







结论
全波形激光雷达?已经解决了全波形激光雷达(FWL)的一些关键优势,特别是在模糊介质方面。
许多作者已经证明压缩感知[107]具有从相对较少的样本(通常是随机采样)中获取高分辨率图像的潜力
减少像素采样的数量,使用光学方法随机采样的好处是,它允许我们使用更少的像素点,并获得更快的帧率。

利用压缩感知技术提高激光雷达的分辨率?
问题:压缩感知依赖于信号或图像在某些领域的稀疏性,压缩感知LiDAR的图解大多使用简单的测试场景,表面简单,甚至反射率均匀
对于自动驾驶激光雷达来说,异常情况多于通常情况,所以必须小心稀疏域?不能消除不规则行为。
同样,在场景重建中,确保基础稀疏性假设是适用的,并包括对重建场景数据的不确定性的估计是很重要的,表面形状是利用先验的距离知识来感知的,即使用不同的焦点深度。
然而,在汽车激光雷达中,假设必须在所有范围内感知场景,并且在恶劣天气中,必须分析介质
但是,如果我们检查通过雾的感知,我们就会意识到,我们不能像几乎所有以前的研究那样,假设返回光的均匀和恒定的到达是深度的函数
如果我们想根据变化的条件进行动态调整,那么我们需要知道这些条件是什么,这是一个循环问题
因此,我们认为,通过更好分辨率的雷达数据过滤的FWL可以在未来给出高分辨率的场景重建,但不是立即。
不同传感器之间的干扰也是个潜在的问题。如下,且无法通过理论来模拟这些影响2

总之,我们认为FWL是未来汽车行业传感系统的关键组成部分,在恶劣天气条件下,对中间介质的分析是算法和传感器开发的关键组成部分。
引言
讨论恶劣天气下,激光雷达穿越障碍媒介的能力,以达到在保持高空间分辨率优势的同时,更接近恶劣天气下的毫米波雷达性能。
我们从我们自己和其他研究人员在FWL方面的工作中提供了例证,并对实现FWL汽车传感的必要步骤进行了总结和讨论。
传感器
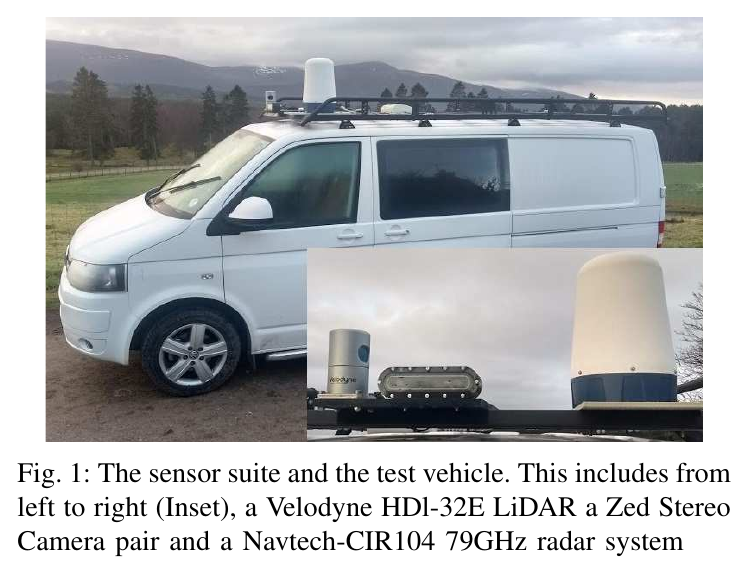
并发多模态数据
 FWL数据是否可以为在恶劣条件下获取更详细的3D场景图做出有价值的贡献?
FWL数据是否可以为在恶劣条件下获取更详细的3D场景图做出有价值的贡献?
恶劣天气下的激光信号传输
信号的衰减和散射
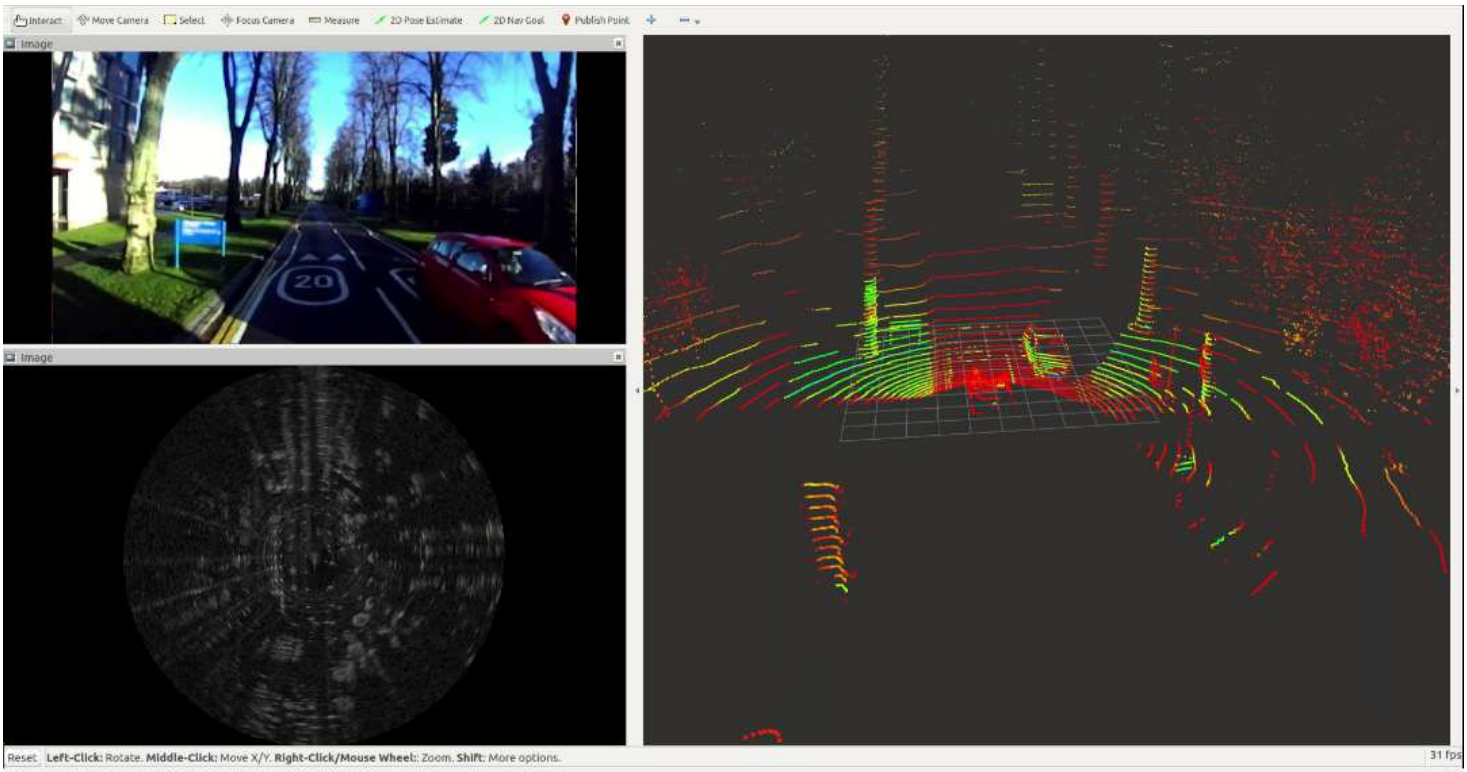
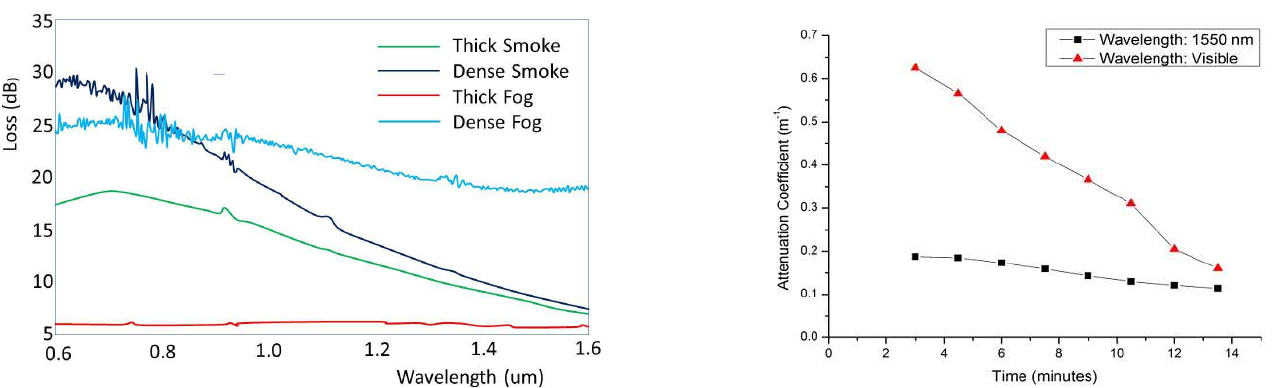
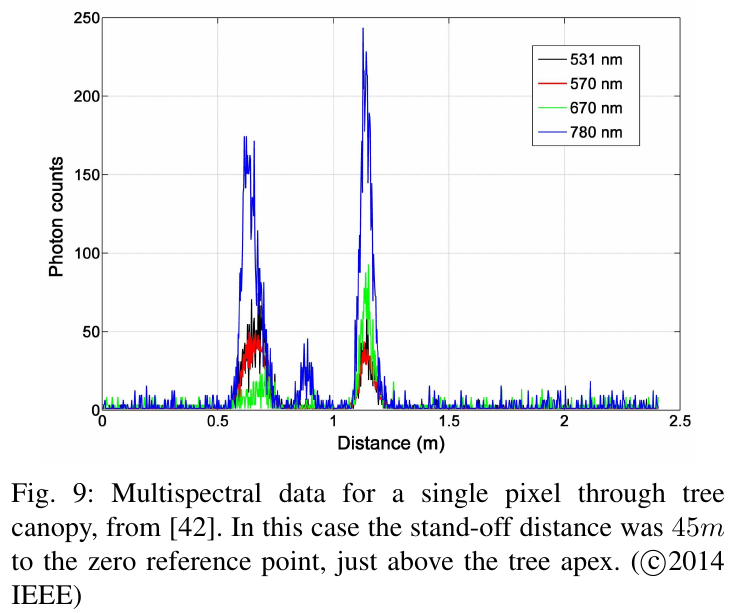
光在1550nm处的传播比在较短波长处受遮蔽物的衰减要小,但Kim等人[17]根据理论建模和文献荟萃分析,认为这一结论在烟雾中成立,但在雾霾中不一定成立。

下图为波长分析-各个波长在各场景下的衰减率
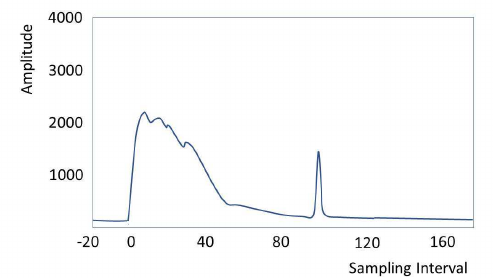
40米处大部分返回的信号来自中间的介质,而且有明显的峰值,据推测,是由于相对稀疏的介质中的不均匀体积。
在10米能见度下(未显示),中间介质是均匀的,但目标几乎看不到,如果有的话
最近,Carballo等人进行了一项广泛的研究。[30]检查了12种不同的激光雷达传感器的性能,以捕获200米天气室内场景的距离精度和密度,模拟下雨和有雾的条件。

全波形激光雷达的信号分析
激光雷达点云脉冲模型认为是单个表面返回的非归一化统计混合
波形密度函数:

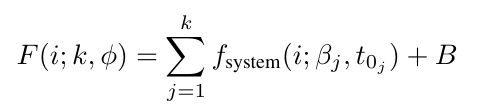
k表示返回的点数,β各峰值振幅,t0 峰值位置
图9显示了单个阵列像素的四种这种波形的示例。















 158
158











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









