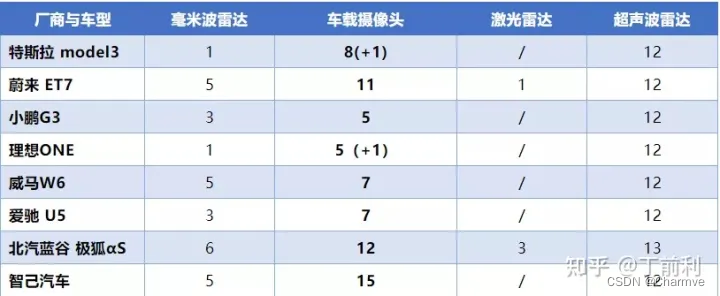
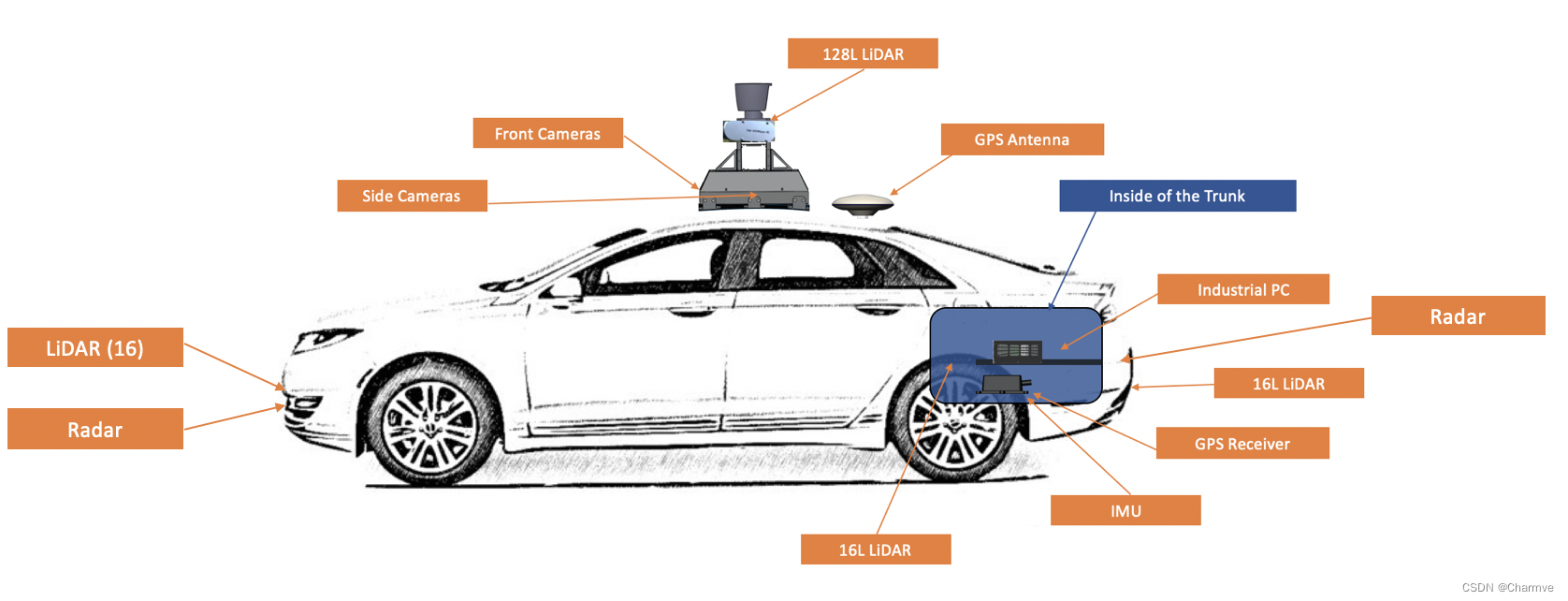
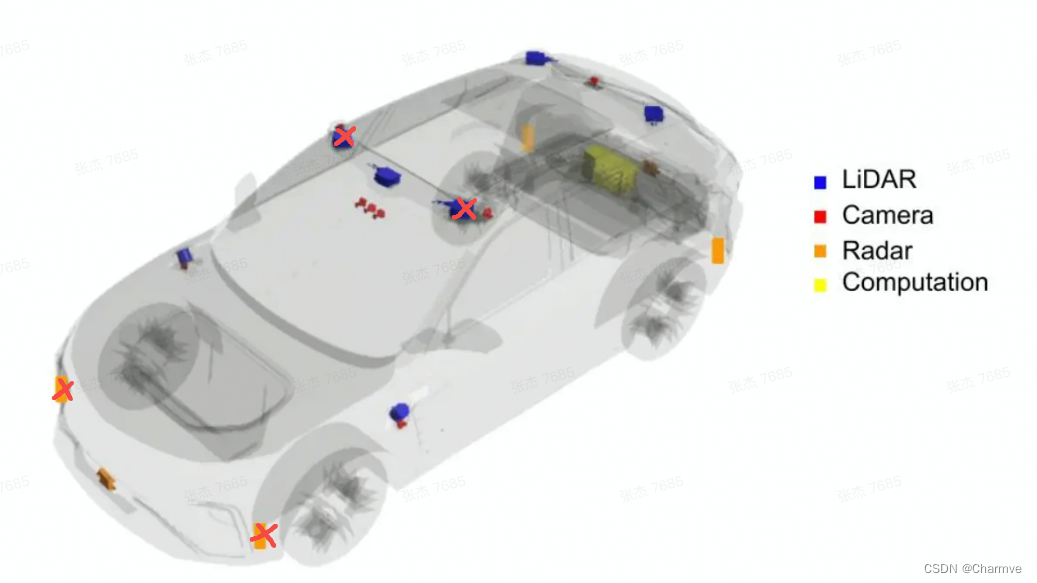
目录 一、输入:相机+雷达 (10%) 1. 车载相机使用概览 2. 相机的成像原理 3. 车载摄像头重要指标参数 相机模型中四个坐标系的关系 4. 车载摄像头的内外参标定 4.1 内参标定 4.2 外参标定 5. 相机基本图像处理 5.1 相机校正 5.2 透视变换 5.3 颜色阈值和区域掩码 5.4 图像变换(原理及源代码实现) 6. 实现方案及性能分析:opencv、nvmedia 7. 具体案例:车道线检测 一、输入:相机+雷达 (10%) 相机 1.1 车载相机使用概览 1.2 相机的成像原理 1.3 数字图像处理:去畸变、resize、颜色变换、转柱面、透视变换等(原理及源代码实现) 1.4 实现方案及性能分析:opencv、nvmedia 1.5 具体案例:车道线检测 1. 车载相机使用概览 百度Apollo 硬件传感器方案 轻舟QCraft硬件传感器方案 2. 相机的成像原理








 超级会员免费看
超级会员免费看
 本文深入探讨了车载相机在自动驾驶中的作用,包括相机成像原理、重要参数、内外参标定和图像处理技术。内容涵盖相机畸变校正、透视变换、颜色阈值处理以及在车道线检测中的应用,强调了OpenCV和nvmedia在实现方案中的性能分析。
本文深入探讨了车载相机在自动驾驶中的作用,包括相机成像原理、重要参数、内外参标定和图像处理技术。内容涵盖相机畸变校正、透视变换、颜色阈值处理以及在车道线检测中的应用,强调了OpenCV和nvmedia在实现方案中的性能分析。

 订阅专栏 解锁全文
订阅专栏 解锁全文




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



 2345
1688
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
2345
1688
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








