






2023年12月底,百度推出了Apollo开放平台的全新升级版本—Apollo开放平台9.0。从2017.4月Apollo 1.0发布至今,已经走过了7个年头。可以说,Apollo就是自动驾驶高速发展的一个缩影,作为自动驾驶的黄埔军校,深刻影响了我们这一代自动驾驶er,是中国自动驾驶皇冠上的明珠!据汽车人了解,国内一线自动驾驶公司(地大华魔)都有Apollo的影子,而Apollo中最经典、应用最广泛的当属行车&泊车中的决策规划框架!很多初创公司更是直接使用Apollo的EM Planner!

而站在2024年端到端自动驾驶的元年,很多传统规控的小伙伴也在犹豫不决,现在入传统规控过时了吗?未来几年会不会保不住饭碗?
从技术角度分析:决策规划分为rule-based和learning-based两个大方向。rule-based比较保险,开源框架的代表作就是Apollo和Autoware,可以实打实的去解决一个又一个的具体场景。此外国内端到端落地尚不明朗。在极复杂路口的实车表现还要打一个大大的问号?很多公司仍在demo阶段,还不敢投入主力入场。尤其是对安全性要求更高的L4,传统规控仍然占据主导地位!
从面试角度角度来说:对于大部分基础问题, 几乎都可以从Apollo开源代码里找到答案!尤其是从事自动驾驶,C++是必备的,而Apollo的工程规范恰恰就是刚毕业的同学最缺乏的。可以说熟练掌握了Apollo的决策规划框架,面试基本上稳了!
从就业方面来说:百度的招聘直接明确的标明"熟悉开源Apollo"优先。其他公司不会这么明显的要求, 但是如果你学过 Apollo, 绝对是一个很大的加分项。在这种大背景下,Apollo决策规划框架绝对可以说是自动驾驶入门最好的学习材料之一了。
行车&泊车决策规划的难点在哪里?
领域发展相对成熟,数学基础要求高;
落地刚需,C++代码功底要求高;
工程性强,逻辑思维能力要求高;
...
而对刚入门自动驾驶决策规划的小白来说,面对网上多如牛毛的相关博客,不禁会疑惑:什么才是最有价值的学习资料?C++工程代码如何快速入门?这么大的开源项目如何学习?工程实现和数学公式到底怎么对应上的?
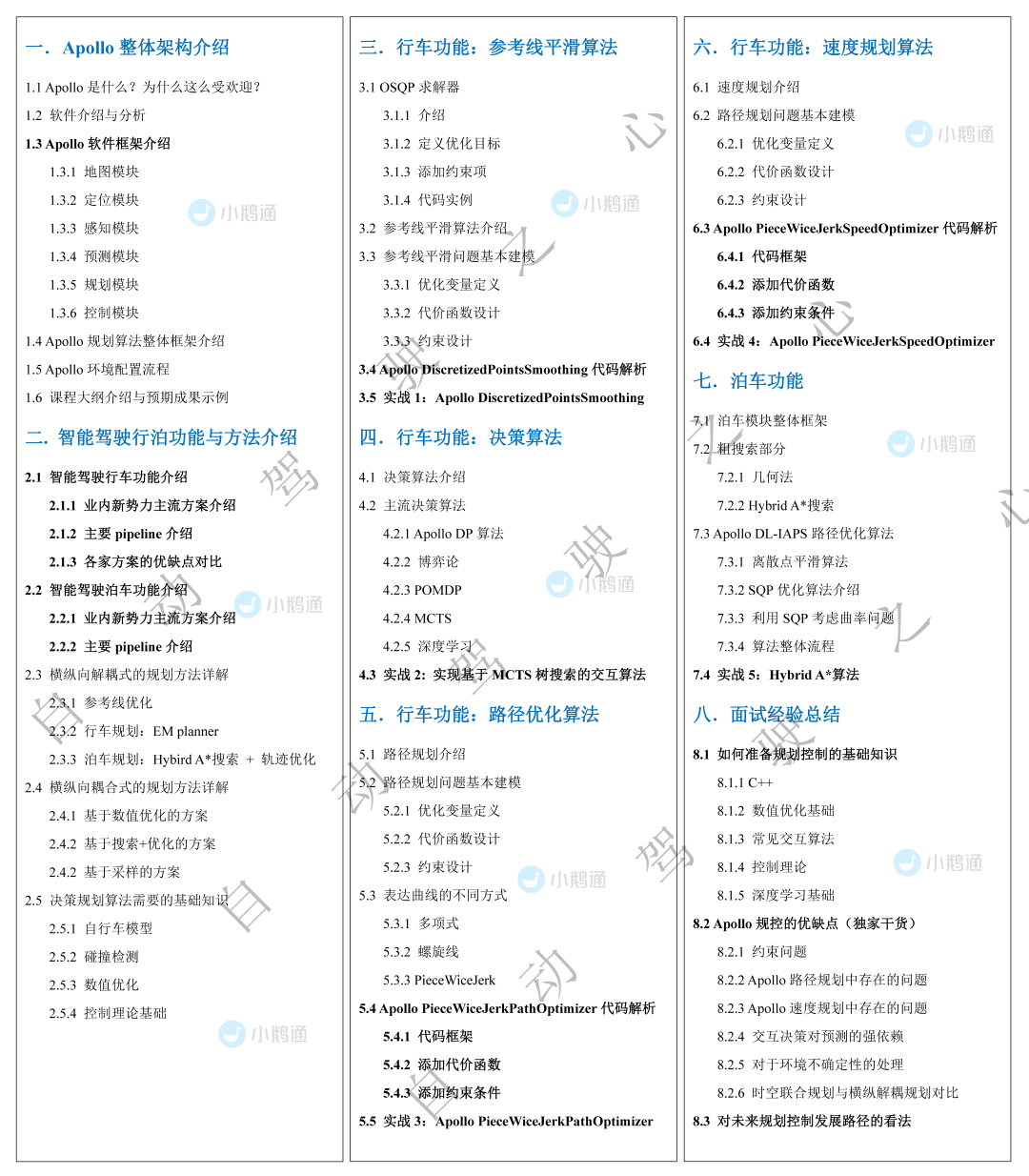
为此,自动驾驶之心在调研大家的需求后,联合自动驾驶之心课研团队,出品了国内最新最全的《面向工业级的Apollo规划控制实战》,主讲老师是一线头部自动驾驶公司规划控制算法工程师。大纲如下:
这门课程怎么将会展开?
课程对业使用最广泛的Apollo决策规划框架展开深入的剖析。聚焦于智能驾驶行车、泊车决策规划的全面理解。课程包含五大实战,吃透行车功能和泊车功能的五大模块,彻底搞懂自动驾驶决策规划。每个模块会配有一个对应实战,让大家不仅明白算法原理,还要搞懂实现细节。最后一章更是汇聚老师多年的工作心得,讲解独家干货!
本门课程面向在校从事自动驾驶研究方向的硕士、博士,以及正在从事规划控制落地的工作人员、想要转入自动驾驶规划控制方向的同学,正在准备相关方向岗位的校招、社招同学,需要项目来提升自己的同学。
第一章、Apollo整体架构介绍
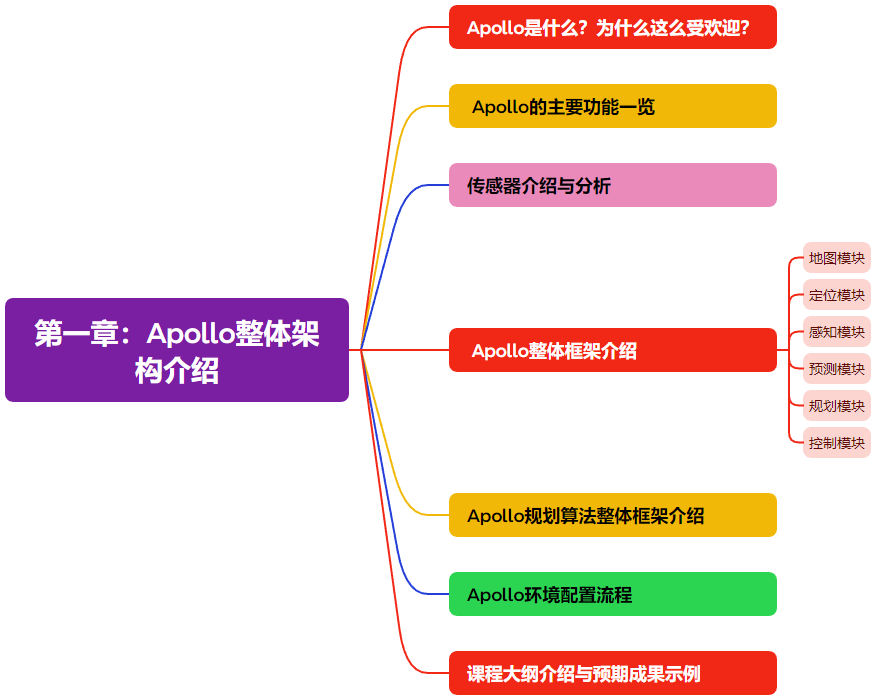
第一章为总纲篇,从整体上带大家了解Apollo框架。Apollo是什么?有哪些主要的模块?每个模块的功能是什么?进一步聚焦到Apollo规划算法的介绍上,并会讲解如何配置Apollo。总结来说,第一章会从整体上阐述本课程的框架及预期的学习成果。
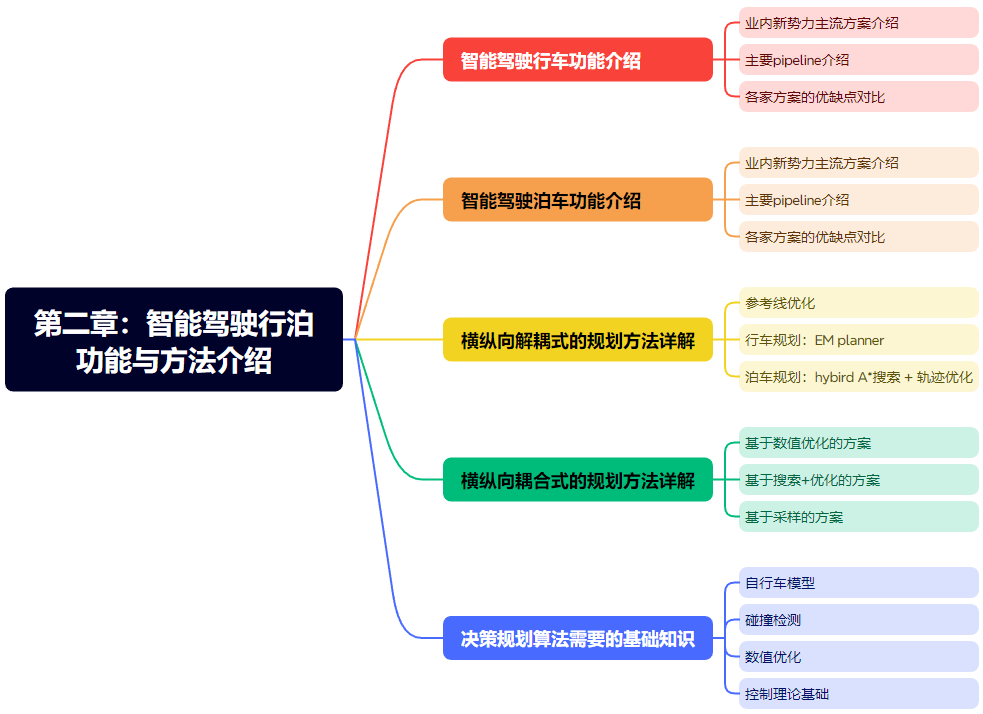
第二章、智能驾驶行泊功能与方法介绍
第二章进入到课程的基础讲解。首先概括性的介绍智能驾驶的行车功能和泊车功能,进一步对业内主流方案展开介绍并对比各自的优缺点。这是很多刚入门的同学所欠缺的,很多同学只注重具体的技术,而忽略了大局观。接着老师会带大家系统性的复盘规划控制的相关内容,从横纵向解耦到横纵向耦合再到决策规划的基础知识。总结来说,第二章是咱们课程的基石,从宏观上了解行泊功能的现状,从微观上掌握决策规划的基础。
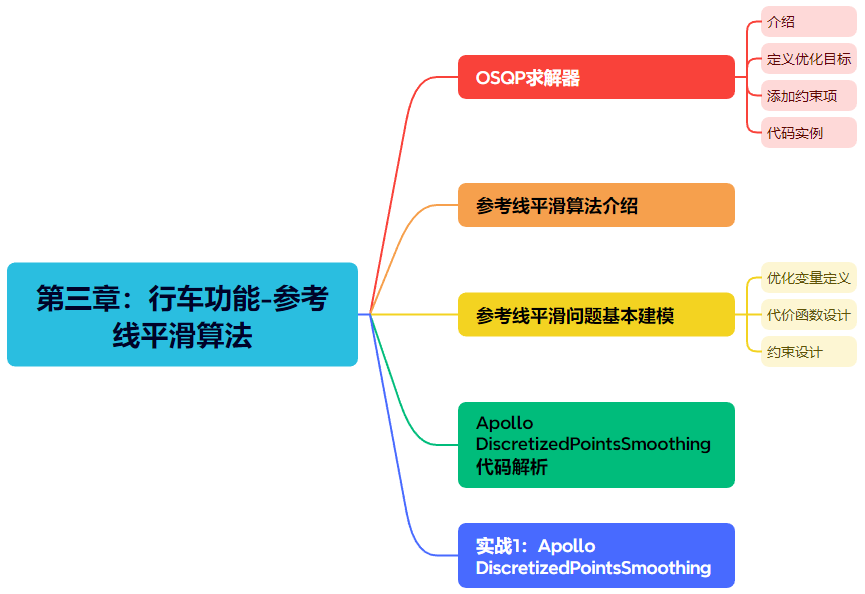
第三章、行车功能:参考线平滑算法
第三章进入到具体的行车功能参考线平滑算法讲解。首先明确为什么要做参考线平滑以及问题的基本建模。然后深入剖析OSQP求解器。最后上手实战,带大家一起学习Apollo DiscretizedPointsSmoothing的核心代码!
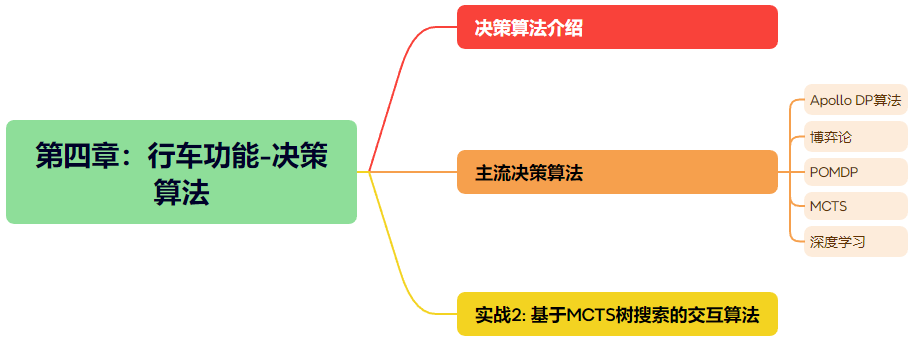
第四章、行车功能:决策算法
第四章则是讲解行车功能的决策算法。带大家全面复盘主流的决策算法,包含Apollo DP算法、博弈论、POMDP、MCTS以及深度学习的相关算法。最后上手实战,实现一个基于博弈论的MCTS加速加速交互算法。这块也是目前业界落地的最前沿。
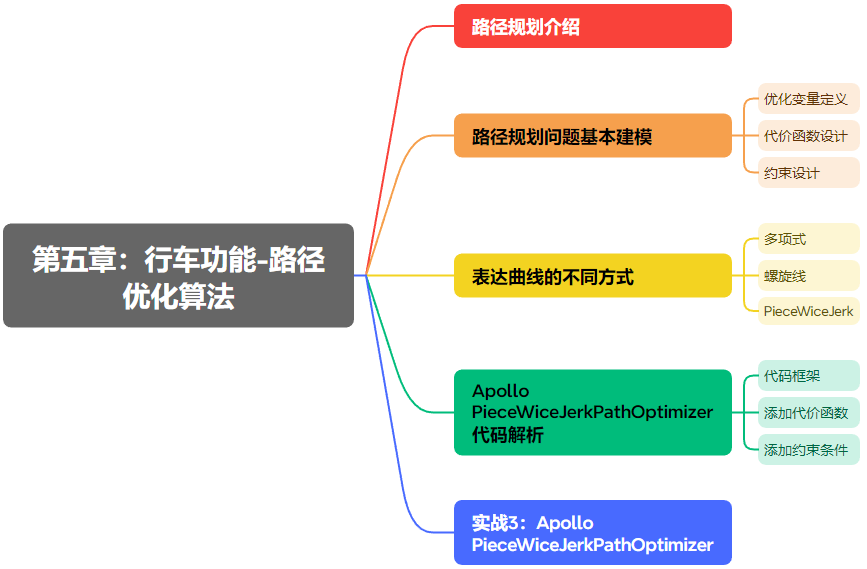
第五章、行车功能:路径优化算法
第五章进一步对Apollo行车路径优化算法展开讲解。首先整体上介绍路径规划,进一步讲解路径规划问题的基本建模和表达曲线的不同方式。最后上手实战,详细讲解Apollo PieceWiceJerkPathOptimizer模块的核心代码。
第六章、行车功能:速度规划算法
第六章讲解行车的最后一个算法模块——速度规划算法。基于路径规划问题的基本建模。进一步展开实战,详细讲解Apollo PieceWiceJerkSpeedOptimizer模块的核心代码。

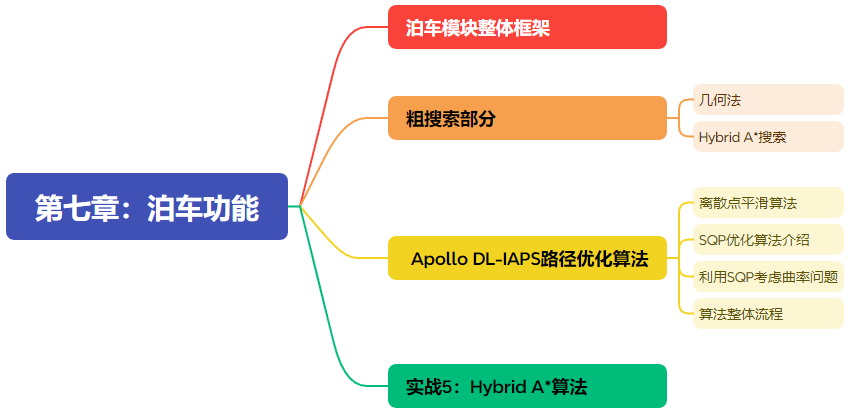
第七章、泊车功能
经过前四章节行车模块的讲解,大家已经对Apollo规划控制有了一个更深入的理解。第七章则聚焦在泊车功能的讲解上。首先从整体上带大家过一遍泊车模块的框架,进一步详细讲解泊车的粗搜索部分。然后剖析Apollo DL-IAPS路径优化算法。最后实战Hybrid A*算法。
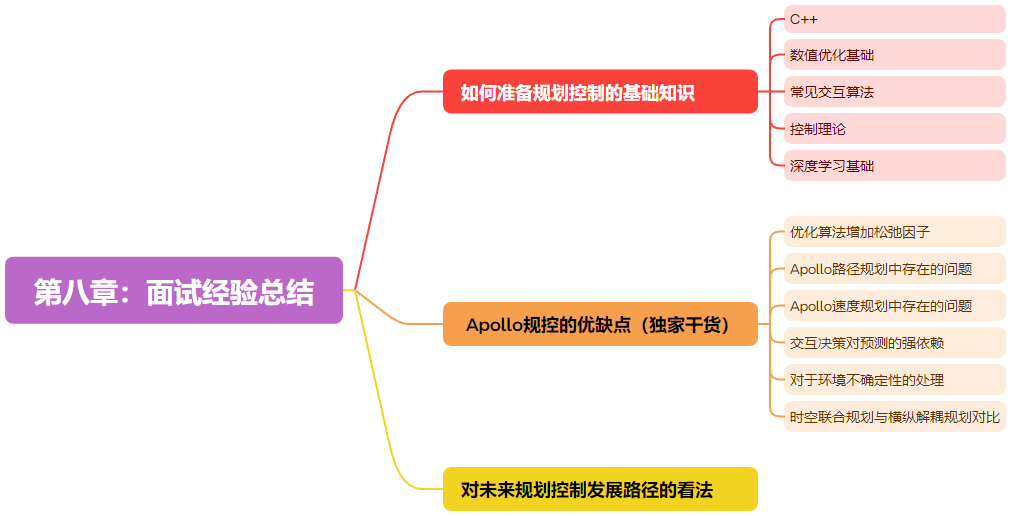
第八章、面试经验总结
前面七个章节主要聚焦在技术层面,第八章则聚焦于求职面试。很多校招生或者转行而来的小伙伴不清楚如何准备面试,所以老师从面试官的角度先带大家复盘如何准备规控相关的基础知识,C++/数值优化/常见的交互算法/控制理论和深度学习等等。接着老师根据个人多年的工作经验,为大家带来独家干货—Apollo规控的优缺点分析,实打实的干货!
主讲老师介绍
长风,硕士毕业于国内顶尖985高校,深耕自动驾驶算法领域多年,对Apollo开放平台有着极深的理解。现任业内头部自动驾驶公司团队资深决策规划算法工程师,在自动驾驶决策规划算法研究和工程落地方面有着丰富的经验。
学习基础
个人PC,Ubuntu 18.04;
一定的自动驶领域基础,了解自动驾驶的决策规划基本模块;
一定的概率论和线性代数基础,熟悉常用的数学运算;
具有一定的C++编程基础;
学后有什么收获?
这门课程是国内最全的Apollo行车&泊车决策规划实战教程,我们期望能够进一步推动自动驾驶在工业界中的落地,助力更多想要加入到自动驾驶行业的同学。我们期望学完本课程:
学完能够达到1年左右规划控制自动驾驶算法工程师水平;
对自动驾驶的上下游、完整的技术栈有着深刻了解;
能够将所学应用到项目中,真正搞懂如何优化决策规划;
无论是实习、校招、社招都能从中受益;
课程咨询与购买
Apollo早鸟优惠!扫码学习

更多咨询小助理

其他说明
课程9.15号正式开始,录播形式教学,vip群内答疑,课程周期预计3个月。















 945
945

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









