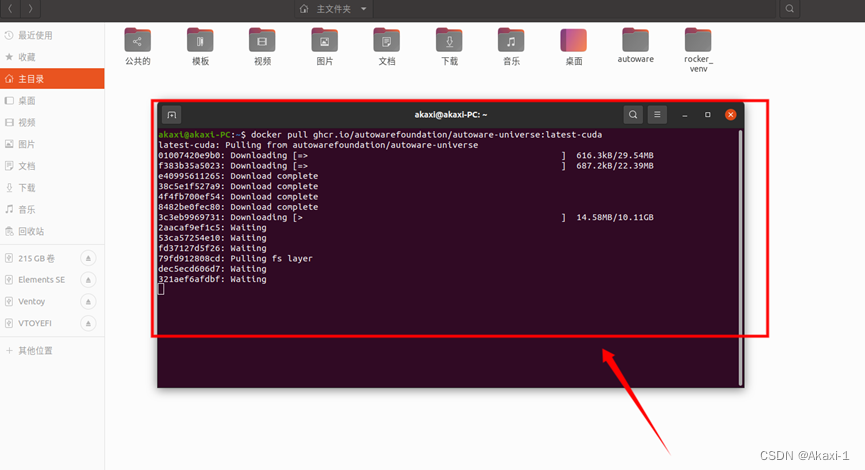
输入指令拷贝官网最新的docker,一共18.7G大小,大概【1小时】左右
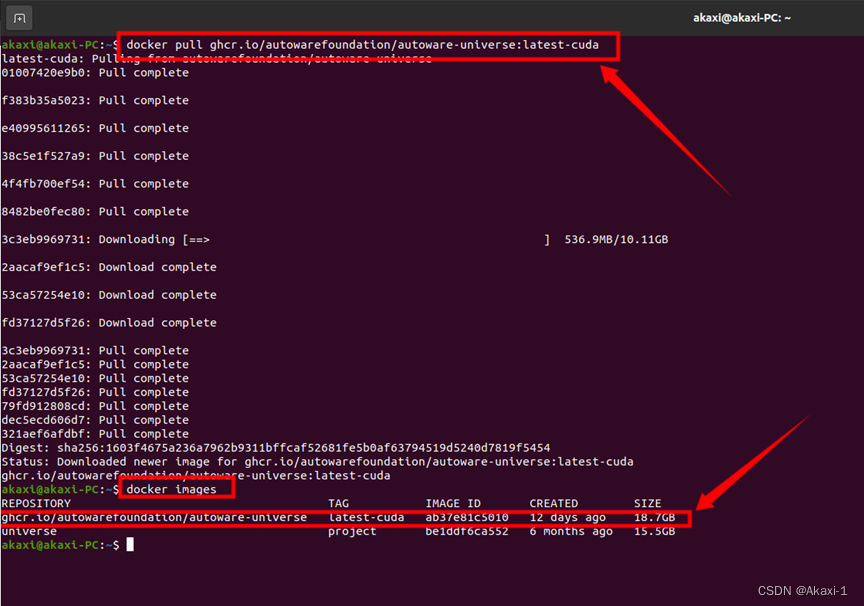
输入指令 docker images 查看镜像。可以看到我们已经成功安装了容器拉
十、创建autoware_map文件夹
指令:
mkdir autoware_map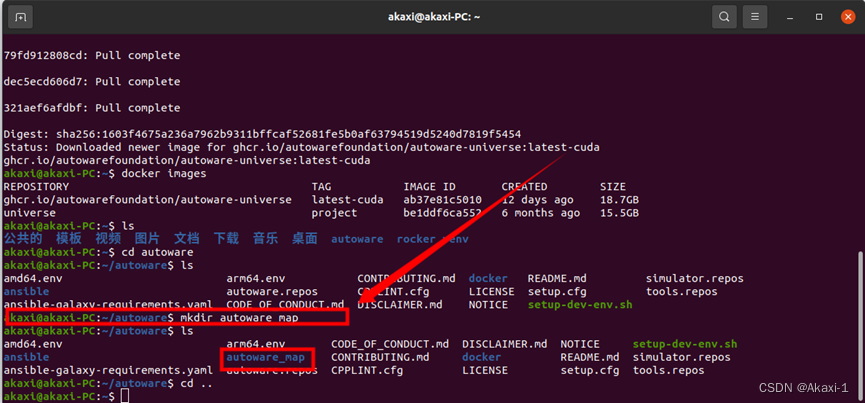
十一、启动docker
启动docker采用CPU或者GPU加速,二选一即可
指令:
【使用CPU】rocker -e LIBGL_ALWAYS_SOFTWARE=1 --x11 --user --volume $HOME/autoware --volume $HOME/autoware_map -- ghcr.io/autowarefoundation/autoware-universe:latest-cuda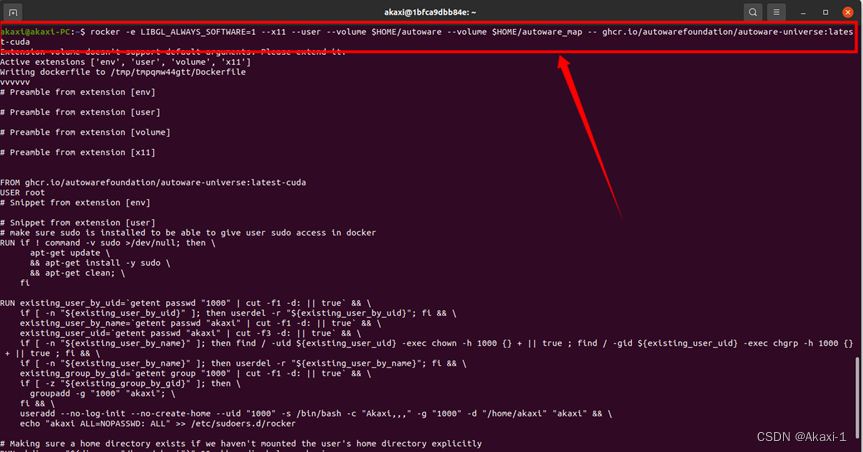
【使用GPU加速】rocker --nvidia --x11 --user --volume $HOME/autoware --volume $HOME/autoware_map -- ghcr.io/autowarefoundation/autoware-universe:latest-cuda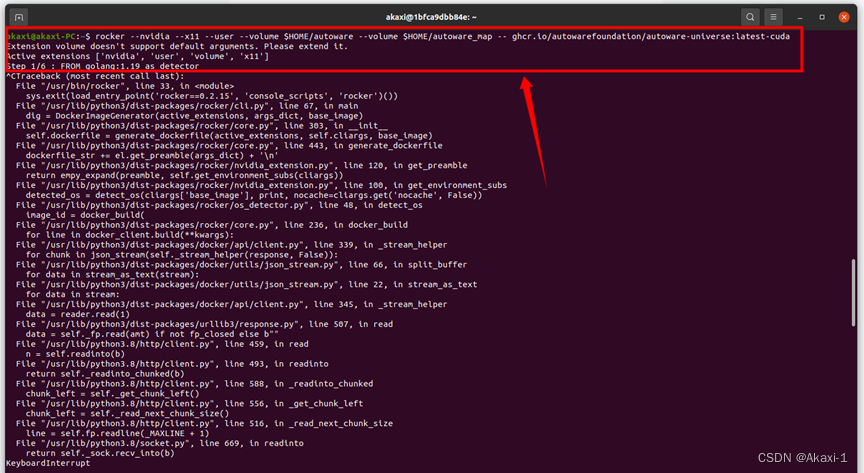
这里使用GOU失败了,卡住大概10min,使用CPU成功啦~
十二、源码拷贝
依次输入指令,我们拷贝源码
cd autoware
mkdir src
vcs import src < autoware.repos
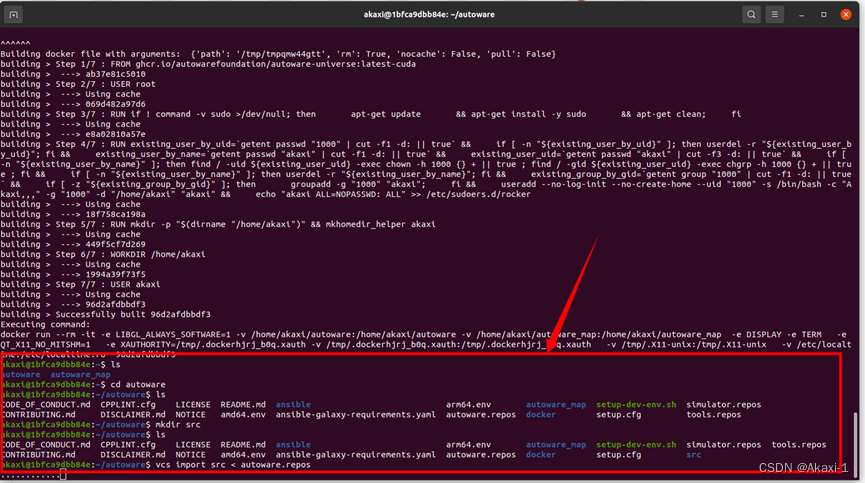
开始拷贝~
源码拷贝成功啦
十三、安装依赖
十四、编译Autoware.universe
输入指令,开始编译
【跳过包编译】
MAKEFLAGS="-j4" colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release --executor sequential
在编译过程如果有包报错,导致编译失败,可以在指令后面加上,忽略这个包执行编译,最后我们再对忽略的包再一对一进行编译就行啦~
这是我的编译完成指令(注意跳过了部分包哈)
【能够编译完】【跳过了部分的包】
MAKEFLAGS="-j4" colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release --executor sequential --packages-skip costmap_generator map_tf_generator yabloc_common yabloc_image_processing yabloc_particle_filter yabloc_pose_initializer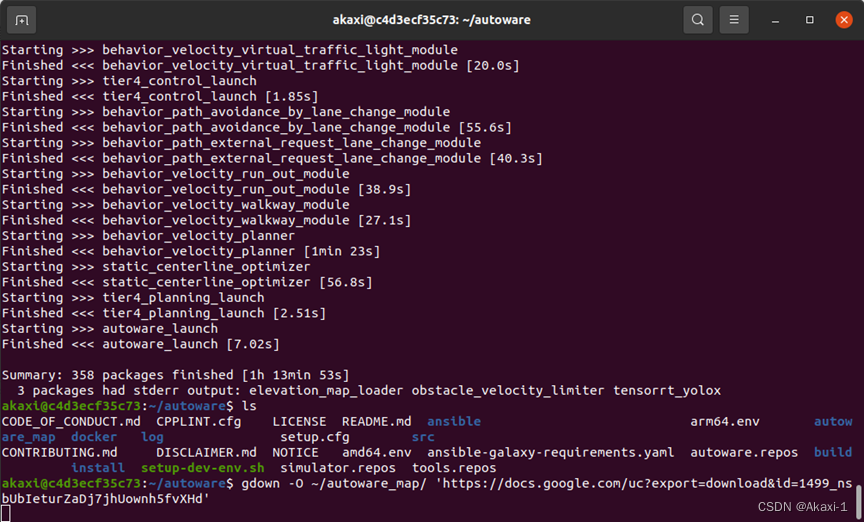
十五、测试Autoware.universe
输入指令,安装测试所需资源地图
gdown -O ~/autoware_map/ 'https://docs.google.com/uc?export=download&id=1499_nsbUbIeturZaDj7jhUownh5fvXHd'
unzip -d ~/autoware_map ~/autoware_map/sample-map-planning.zip登录我们的container , 进入Autoware,开始测试环节
rocker --nvidia --x11 --user --volume $HOME/autoware --volume $HOME/autoware_map -- ghcr.io/autowarefoundation/autoware-universe:latest-cuda
source ~/autoware/install/setup.bash
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/autoware_map/sample-map-planning vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit会出现类似下面的界面

参考链接
【安装教程】ubuntu20.04/22.04从零开始搭建autoware.universe-CSDN博客
Ubuntu 20.04 安装 Autoware.universe - 知乎 (zhihu.com)
2024.4.1
渝北仙桃数据谷
















 1392
1392











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











